1
Изобретение относится к области пневматического приборостроения и может быть использовано прп синтезе самонастраивающихся систем для автоматического управления технологическими процессами.
Известны самонастраивающиеся системы, содержащие в качестве регулятора з равляющие устройства, имеющие в своем составе интегратор и анализатор качества 1. Эти самонастраивающиеся устройства обладают недостаточной точностью регулирования колебательных процессов.
Наиболее близким техническим решением является пневматический самонастраивающийся регулятор, содержащий анализатор и первый интегратор, подключенные к входным каналам параметра и задания, выход первого интегратора соединен с первым управляющим входом анализатора качества. Однако он обладает малым быстродействием за счет введения фильтров, вносящих в систему дополнительное запаздывание.
Целью данного изобретения является увеличение быстродействия регулятора.
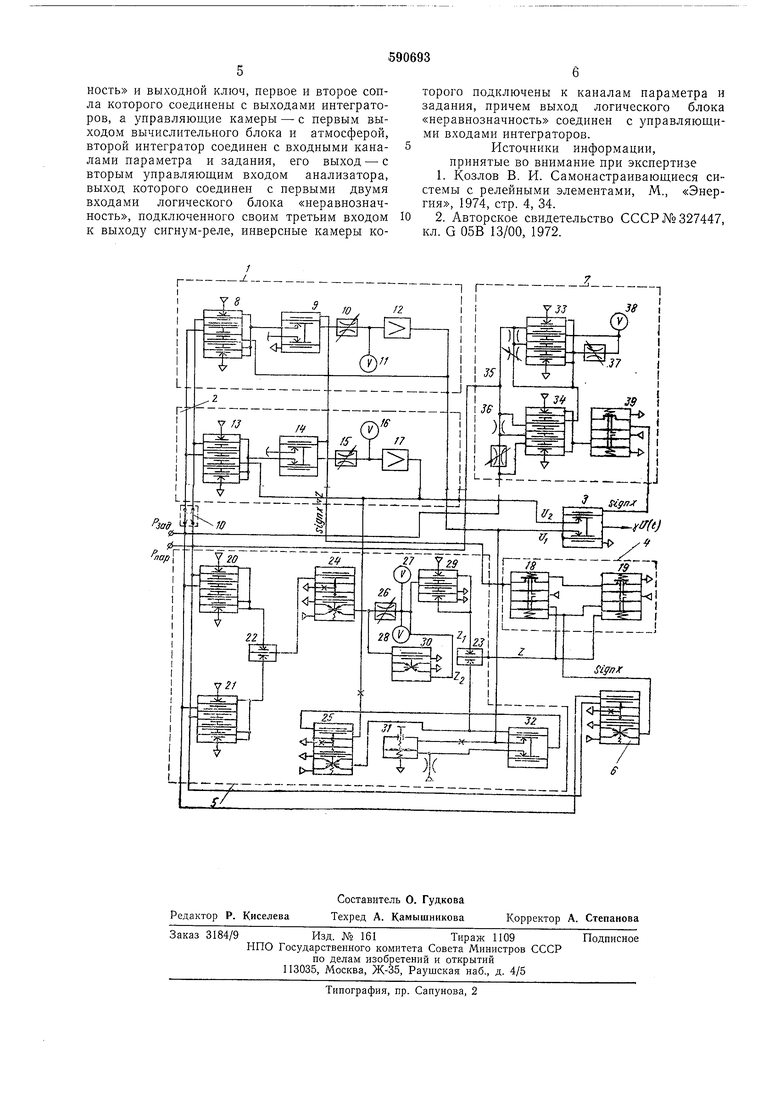
Поставленная цель достигается тем, что в нем установлены второй интегратор, сигнумреле, логический блок «неравнозначность и выходной ключ, первое и второе сопла которого соединены с выходами интеграторов, а управляющие камеры - с первым выходом вычпслительпого блока и атмосферой, второй интегратор соединен с входными каналами параметра и задания, его выход - с вторым управляющнл входом анализатора качества, выход которого соединен с первыми двумя входами логического блока «неравнозначность, подключенного своим третьим входом к выходу сигнум-реле, инверсные камеры которого подключены к каналам параметра и задания, причем выход логического блока «неравиозпачность соединен с управляющими входами интеграторов. На чертеже представлена схема регулятора.
Регулятор содержит два интегратора 1, 2, выходной ключ 3, логнческнй блок «неравнозначность 4, аналнзатор 5, сигнум-реле 6, вычислительный блок 7. Входы интеграторов 1, 2 соедииены с входными каналами параметра Рпар и задання Рзад.
Интегратор 1 включает пят1 мембранный элемент сравнения 8, ключ 9, переменный дроссель 10, емкость И и усплитель мощности 12. Интегратор 2 выполнен аналогично и состоит из пятнмембранного элемента 13, ключа 14, переменного дросселя 15, емкости 16 и усилителя мощности 17. Логический блок 4 «неравнозначность выполнен на реле 18 п 19. В качестве сигнум-реле 6 использ)ется
дискретный элемент сравнения.
Анализатор 5 содержит два пятимембранных элемента сравнения 20 и 21, два логических элемента «ИЛИ 22 и 23, два дискретных элемента сравнения 24 и 25, переменный дроссель 26, емкости 27 и 28, трехмембранное реле 29, элемент «НЕ 30, повторитель со сдвигом 31 и ключ 32.
Вычислительный блок 7 состоит из двух пятимембранных элементов сравнения 33 и 34, двух дроссельных сумматоров 35 и 36, переменного дросселя 37, емкости 38 и ключа 39.
Регулятор работает следующим образом.
Сигналы, пропорциональные заданному и текущему значениям регулируемой величины, поступают на входы элементов сравнения 8 и 13, работающих в зависимости от положения ключей 9 и 14, управляемых логическим блоком 4, попеременно в режимах интегрирования и запоминания.
Работа блока 4 зависит от значения сигнала 7, вырабатываемого анализатором 5, и сигнала, формируемого сигнум-реле 6. При автоколебательном режиме (стационарное состояние системы) выход анализатора 5 равен О и работа логического блока 4 определяется знаком функции slgnx.
Если sign , элемент сравнения 8 подключается через ключ 9 к инерционному звену «дроссель-емкость (элементы 10, И) и в интеграторе 1 производится операция интегрирования ошибки
fi+i
у,-.
i
Одновременно элемент сравнения 13 отключается посредством ключа 14 от инерционного звена (элементы 15, 16) и с выхода интегратора 2 будет сниматься фиксированное значение интеграла . Если sign , в интеграторе 1 будет производиться запоминание предыдущего значения интеграла, а в интеграторе 2 - интегрирование. Таким образом, в автоколебательном режиме нри такой последовательности формирования зфовней Ui и Uz разность их значений будет непрерывно уменьшаться до определенного значения, задаваемого анализатором 5.
При срыве автоколебаний или уменьшении разности уровней f/i и Uz ниже задаваемого значения, анализатор 5 отрабатывает сигнал, равный 1, в блок 4, на выходе которого будет формироваться инвертированный сигнал sign X, и режимы работы интеграторов 1, 2 поменяются на обратные, разность значений уровней будет увеличиваться, в результате регулятор снова вводится в автоколебательный режим с последующим уменьшением амплитуды колебаний.
Анализатор 5 слзжит для анализа автоколебаний, поступающих на его вход.
Элементами 20, 21, 22 определяется модуль, поэтому схемы подключения элементов 20 и 21 выбраны различными. Значение модуля поступает через элемент 24 на инерционное
звено (элементы 26, 27, 28), служащие фильтром для пропускания низкочастотиой составляющей определенного уровня, при котором происходит срыв автоколебаний. Настройка фильтра на определенный уровень производится дросселем 28. Реле 29 с элементом 30 формирует дискретный сигнал 7, равный «О при наличии автоколебаний и срыве, поступающий на элемент 23, связанный с выходом анализатора 5.
Элементы 25, 31, 32 ограничивают величину разности уровней f/i и Uz не ниже некоторого фиксированного значения, задаваемого элементом 31, и формируют дискретный сигнал Zz, равный «О, если разность уровней t/i и f/2 не превышает заданную и «1 - если эта разность становится ниже заданной. Сигнал Zz поступает через элемент 23 на выход анализатора 5.
В вычислительном блоке 7 реализуется операция
Рпар jf (рР
--- -f- А пap - -г зад;Сформированные блоками 1, 2 в определенной последовательности уровни f/j и t/a релейной характеристики поступают па вход выходного ключа 3, такт работы которого определяется знаком фуикции sign к, вырабатываемой блоком 7.
Формироваиие выходного сигнала производится по следующему закону
U(f) - 1 (+) sign л; О U.,(ti, если signA: 0.
Регулятор дает хороший результат при использовании его в системах автоматического управления колебательными технологическими процессами, в которых нри уменьшении амплитуды колебапия частота увеличивается. В САУ неколебательными технологическими процессами на низких частотах возможно состояние 7.1, если не подобрать с запасом сопротивление переменного дросселя 26.
Эффективность предложенной системы при обработке сложных входных воздействий при управлении колебательными объектами заключается в том, что при частом воздействии на систему больших возмущений устройство способно их скомпенсировать за счет наличия двух уровней, образ тощих управляющее воздействие.
Формула изобретения
Пневматический самонастраивающийся регулятор, содержащий анализатор и первый интегратор, подключенные к входным каналам параметра и задания, вычислительный блок, входы которого подключены к входным каналам параметра и задания, выход первого интегратора соединен с первым управляющим входом анализатора, отличающийся тем, что, с целью увеличения быстродействия регулятора, в нем установлены второй интегратор, сигнум-реле, логический блок «перавнозначность и выходной ключ, первое и второе сопла которого соединены с выходами интеграторов, а управляющие камеры - с первым выходом вычислительного блока и атмосферой, второй интегратор соединен с входными каналами параметра и задания, его выход - с вторым управляющим входом анализатора, выход которого соединеп с первыми двумя входами логического блока «неравнозначность, подключенного своим третьим входом к выходу сигнум-реле, инверсные камеры которого подключены к каналам параметра и задания, причем выход логического блока «неравнозначность соединен с зПравляющими входами интеграторов.
Источники информации, принятые во внимание при экспертизе
1.Козлов В. И. Самонастраивающиеся системы с релейными элементами, М., «Энергия, 1974, стр. 4, 34.
2.Авторское свидетельство СССР №327447, кл. G 05В 13/00, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Пневматическое регулирующее устройст-BO | 1978 |
|
SU802920A1 |
| Пневматический регулятор с переменной структурой | 1976 |
|
SU640254A1 |
| Пневматическое регулирующее устройство | 1979 |
|
SU868703A1 |
| Пневматическое управляющее устройство | 1977 |
|
SU691807A1 |
| Система автоматического управления двухсвязным объектом | 1983 |
|
SU1158973A1 |
| Экстремальный регулятор режима обработки на металлорежущих станках | 1980 |
|
SU1015338A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2391691C1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Пневматический адаптивный регулятор | 1977 |
|
SU656022A1 |
