I
Изобретение относится к автоматике и может .быть использовано в различных прецизионных цифровых системах регулирования и управления.
Известные устройства 1, основанные на использовании аналоговой техники, не обеспечивают достаточной точности и надежности в широком темпера.турном диапазоне, а основанные на дискретной технике достаточно сложны в аппаратурном отношении.
Наиболее близко по технической сущ;ности к предлагаемому устройству .следящий привод 2, содержащее задатчик, выход которого соединен с одними входами сумматора, исПойНйтёл Ьный блок, кинематически связанный с объектом и датчиком положения, выходы которого соединены с другими входами сумматора.
Недостатками известного устройства являются аппаратурная сложность, совместное применение аналоговых и цифровых средств, средств их сопряжения (цифроаналоговые преобразователи) , недостаточная надежность в широком температурном диапазоне в связи с наличием аналоговых средств
Цель изобретения заключается в упрощении устройства д.пя приведения объекта в заданное положение и в повышении надежности его работы.
Поставленная цель достигается тем, что устройство для приведения объекта взаданное полбженйе содержит элемент (п+1)И-2ИЛИ-НЕ, первый элемент 2И-НЕ, второй элемент 2И-НЕ, первый выход сумматора соединен с первым входом элемента (п+1)И-2ИЛИ-НЕ и через первый элемент 2И-НЕ с первым входом исполнительного блока, второй выход - с вторым входом элемента (п+1)И-2ИЛИ-НЕ и через второй элемент 2И-НЕ с вторым входом исполнительного борка, а остальные выходы сумматора связаны с соотвётстйующими входами элемента (п+1)И-2ИЛИ-НЕ, выход которого подключен к вторым входам первого и,второго элементов 2И-НЕ.
В устройство введены также первый и второй преобразователи код - код.
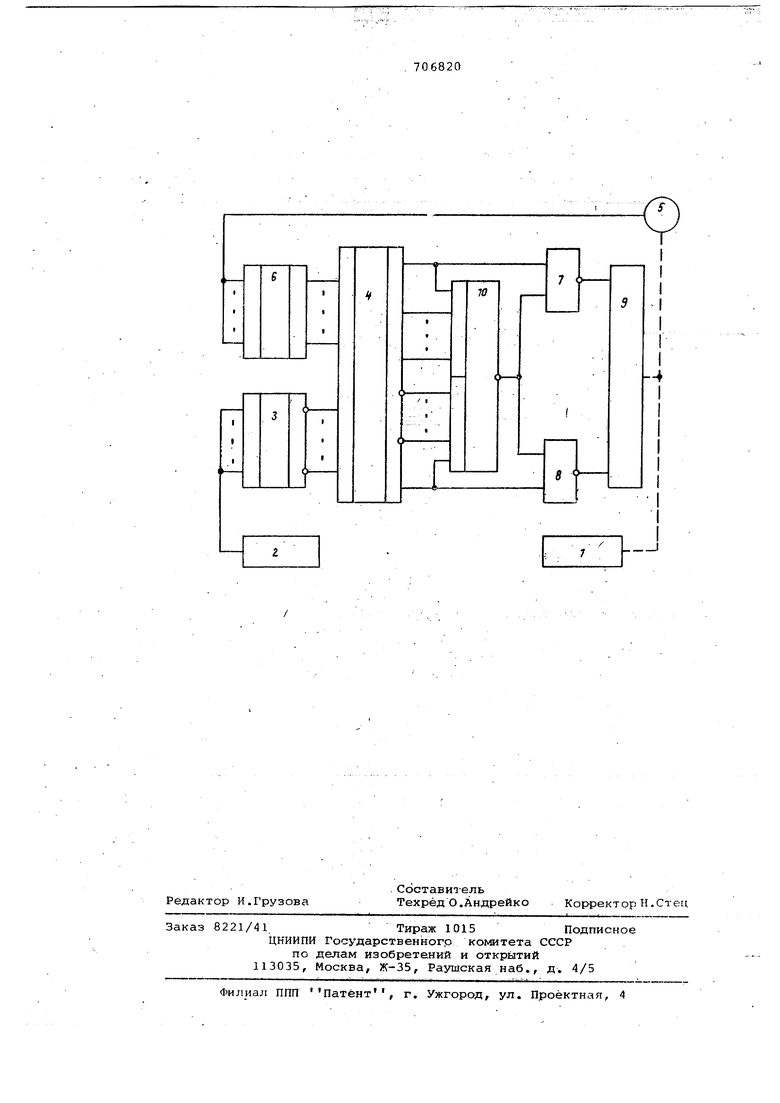
На чертеже изображена функциональная схема устройства.
Она содержит объект 1, блок 2 задания положения объекта (за.Цс1тчик) , связанный через преобразователь 3 .код-код о входами сумматора 4,другие; входы KOTov oro соединены с датчиком положения объекта через преобразователь 6 код-код.Прямой и инверсный вы ход переноса сумматора 4 подключены К входам первого 7 и второго 8 элеме тов 2И-НЕ, выходы которых связаны с исполнительным блоком 9. Вторые вхо ды элементов 2И-НЕ 7 и 8 соединены с выходсэм; элемента (n-fl) И 2ИЛИ-НЕ 1 входы которого связаны определе нным образом с выходаг м сумматора 4. Работает устройство следующим , образом. Координаты объекта 1, задаваемые блоком 2 задания положения объекта
Разряды
N
N,
в случав несовпадения координат NO, и N-J. знак несовпадения и направле ние перемещения объекта 1 определяет ся единйчньгм уровнем сигналрв перено са Р или Р, поступающим через расрещенные элементы 2И-НЕ 7 или 8 на исполнительный блок 9. Исполнительный, блок 9 начинает перемещение объекта 1 в положение NT,. При совпадении координат N-J, и N-, определяемых элементом (п+1) И-2ИЛИ-НЕ 10, по совпадению единичных уровней с прямых или инверсных выходовразрядов сумматора 4 с инверсным Р или прямым Р выходом сигнала переноса исполнительный блок 9 блокируется запрещающим потенциалом, поступающим с выход элемента (п+1) И-2ИЛИ-НЕ 10 на вторы входы элементов 2И-НЕ 7 и 8. Использование изобретения позволяет аппаратурно упростить устройств для приведения объекта в заданное положение и, как следствие, повысить надежность его работы. Упрощение достигается за счет того, чтов сумматоре отсутствуют знаковые разряды и выходные цепи, переключения в зависимости .от знака и абсолютной величи ньГйычнт аёмьах чисел, схема анализа использует элемент (п+1) И-2ИЛИ-НЕ вместо И элем/ентов исключающее ИЛИ , объединённых по выходу. , Формула изобретения 1.Устройство для приведения объек та в заданное положение, содержащее задатчик, выход которого соединен с одними входагад суйматЬра,испрлнитёл
N- NT
N
2 2
2 2
010 1 о 1 001
о
1 1- -1 в нйкстором цнфрорс.м :с1.)де, про. образ ются преобразовг j;cM 3 код - код в стандартный двоичный код Мэ, инверсное значение которого N поступает на входы второго числа сумматора 4. Координаты текущего положения объекта 1, всспринимаег-ые датчиком 5 положения объекта и выдаваемые в некотором цифровом коде, преобразуются преобразователем 3 в стандартный двоичный код N , поступающий на входы первого числа сумматора 4. В зависимости от соотношения кодов N,j и N i на вьгеодах сумматора 4 возможны три характерных случая: ный блок, кинематически-связанный с Объектом и датчиком положения, выходы которого соединены с другими входами сумматора, отли.чающеес. я тем, что, с целью повышения-надёжности устройства, оно содержит элемент (п+1)И-2ИЛИ-НЕ, первый элемент 2И-НЕ, второй элемент 2И-НЕ, первый выход сумматора соединен с первым входом элемента (п+1)И-2ИЛИ-НЕ и через первый элемент 2И-Hfc с первым входом исполнительного блока, второй выход -С вторым входом элемента (п+1)И-2ИЛИ-НЕ и через второй элемент 2И-НЕ с вторым входом исполнительного блока, а остальные выходы сумма-, тора соединены с соответствующими входами элемента (п+1)И-2ИЛИ-НЕ, выход которого соединен с вторыми входами первого и второго элементов 2И-НЕ. 2. Устройство по П.1, отличающ е ее я тем, что, с целью расщирения функциональных возможностей устройства, оно содержит первый и второй преобразователи код - код, выход задатчика через первый преобразователь код - код соединен с одними входами сумматора, а выход датчика положения через второй преобразователь код - код с другими входами сумматора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР №541143, кл. G 05 В 11/26, 1975. 2.Авторское свидетельство СССР №546853, кл. G 05 В 11/12, 1975 (протОтип). .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приведения объектаВ зАдАННОЕ пОлОжЕНиЕ | 1979 |
|
SU830297A2 |
| Устройство для приведения объекта в заданное положение | 1981 |
|
SU999013A1 |
| Цифровой привод | 1981 |
|
SU987574A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |
| Устройство для симметрирования токов трехфазных четырехпроводных сетей | 1990 |
|
SU1758773A1 |
| Система управления положением телескопа | 1975 |
|
SU681418A1 |
| РАДИАЦИОННЫЙ ТОЛЩИНОМЕР ПОКРЫТИЙ | 1988 |
|
SU1805736A1 |
| Устройство индикации и управления для станков | 1985 |
|
SU1287112A1 |
I
