(.54) ЦИФРОВОЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приведения объекта в заданное положение | 1981 |
|
SU999013A1 |
| Устройство для приведения объекта в заданное положение | 1978 |
|
SU706820A1 |
| Устройство для приведения объектаВ зАдАННОЕ пОлОжЕНиЕ | 1979 |
|
SU830297A2 |
| Цифровая система для программного управления | 1984 |
|
SU1228075A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1986 |
|
SU1348774A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Устройство для измерения глубины модуляции амплитудно-модулированных сигналов | 1982 |
|
SU1023256A1 |
| Устройство для регулирования температуры | 1986 |
|
SU1403025A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| Система позиционного управления | 1985 |
|
SU1247832A1 |
Изобретение относится к автоматике и может выть использовано в различных прецизионных цифровых системах регулирования и управления.
Известно устройство для приведения объекта в заданное положение, содержащее задатчик, блок сравнения и исполнительный двигатель, вал которого связан с объектом управления и датчиком обратной связи, выходкоторого подключен к входу блока сравнения 13.
Недостатком этого устройства является сложность конструкции, что приводит к уменьшению надежности его работы.
Наиболее близким к изобретению по технической сущности является цифровой привод, содержащий последовательно соединенные, з-адатчик, первый преобразователь код - код и сумматор, прямой и инверсный выходы переноса которого через первый и второй элементы И-НЕ подключены соответственно к первому и второму входам исполнительного блока,кинематически связанного с объектом управления и датчиком положения, выход которого через второй преобразователь
;код - КОД соединен с вторыми входами сумматора 2. :
Недостатком известного привода являются сложность и, следовательно, низкая надежность.
Целью изобретения является упро щение привода и повышение его надежности.
Указанная цель достигается тем,
10 что в привод введен третий .элемент И-НЕ, входы которого подключены к разрядным выходам сумматора, а выход - к вторым входс1м первого и второго элементов И-НЕ.
15
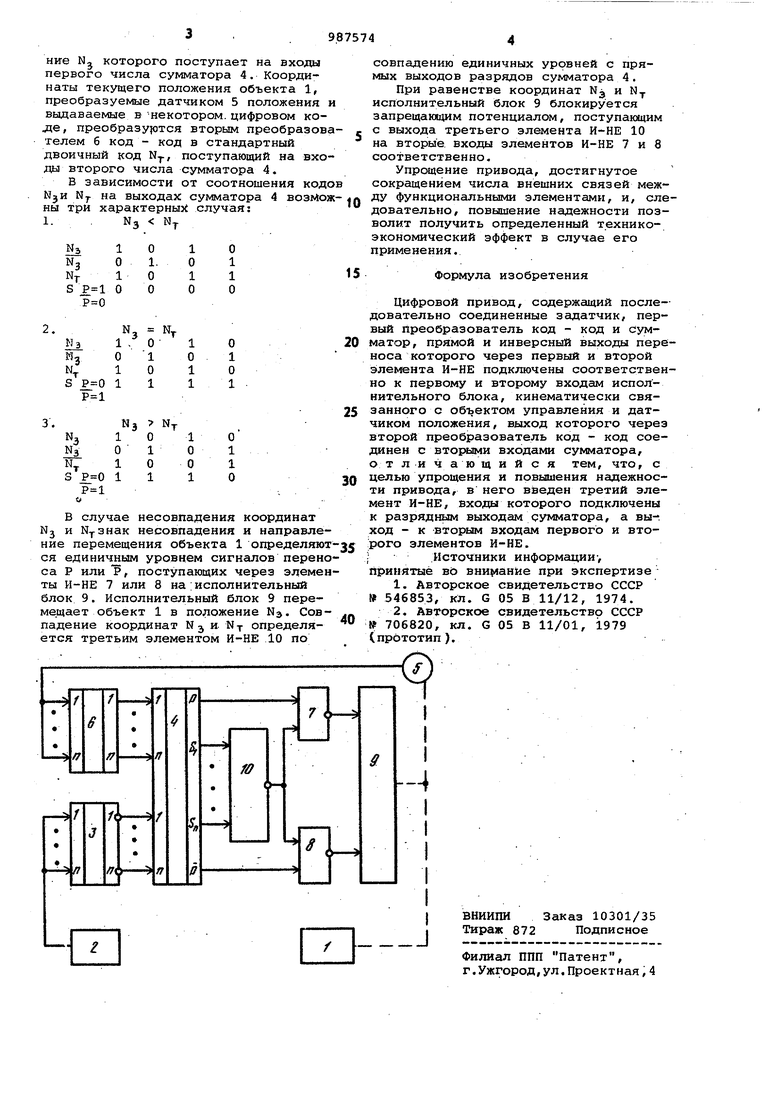
На чертеже приведена функциональная схема привода.
Привод содержит объект 1 управления, задатчик 2, первый преобразователь 3 код - код, сумматор 4, дат20чик 5 положения, второй преобразова тель 6 код - код, первый и второй элементы. И-НЕ V и 8, исполнительный блок 9 и третий элемент И-НЕ 10.
Цифровой привод работает следую25щим образом.
Координаты объекта 1, задаваемые задатчиком 2 в некотором цифровом коде, преобразуются первым преобразователем 3 код - код в стандартный
30 двоичный код NJ , инверсное ЭН&чение Nj которого поступает на входы первого числа сумматора 4. Координаты текущего положения объекта 1, преобразуемые датчиком 5 положения выдаваемые в -некотором, цифровом коде, преобразу}отся вторым преобразов телем 6 код - код в стандартный двоичный код N, поступающий на вхо даа второго числа сумматора 4. В зависимости от соотношения код NJ. на выходах сумматора 4 возмо ны три характерных случая: 1. . N3 N в случае несовпадения координат Nj и N-рЗнак несовпадения и направле ние перемещения объекта 1 определяю ся единич21ым уровнем сигналов перен са Р или Р, поступающих через элеме ты И-НЕ 7 или 8 на:исполнительный блок 9. Исполнительный блок 9 переме.щает объект 1 в положение Nj. Сов падение координат N и. NT определяется третьим элементом И-НЕ 10 по совпадению единичных уровней с прямых выходов разрядов сумматора 4. При равенстве координат N и Ny исполнительный блок 9 блокируется запрещаю1дим потенциалом, поступающим с выхода третьего элемента И-НЕ 10 на вторые, входы элементов И-НЕ 7 и 8 соответственно. Упрощение привода, достигнутое сокращением числа внешних связей между функциональными элементами, и, следовательно, повышение надежности позволит получить определенный техникоэкономический эффект в случае его применения. Формула изобретения Цифровой привод, содержащий последовательно соединенные задатчик, первый преобразователь код - код и сумматор, прямой и инверсный выходы переноса которого через первый и второй элемента И-НЕ подключены соответственно к первому и второму входам исполнительного блока, кинематически связанного с объектом управления и датчиком положения, выход которого через второй преобразователь код - код соединен с втоЕЯлми входами сумматора, от ли ч а ю щ и и с я тем, что, с целью упрощения и повьашения надежности привода, внего введен третий элемент И-НЕ, входы которого подключены к разрядным выходам сумматора, а вы-. ход - к вторым входам первого и второго элементов И-НЕ. I Источники информации-, п| инятыё вй внимание при экспертизе 1.Авторское свидетельство СССР 546853, KJI. G 05 В 11/12, 1974. 2.Авторское свидетельство СССР №706820, кл. G 05 В 11/01, 1979 (прототип).
