Изобретение относится к автоматике и может быть использовано в разп личных цифровых системах регулирования и управления. ..
Известны устройства для приведения объекта в заданное положение, содержащее исполнительный блок и датчик .
Недостатками этих устройств являются сложность схемных решений и низкая надежность, а также односкоростное управление перемещением объекта.
Наиболее близким техническим решением к изобретению является устройство для приведения объекта в заданное . положение, содержащее задатчик, выход которого через второй преобразог ватель код - код соединен с вторыми входа ми сумматора, исполнител1.ный блок,; кинематически связанный с объектом и датчиком положения, выходы которого соединены через первый преобразователь код - код с первыми входами сумматора, первый и второй входы исполнительного блока соединены соответственно с выходс1ми первого, и второго элементов 2И-НЕ, первый и второй входы которых соединены соответственно с инверсным и прямым выходами переноса сумматора 2.
Недостатками этого устройства являются:
1. Большое время установки объекта в заданное положение. Так как в данном устройстве переход с большей скорости установки объекта на малую происходит при появлении единичного уровня на выходе элемента (n-m+1) И-2ИЛИ и наличии единичного уровня в m младших разрядах на выходе сумматора, совпадающего с первым младшим единичным уровнем в коде, задающем порог перехода на малую скорость (реализовано на элементе 2И-2т ИЛИ). Следовательно, переход на малую скорость в устройстве происходит только при порогах, установленных из следующего ряда дискретов, относительно положения N J
, .
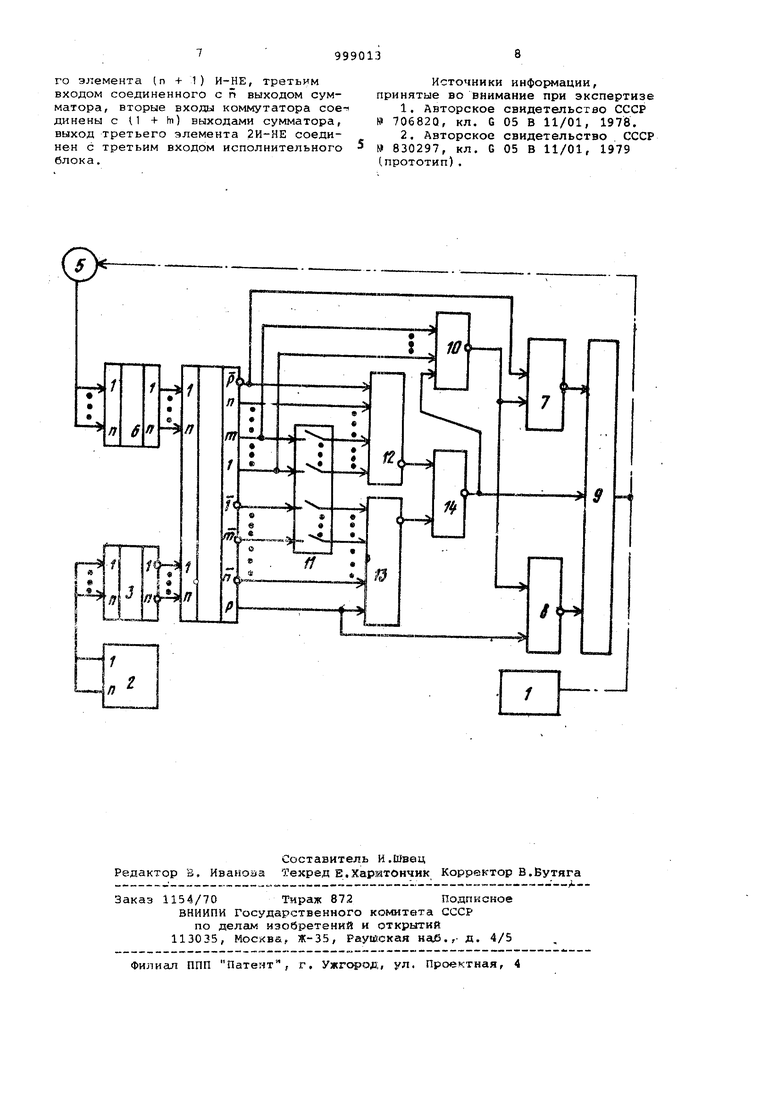
где к 0,1,2,3, ...(m-l) . То есть, наличие единичного уровня в младшем разряде кода, задающего порог пере- i хода на малую скорость Nj,), соответствует, порогу перехода на.малую скорость () младших разрядов,наличие единичного уровня в старшем разряде ()младших разрядов,относительно положения Нз. Но для минимизации cyNp/inpHoro времени (.2} уста новки о(1ъекта в заданное положение, время П2реме цсння объекте с большой cKopOLTbio ( t ) должно быть максималь ным, п время пере.ме цения объекта с малой с:коростыо (t ) - минимальным, + t 2 mi n/ где Zini-i м -Гиимально необходимое время движеьия объекта с малой скоростью исключения перерегулирования и реверсирования объекта. Так как в известном устройстве возможно установить порог перехода на малую скорость только из ряда дискретов , то для исключения перерегулирования и реверсирования объекта величина порога должна быть задана больше минимально необходимого,, относительно N g . При этом уменьшается время движения объекта с большой скоростью и увеличивается время движения объекта с малой скоростью,А это приводит к увеличению суммарного времени движения объекта из N в Ы по сравнению с минимально возможным 2. Недостатками известно-о устрой ства являются также сложность схемного решения и низкая надежность. Цель изобретения - увеличение быстродействия при одновременном упрощении схемного решения и повьЕиении надежности работы устройства. Поставленная цель достигается тем что в устройство для приведения объекта в заданное положение, содер жащее задатчик координат, выходом соединенный через первый преобразователь ход - код с первыми входами сумматора, исполн1; ельный блок , кине матически связанный с объектом и датчиком положения, выходы которого через второй преобразователь код код соединены с вторыми входами сум матора, первы- и второй входы исполнительного блока подк почены соответственно к выходам первого и второго элементов 2И-НЕ, первые входы которых соединены соответствен.ю с инверсным и прямым входами переноса сумматора, введены первый элемент (п+ 1) И-НЕ и последовательно соединенные коглмутатор, второй элемент ,п + 1) И-НЕ, третий элемент 2И-НЕ и элемент (гл-И ) И-НЕ, выходом соеди ненныг с вторым входом первого и вт рого элементов 2И-НЕ, вторые входы элемента (т+1) И-НЕ соединены с m в ходами сумматора и первЕз1ми входами коммутатора, вторые выходы которого через первый элемент 1 п + 1 ) И-IiE по ключены к второму входу третьего эл мента 2И-НЕ, вторые входы первого элемента (п + ) И-НЕ соединены с П-гг выходами сумматора, а третий вход - с инверсным р выходом парено са сумглатора, n-m выходы которого подключены к вторьом входам второго элемента (п 1) И-НЕ, третьим аходом соединенного с п выходом Сумматора, выход третьего элемента 2И-НЕ соединен с третьим входом .1сполнительного блока, вторые входы коммутатора соединены (ип) выходами сумматора , На чертеже представлена функциональная схема предлагаемого устройства. Устройство состоит из объекта 1, задатчика координат 2, первого преобразователя код - код 3, сумматора 4, датчика положения 5, второго преобразователя код - код 6, первого элемента 2И-НЕ 7, второго элемента 2И-НЕ 8, исполнительного блока 9, элемента (т -t- I) И-НЕ 10, коммутатора 11-, первого элемента (п -)- 1) ИНЕ 12, второго элемента (п-и . 1 ) ИНЕ 13, третьего элемента 2И-НЕ 14. Устройство работает следующим образом. Координаты объекта 1, задаваемые задатчиком 2 в некотором цифровом коде, преобразуется преобразователем 3 код - код в стандартней двоичный код NJ, инверсное значение которого Ng поступает на входы второго числа cyMT/iaxopa 4, Координаты текущего положения объекта 1 воспринимаются датчиком 5 положения объекта 1 и, выдаваемое в некотором цифровом коде,преобразуются преобразователем б код -код в стандартный двоичный код М, поступающий на входы первого числа сумматора 4. В зависимости от соотношения кодов NjH Ny на выходах сумм тора 4 возможны пять характерны: случаев: В случае несовпадения координат N знак несовпадения и направле ние перемещения объекта 1 определяе ся единичным уровнем сигналов парен са Р или Р, поступающим через элеме ты 2И-НЕ 7 и 8 в исполнительный бло 9, который с большой скоростью начи нает перемещение объекта 1, уменьша рассогласование до положения N Nj., Величина порога перехода на малую скорость может быть установлена про извольной в поеделах от одного до 2 дискретов, с точностью - 1/2 младшего разряда, подключением через ко мутатор 11 на входы элементов ( 1 И-НЕ 12 и 13 соответствующих выходо сумматора 4 или постоянного единичного уровня. Те из гп младших разрядов выходов сумматора 4, которым в коде соответствует единичные уровни подключаются через коммутатор 11 к входам элементов (п + 1) и-НЕ 12 и 13, на остальные входы элементов (п + 1) И-НЕ 12 и 13 через коммутатор 11 подключается постоянный единичный уровень. Цепь постоянного ед ничйого УРОВНЯ условно не показана. Совпадение кодов N и N определяется, как совпадение единичных уровней на входах элементов (п + 1) И-НЕ 12 или 13 и появлением единичного уровня на выходе элемента 2ИНЕ 14, исполнительный блок 9 перево дится на малую скорость, продол кая перемещение объекта к заданному поло жению. При совпадении координат N-p, определяемом по совпадению единичных уровней на входах элементов (п+1) И-НЕ 12 или 13, а также на входах элемента (т + 1) И-НЕ 10, исполнительный блок 9 блокируется запрещающим потенциалом, поступающим с выхода элемента (т+ 1) И-НЕ 10 на входы элементов 2И-НЕ 7 и 8. Цикл отработки заданного положения окончен. По сравнению с известным устройст вом использование изобретения позволяет увеличить быстродействие устрой ства, т.е. уменьшить время установки объекта в заданное положение.Так как порог перехода на малую скорость движения объекта N может быть установлен произвольным в пределах разрядов с точностью ± 1/2 младшего разряда, т.е. минимальный порог,необходимый для исключения перерегулирования и реверсирования объекта.При этом суммарное время установки объек та будет минимально, так как выполняется условие ImaxV. Учитывая свойства ряда (2 -2-), где к 0,1,2,3,...(т -1), очевидно что разность между t2 известного уст ройства и tj предлагаемого технического решения будет увеличиваться при увеличении порогов, которые в свою очередь при больших соотношениях скоростей, малой величине младшего разряда, инерционности объекта и др. могут быть большими. Упрощение и повышение надежности устройства достигается за счет того) что в нем отсутствуют m внешних связей, соединяющих m выходных инверсных младших разрядов сумматора с m входами элемента (т+1) И-2ИЛИ, отсутствуют две связи, соединяющие выходы сумматора (Р и Р ) с входами элемента (п+1) И-2ИЛИ НЕ, а также в схеме анализа отсутствует триггер. Причем устройство в схеме анализа содержит по сравнению с известнык устройством: а) коммутатор (2т входов и 2т выходов) - блок задания порогов второй скорости (2т входов и 2т выходов), б) два элемента (п+1) И-НЕ и элемент 2И-НЕ (общее количество входов 2п. + 4) -элементы (m+l) И-2ИЛИ, (n-m+1) И-2ИЛИ и элемент 2И-НЕ 1общее количество входов 2п + 4), в) элемент (т + 1) И-НЕ (т + .1 вход) - элемент 2И-2 ИЛИ (4т входов). изобретения Устройство для приведения объекта в заданное положение, содержащее задатчик координат, выходом соединенный через первой преобразователь код код с первыми входами сумматора, исполнительный блок, кинематически связанный с объектом и датчиком положения, выходы которого через второй преобразо :атель код - код соединены с вторыми входами сумматора, первый и второй входы исполнительного блока подключены соответственно к выходам первого и второго элементов 2И-НЕ, первые входы которых соединены соответственно с инверсным (Р ) и прямым Р)выходами переноса сумматора, о тличающееся тем, что, с целью увеличения быстродействия и надежности с одновременным упрощением схемы, в него введены первый элемент (п+.1) И-НЕ И последовательно соединенные коммутатор, второй з.лемент (п+1) И-НЕ, третий элемент 2И-НЕ и элемент (т + 1). И-НЕ, выходом соединенный с вторым входом первого и второго элементов 2И-НЕ, вторые входы элемента (т + 1) И-НЕ соединены с m выходами сумматора и первыми входами коммутатора, вторые выходы которого через первый элемент (п + 1) И-НЕ подключены к второму входу третьего элеменА-а 2И-НЕ, вторые входы первого элемента .(п + 1) И-НЕ соединены с n-m выходами сумматора, а третий вход - с инверсным Р выходом, переноса сумматора,n-m выходы которого подключены к вторым входам второго элемента (п +1) И-НЕ, третьим входом соединенного с п выходом сумматора, вторые входы коммутатора сое-я динены с 1.1 + hi) выходами сумматора, выход третьего элемента 2И-НЕ соединен с третьим входом исполнительного блока.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 70682Q, кл. G 05 В 11/01, 1978.
2.Авторское свидетельство СССР 830297, кл. G 05 В 11/01, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приведения объектаВ зАдАННОЕ пОлОжЕНиЕ | 1979 |
|
SU830297A2 |
| Цифровой привод | 1981 |
|
SU987574A1 |
| Устройство для приведения объекта в заданное положение | 1978 |
|
SU706820A1 |
| Скалярный умножитель векторов | 1988 |
|
SU1619254A1 |
| Фазовращатель | 1986 |
|
SU1406514A1 |
| Устройство вычисления функции @ @ с исправлением ошибок | 1984 |
|
SU1288690A1 |
| Генератор псевдослучайных последовательностей | 1984 |
|
SU1228236A1 |
| Устройство для деления нормализованных чисел | 1985 |
|
SU1290302A1 |
| Устройство для деления чисел | 1985 |
|
SU1287149A1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ПОРЯДКА ПРИ НОРМАЛИЗАЦИИ ЧИСЕЛ | 2017 |
|
RU2638724C1 |
