1Изобретение относится к автоматизации технологического оборудования, в частности металлорежущих станков, работшощих с участием оператора.
Цель изобретения - повышение про- изводительности оператора за счет автоматизации определения направления перемещения рабочего органа станка и значений упреждений останова при позиционировании.
На фиг.1 представлена блок-схема устройства индикации и управления; на фиг.2 структурная схема преобразователя; на фиг.З - диаграм1-1а работы этого блока; на фиг.4 г- структур- нал схема блока сравнения координат; на фиг.5 - структурная схема вычислительного блока.
Устройство (фиг.о содержит блок 1 задания программ, датчик 2 обратной связи, второй задатчик 3 (задат- чик упреждений), преобразователь 4, блок 5 сравнения координат, цифровое табло 6з блок 7 индикации (блок отоб ражения указаний оператору), вычислительный блок 8, первый задатчик 9 (задатчик направления отсчета) и исполнительный орган 10 станка.
Преобразователь (фиг.2) включает первый усилитель 11 и второй 12 усилитель, инвертор 13, первый 14 и второй 15 фазоделители, первый 16 и второй 17 триггеры Шмидта, третий 18 и четвертый 19-инверторы, первый 20, .второй 21, третий 22 и четвертый 23, формирователи, блок 24 элементов И первый выходной усилитель 25 и вто- рой выходной усилитель 26. . .
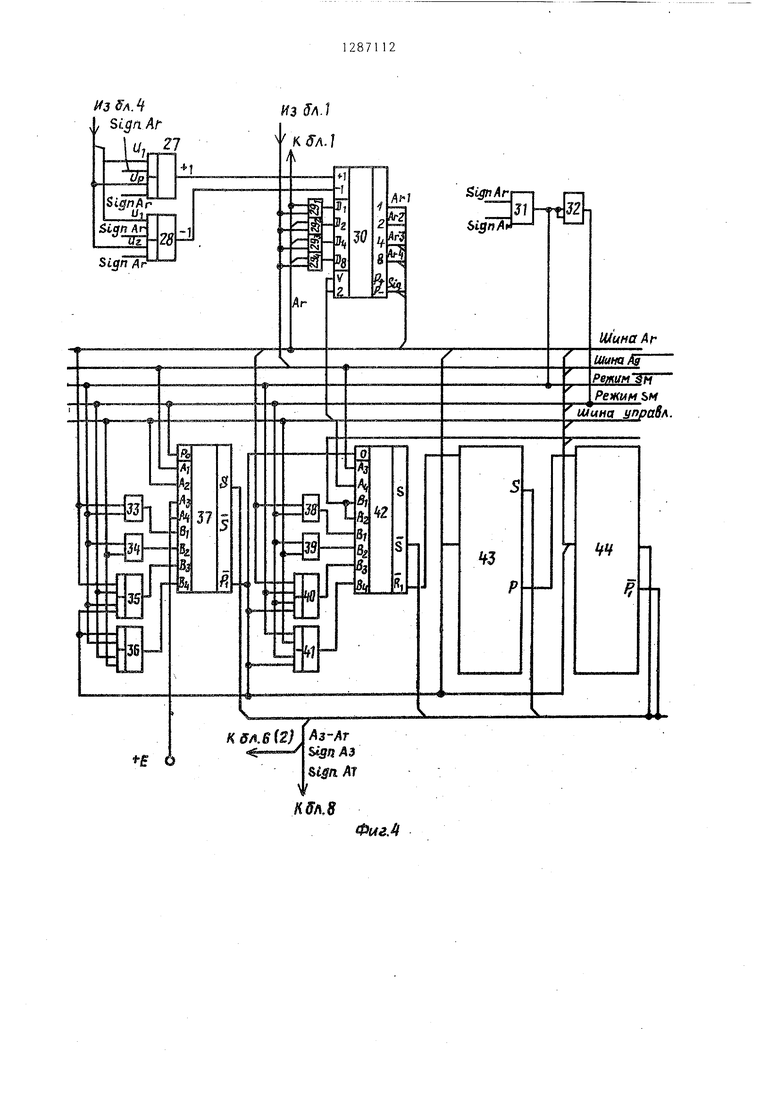
Блок сравнения координат (фиг.4) содержит первый 27 и второй 28 элементы 2И-2ИЛИ-НЕ, первые элементы 2И-НЕ 29//, счетчик 30 импульсов элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 31, второй элемент 2И-НЕ 32, первьй 33 и второй 34 элементы 2И, третий 35 и четвертый 36 элементы 2И-2ИЛИ-НЕ, первый сумматор 37, третий 38 и четвертый 39 элементы 2И, пятый 40 и шест той 41 элементы 2И-2Ш1И-НЕ, второй 42, третий 43 и четвертый 44 сумматоры.
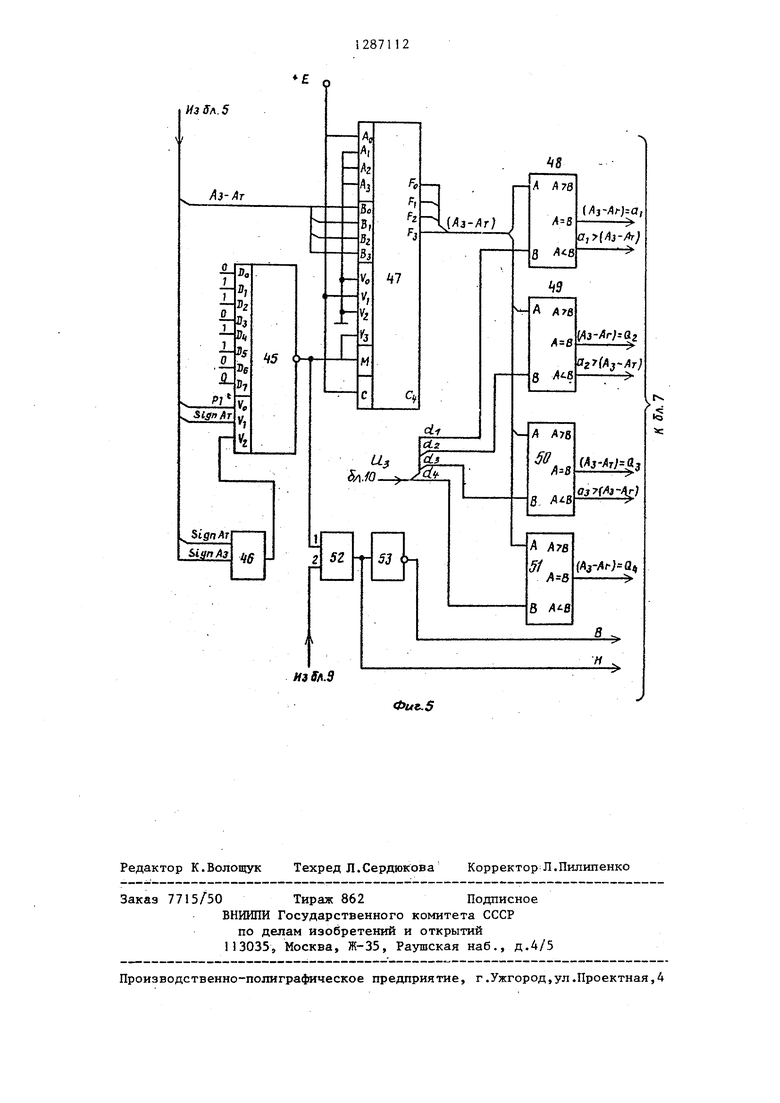
Вычислительньш блок (фиг.5) имеет коммутатор 45, первый элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 46, арифметико-логический узел 47, первый 48, второй 49, .третий 50 и четвертый 51 элементы сравнения, инвертор 52 и второй элемент 53 ИСКЛЮЧАЮЩЕЕ ИЛИ.
1 122
В качестве датчика 2 обратной связи используется линейньй (или круговой) импульсный измерительный преобразователь, связанный с рабочим органом (столом, бабкой и пр.).
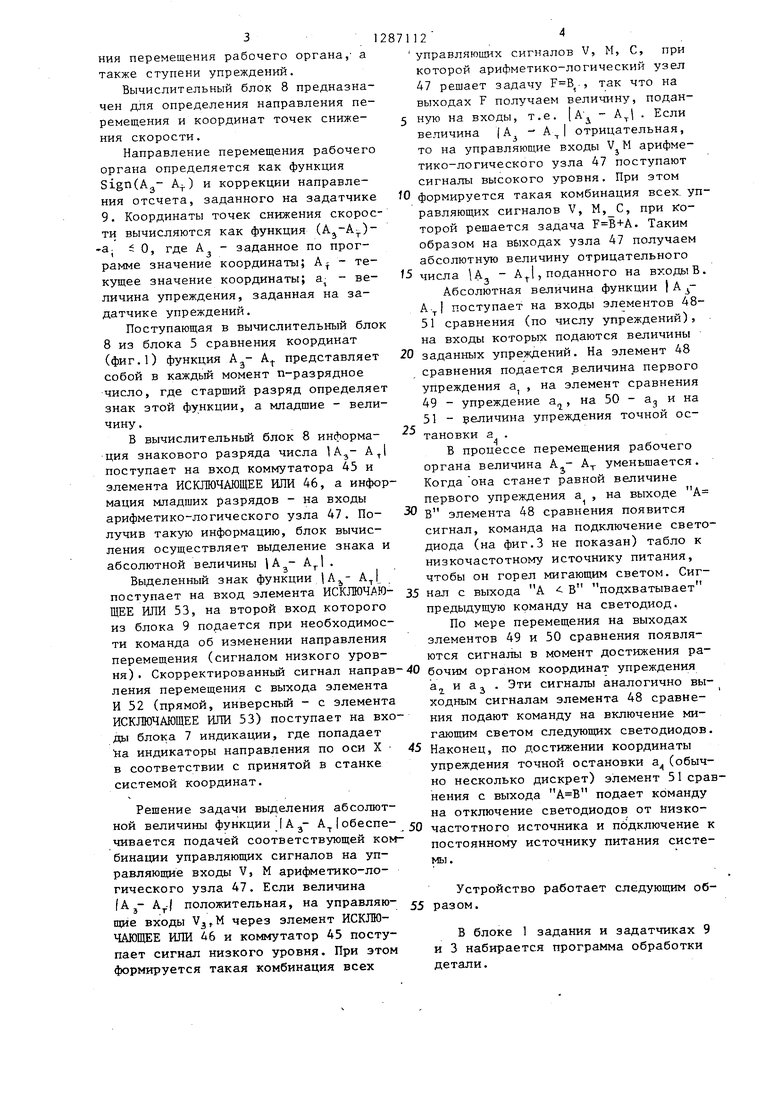
Преобразователь 4 (фиг.З) предназначен для усиления и преобразования синусоидальных импульсов, поступающих от датчика обратной связи 2 в прямоугольные импульсы нужной частоты.
Преобразователь реализует следующие функции:
У,(А -А) (А,- А Р + (А,- А) + (А, А;) (О
и2(Аз А;) + (А. А ) + (А А +
+ (А; АЗ), (2)
где А , А ; - серии импульсов на выходе блока 24 элементов И; и , Uj - серии импульсов на выходе усилителей 25 и 26, 4-кратные по отношению к серии А , А и 20- кратшаШ по отношению к входным сериям A;,,Aj,; Ag, А - серии импульсов, инверсные по отношению к сериям А , А ; . AJ, А - серии коротких импульп сов, сформированные из серий АЗ,
А , А - серии коротких импульсов, сформированные из серий Аj, А.
Блок. 5 сравнения координат предназначен для сравнения координаты действительного положения рабочего органа (текущей координаты с заданной по программе). Блок 5 сравнения в каждый данный момент определяет раз- ность А- А , где А.- заданная координата, AY текущая координата.
Табло 6 предназначено для индикации текущей координаты. Оно построено на 7 сегментных светоизлучающих диодах зеленого цвета. Поступающая на вход табло 6 информация А,- А преобразуется здесь в семисегментный код и воздействует на индикаторы. Величина, индицируемая на табло 6, представляет собой расстояние до цели, уменьщающееся до О по мере приближения к точке позиционирования. Блок 7 индикации выполнен в виде табло с мнемонической схемой, отображающей стрелками, в которых размещены светодиоды, все возможные направле 1
НИИ перемещения рабочего органа,- а также ступени упреждений.
Вычислительный блок 8 предназначен для определения направления перемещения и координат точек сниже- НИН скорости.
Направление перемещения рабочего органа определяется как функция SignCAg- А) и коррекции направления отсчета, заданного на задатчике 9. Координаты точек снижения скорости вычисляются как функция (А -А:.)- -а i О, где А - заданное по программе значение координаты; А - текущее значение координаты; а - ве- личина упреждения, заданная на задатчике упреждений.
Поступающая в вычислительный блок 8 из блока 5 сравнения координат (фиг.1) функция А - А представляет собой в каждый момент п-разрядное число, где старший разряд определяет знак этой функции, а младшие - величину,
В вычислительньй блок 8 информа- ция знакового разряда числа поступает на вход коммутатора 45 и элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 46, а информация младших разрядов - на входы арифметико-логического узла 47 . По- лучив такую информацию, блок вычисления осуществляет выделение знака и абсолютной величины 1А - ,
Вьщеленный знак функции (А,- поступает на вход элемента ИСКЛЮЧАЮ- ЩЕЕ ИЛИ 53, на второй вход которого из блока 9 под,ается при необходимости команда об изменении направления перемещения (сигналом низкого уровня) , Скорректированный сигнал направ ления перемещения с выхода элемента И 52 (прямой, инверсный - с элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 53) поступает на входы блока 7 индикации, где попадает :на индикаторы направления по оси X в соответствии с принятой в станке системой координат.
Решение задачи выделения абсолютной величины функции А 3- А |обеспе- чивается подачей соответствующей комбинации управляющих сигналов на управляющие входы V, М арифметико-логического узла 47. Если величина (AJ- положительная, на управляю- щие входы VjfM через элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 46 и коммутатор 45 поступает сигнал низкого уровня. При этом формируется такая комбинация всех
12
управляющих сигналов V, М, С, при которой арифметико-логический узел 47 решает задачу ., так что на выходах F получаем величину, поданную на входы, т.е. А
Если
величина
А - А.
отрицательная,
то на управляющие входы V М арифметико-логического узла 47 поступают сигналы высокого уровня. При этом формируется такая комбинация всех, управляющих сигналов V, М,С, при Которой решается задача . Таким образом на выходах узла 47 получаем абсолютную величину отрицательного числа А, , поданного на входы В
Абсолютная величина функции I поступает на входы элементов 48- 51 сравнения (по числу упреждений), на входы которых подаются величины заданных упреждений. На элемент 48 сравнения подается величина первого упреждения а , на элемент сравнения 49 - упреждение а, на 50 - а и на 51 - величина упреждения точной остановки а .
В процессе перемещения рабочего органа величина А - уменьшается. Когда она станет равной величине первого упреждения а , на выходе А В элемента 48 сравнения появится сигнал, команда на подключение свето диода (на фиг,3 не показан) табло к низкочастотному источнику питания, чтобы он горел мигающим светом. Сигнал с выхода А - В подхватывает предыдущую команду на светодиод.
По мере перемещения на выходах элементов 49 и 50 сравнения появляются сигналы в момент достижения рабочим органом координат упреждения а„ и а, . Эти сигналы аналогично выЛ о
ходньм сигналам элемента 48 сравнения подают команду на включение мигающим светом следуюш гх светодиодов Наконец, по достижении координаты упреждения точной остановки а(обычно несколько дискрет) элемент 51 сранения с выхода подает команду на отключение светодиодов от низкочастотного источника и подключение к постоянному источнику питания системы.
Устройство работает следующим образом.
В блоке 1 задания и задатчиках 9 и 3 набирается программа обработки детали.
. 5128
По команде Пуск с пульта станка в систему вводится первый кадр про- граммь.. При этом на цифровом табло 6 индицируется расстояние до цели, а на блоке 7 индикации загорается стрелка, конкретно указывающая оператору необходимое направление перемещения рабочего органа.
В процессе перемещения рабочего органа 10 станка в направлении стрелки блока 7 индикации датчик 2 обратной связи, связанный с рабочим; органом 3, выдает информацию о действительном положении рабочего органа.
Информация измерительного датчика в виде двух серий, сдвинутых на 90 , квазисинусоидальных импульсов А и А поступает на вход преобразователя 4. Эти импульсы после предварительного усиления на усилителях 1 и 12 (фиг.2) и инвертирования серии А поступают на входы резисторных фазо- делителей 14 и 15. Здесь происходит деление входных импульсов по фазе, так что на выходе фазоделителей полу- чаем пять серий импульсов, сдвинутых на 36 , Эти серии формируются с помощью элементов 16 и 17, на выходе которых получаем прямоугольнь е импульсы серий АЗ .и А пятикратной час- тоть по отношению к входным.
Далее они инвертируются и по переднему и заднему фронтам обеих серий формирзтотся короткие импульсы. После преобразований на выходе эле- ментов И 24 получаем импульсы четырехкратной частоты по отношению к сериям A.J и А . Они усиливаются в усилителях 25 и 26 и на выходе преобразователя получаем две серии пря- моугольных импульсов и и и двадцатикратной частоты по отношению к входным. Таким образом, при шаге-шкалы измерительного датчика 20 мкм получаем дискретность измерительной си- стемы 1 мкм.
После преобразования в преобразова теле 4 (фиг.1) информация с рабочего органа поступает на вход блока 5 срав нения координат. На другой вход блока 5 сравнения от блока i задания программы поступает программируемая величина координаты точки позиционирования . Блок 5 сравнения непрерывно оп- ределяет разность между заданной и текущей координатами А и А . Эта информация поступает на вход табло 6. Цифровое табло 6 индицирует расстояние
12 ,6
До цели, уменьшающееся до О по мере
приближения к точке позиционирования
Одновременно информация с блока 5 сравнения поступает на вход вычислительного блока 8, который на протяжении всего кадра подтверждает направление перемещения и вычисляет координаты точек снижения скорости соответственно заданным на задатчике упреждений 3 величинам упреждения а-, а., а, и точной остановки а , Информация с вычислительного блока 8 поступает на блок 7 индикации.
В процессе перемещения, когда рабочий орган достигает координаты первой ступени, упреждения, раздается короткий звуковой сигнал и начинает мигать первый светодиод табло (не показано) блока 7 индикации. По этому сигналу оператор снижает скорость перемещения.
Далее по мере приближения к цели рабочий орган достигает координаты второй ступени упреждения. Раздается второй звуковой сигнал и начинает мигать второй светодиод (первый светодиод продолжает мигать). Оператор вновь снижает скорость. Аналогично в точке третьей ступени упреждения раздается короткий звуковой сигнал и мигают все три светодиода. Оператор подводит исполнительный орпан к точке позиционирования на ползучей скорости. Когда раздается четвертый сигнал, все три светодиода горят постоянно, не мигая. По этой команде оператор прекращает перемещение исполнительного органа.
В точке позиционирования с выхода блока 5 сравнения на вход блока i задания с регулируемой выдержкой времени поступает обратньй сигнал на смену кадра программы. Команду на смену кадра может подавать также и оператор с пульта управления. Отработка последующих кадров программы происходит аналогично описанному.
Предлагаемое устройство позволяет повысить производительность за счет автоматического определения параметров управления и выдачи их в виде указаний оператору на индикаторном табло, что позволяет вести обработку на повышенных режимах. При этом по- вьшается точность обработки, упрощается труд оператора, создается возм можность для работы операторов более низкой квалификации.
7
Формула изобретения Устройство индикации и управления для станков, содержащее датчик обрат ной связи, соединенный входом с исполнительным органом станка, а выходом - с входом преобразователя, подключенного выходом к первому входу блока сравнения координат, связанного первым выходом с входом блока задания программы, вторым входом - с выходом блока задания программы, а вторым выходом - с входом цифрового табло, отличающееся тем.
0
8
что, с целью повышения производительности оператора за счет автоматизации определения направления перемещения и упреждения останова рабочего органа станка, в устройство введены два за- датчика, вычислительный блок и блок индикации, подключенный входом к выходу вычислительного блока, связанного первым входом с вторым выходом ч блока сравнения, вторым входом - с выходом первого задатчика, а третьим входом - с выходом .второго задатчика .
Л. 5 У
Фиг. 2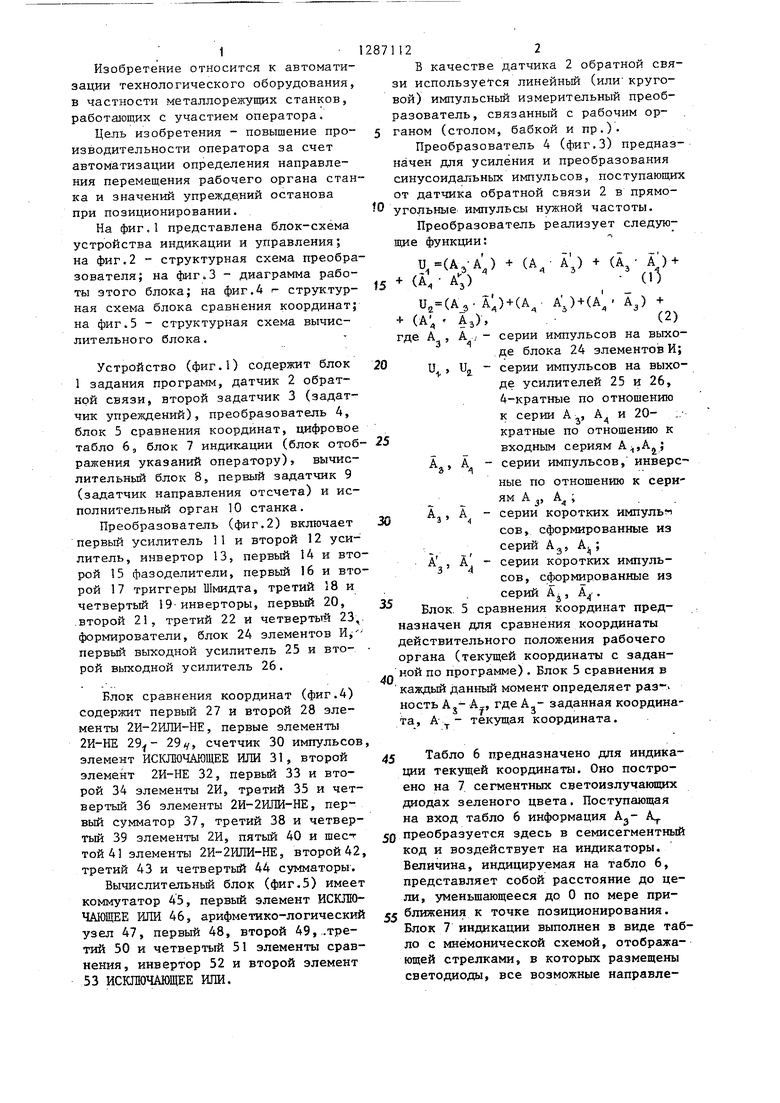
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство индикации и управления для станков | 1985 |
|
SU1290262A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| Устройство для циклового программного управления | 1983 |
|
SU1233104A1 |
| Система позиционного управления положением рабочего органа | 1990 |
|
SU1714573A1 |
| Устройство автоматической коррекции размерной настройки токарных многоинструментальных станков с системой ЧПУ | 1985 |
|
SU1301647A1 |
| Намоточное устройство | 1981 |
|
SU994386A1 |
| Устройство для индикации работы транспортно-закладочной установки | 1980 |
|
SU909164A1 |
| Устройство для позиционного программного управления | 1982 |
|
SU1068895A1 |
| Устройство для программного управленияСТАНКОМ | 1977 |
|
SU805259A1 |
| Система для программного управления | 1985 |
|
SU1251033A1 |
Изобретение относится к области автоматизации технологического оборудования, в частности, металлорежущих станков, работающих с участием оператора. Целью изобретения является повышение производительности оператора за счет автоматизации определения направления перемещения рабочего органа станка. Устройство содержит блок 1 задания программы,датчик обратной связи 2, задатчик 3 (за- датчик упреждений), преобразователь 4, блок 5 сравнения координат,цифровое табло 6, блок 7 индикации (блок отображения указаний оператору), вычислительный блок 8, задатчик 9 (задатчик направления отсчета), исполнительный орган станка 10. Устройство позволяет повысить производительность за счет автоматического определения параметров управления и выдачи их в виде указаний оператору на индикаторном табло, что позволяет вести обработку на повьшенных режимах. При этом повьппается точность обработки, упрощается труд оператора, создается возможность для работы операторов более низкой квалификации. 5 нл. § (Л с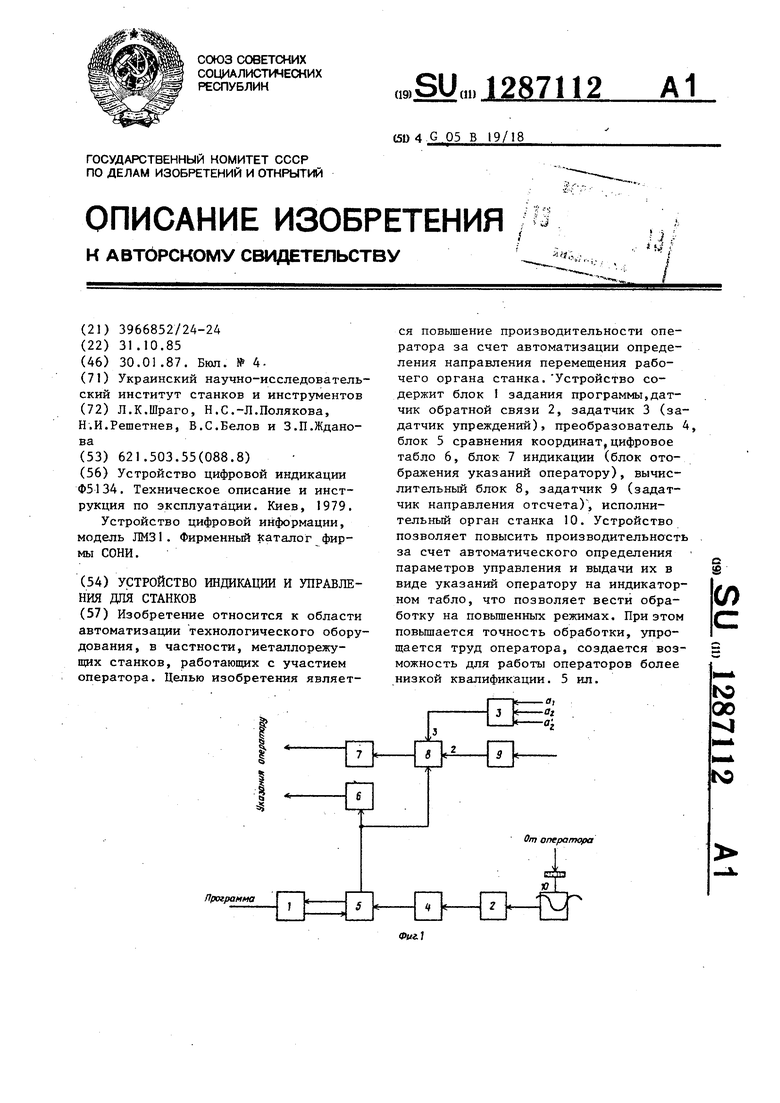
и.
и.
тплллшшшшшшшшшшя лпшшшишшшлшшпшшм
Фиг.З
.Ц Sign А f Uj27
I -u
/
M3 Sf(.l к JA. /
SignAr
SiqnAr
Ж
SigfTAP
E
г
Г
-1
/
:
л
12
/Jj
И/
S,
1
37
KS/.6i2)
О
Лз-/1г БёдйДЗ
ЛТ
Кб1(,9
АгЗ Ц
SignA
Зги
Шина A г
Шина Ад
PefKUM ем
Редким SW
Шина 1/г)ра8л.
5-.
Фиг.
Из Ул. 5
Аз-AT
5 6
SiifnAr
Uy
ВА.Ю
FC
F, FZ
7
ЛАз-Ат)
A A 78
3
3 A At&
В A
A3-Af)a,
g, f/ij-/ ;
1Аз-Афаг
Cf
cLi
т--
tetz
Jgr
Л Л78
.§
Sign AT &1ЦпАз
/f3 fif .5
Редактор К.Волощук Заказ
Техред Л.Сердюкова
Корректор: Л.
Тираж 862Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035,, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород,ул.Проектная,4
Фиъ.5
Корректор: Л. Пилипенко
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Техническое описание и инструкция по эксплуатаи;ии | |||
| Киев, 1979 | |||
| Устройство цифровой информации, модель ЛМЗ1 | |||
| Фирменный каталог фирмы СОНИ. | |||
