1
Изобретение относится к области машиностроения и может найти применение в любых машинах и механизмах, где необходима экстренная остановка врашающегося вала прн превышении установленной скорости
вращения, например при аварийных ситуациях, независимо от направления крутящего и тормозного момента машины.
Известен храповой останов, содержаший храповое колесо и одну или несколько собачек, позволяющих врашафь вал только в одну сторону. При вращении в обратном направлении собачки входят в зацепление с зубьями храпового колеса и стопорят вал }.
Недостатком останова является нереверсивность и отсутствие возможности останова вращающегося вала при недопустимом возрастании частоты его вращения.
Известен также храповый останов, содержащий установленные на вращающемся валу храповое колесо, сцепляемое с зубьями последнего четыре собачки, укрепленные на раме, а также систему управления, включающую приводы для подъема собачек, выполненные в виде электромагнитов, и концевые выключатели 2|.
Каждый электромагнит посредством рычагов и пружин может воздействовать сразу на все собачки, приводя их в определенное состояние.
По желанию оператора, который вклюS чит в работу первый или второй электромагнит, собачки будут поворачивать храповое колесо только по часовой стрелке или протнб часовой стрелки.
Недостатками известного реверсивного
10 храпового механизма являются отсутствие возможности использовать механизм в качестве останова в аварийных ситуациях, так как он может работать только в прерывистом режиме (а вал главного привода
имеет равномерную скорость вращения); в крайнем правом положении одного из рычагов храповое колесо будет удерживаться от поворота одной из собачек только в одном направлении - против часовой стрелкн. Остальные собачки будут блокированы, и храповое колесо будет неограниченно вращаться в обратном направлении.
Целью изобретения является обеспечение останова вала независимо от направления
его вращения при превышении максимально допустимой частоты вращения.
Поставленная цель достигается тем, что храповой останов снабжен программным диском с выступами, жестко соединенном с храповым колесом, последнее выполнено сдвоенным с зубьями разного направления, система управления снабжена реле времени, включенными между концевыми выключателями и приводами и взаимодействующими с выступами программного диска, при этом число упомянуты.х выступов равно числу зубьев одного направления и они расположены симметрично относительно зубьев разного направления.
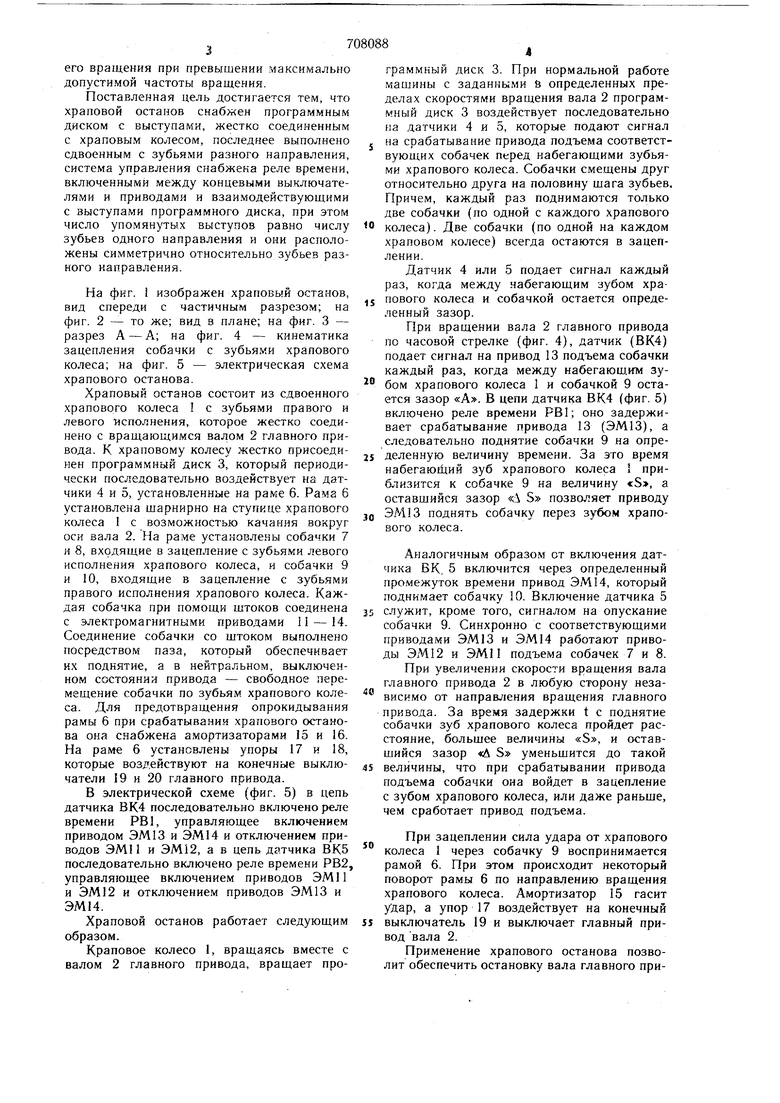
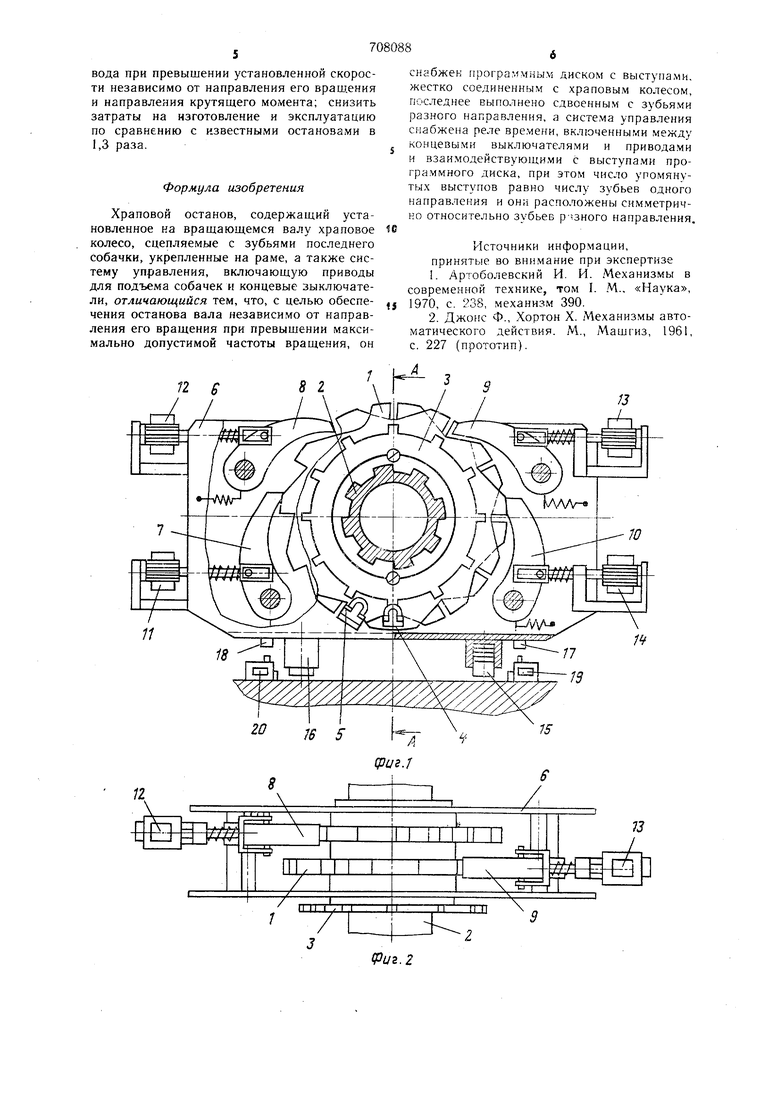
На фиг. 1 изображен храповый останов, вид спереди с частичным разрезом; на фиг. 2 - то же; вид в плане; на фиг. 3 - разрез А - А; на фиг. 4 - кинематика зацепления собачки с зубьями храпового колеса; на фиг. 5 - электрическая схема храпового останова.
Храповый останов состоит из сдвоенного храпового колеса с зубьями правого и левого исполнения, которое жестко соединено с вращающимся валом 2 главного привода. К храповому колесу жестко присоединен программный диск 3, который периодически последовательно воздействует на датчики 4 и 5, установленные на раме 6. Рама 6 установлена щарнирно на ступице храпового колеса 1 с возможностью качания вокруг оси вала 2. На раме установлены собачки 7 и 8, входящие в зацепление с зубьями левого исполнения храпового колеса, и собачки 9 и 10, входящие в зацепление с зубьями правого исполнения храпового колеса. Каждая собачка при помощи щтоков соединена с электромагнитными приводами П - 14. Соединение собачки со щтоком выполнено посредством паза, который обеспечивает их поднятие, а в нейтральном, выключенном состоянии привода - свободное перемещение собачки по зубьям храпового колеса. Для предотвращения опрокидывания рамы 6 при срабатывании храпового останова она снабжена амортизаторами 15 и 16. На раме 6 установлены упоры 17 и 18, которые воздействуют на конечные выключатели 19 и 20 главного привода.
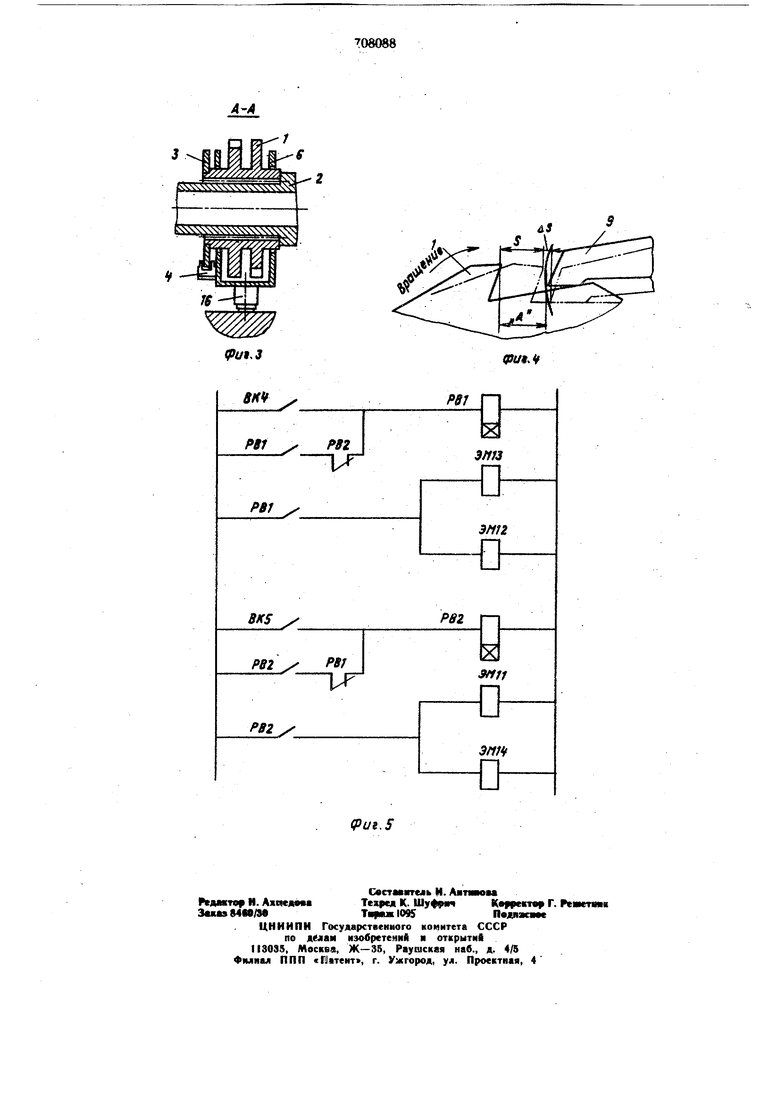
В электрической схеме (фиг. 5) в цепь датчика ВК4 последовательно включено реле времени РВ1, управляющее включением приводом ЭМ13 и ЭММ и отключением приводов ЭМ11 и ЭМ12, а в цепь датчика ВК5 последовательно включено реле времени РВ2, управляющее включением приводов ЭМ11 и ЭМ12 и отключением приводов ЭМ13 и ЭМИ.
Храповой останов работает следующим образом.
Краповое колесо 1, вращаясь вместе с валом 2 главного привода, вращает программный диск 3. При нормальной работе мащины с заданными S определенных пределах скоростями вращения вала 2 программный диск 3 воздействует последовательно на датчики 4 и 5, которые подают сигнал J на срабатывание привода подъема соответствующих собачек перед набегающими зубьями храпового колеса. Собачки смещены друг относительно друга на половину щага зубьев. Причем, каждый раз поднимаются только две собачки (по одной с каждого храпового
о колеса). Две собачки (по одной на каждом храповом колесе) всегда остаются в зацеплении.
Датчик 4 или 5 подает сигнал каждый раз, когда между набегающим зубом храпового колеса и собачкой остается определенный зазор.
При вращении вала 2 главного привода по часовой стрелке (фиг. 4), датчик (ВК4) подает сигнал на привод 13 подъема собачки каждый раз, когда между набегающ.км зу бом храпового колеса 1 и собачкой 9 остается зазор «А. В цепи датчика ВК4 (фиг. 5) включено реле времени РВ1; оно задерживает срабатывание привода 13 (ЭМ13), а следовательно поднятие собачки 9 на опреJ деленную величину времени. За это время набегаю111ий зуб храпового колеса приб тизится к собачке 9 на величину «S, а оставщийся зазор «Л S позволяет приводу
0 ЭМ13 поднять собачку перез зубом храпового колеса.
Аналогичным образом от включения датчика ВК, 5 включится через определенный промежуток времени привод ЭМ14, который поднимает собачку 10. Включение датчика 5
5 служит, кроме того, сигналом на опускание собачки 9. Синхронно с соответствующими приводами ЭМ13 и ЭМИ работают приводы ЭМ12 и ЭМ11 подъема собачек 7 и 8. При увеличении скорости вращения вала главного привода 2 в любую сторону независимо от направления вращения главного привода. За время задержки t с поднятие собачки зуб храпового колеса пройдет расстояние, больщее величины «S, и оставшийся зазор «А S уменьшится до такой
S величины, что при срабатывании привода подъема собачки она войдет в зацепление с зубом храпового колеса, или даже раньще, чем сработает привод подъема.
При зацеплении сила удара от храпового колеса 1 через собачку 9 воспринимается рамой 6. При этом происходит некоторый поворот рамы 6 по направлению вращения храпового колеса. Амортизатор 15 гасит удар, а упор 17 воздействует на конечный выключатель 19 и выключает главный привод вала 2.
Применение храпового останова позволит обеспечить остановку вала главного привода при превышении установленной скорости независимо от направления его вращения и направления крутящего момента; снизить затраты на изготовление и эксплуатацию по сравнению с известными остановами в 1,3 раза.
Формула изобретения
Храповой останов, содержащий установленное на вращающемся валу храповое колесо, сцепляемые с зубьями последнего собачки, укрепленные на раме, а также систему управления, включающую приводы для подъема собачек и концевые выключатели, отличающийся тем, что, с целью обеспечения останова вала независимо от направления его вращения при превыщении максимально допустимой частоты вращения, он 72
снабжен программны 5 диском с выступами, жестко соединенным с храповым колесом, последнее выполнено сдвоенным с зубьями разного направления, а система управления снабжена реле времени, включенными между концевыми выключателями и приводами и взаимодействующими с выступами программного диска, при этом число упомянутых выступов равно числу зубьев одного направления и они расположены симметрично относительно зубьев р- зного направления.
Источники информации, принятые во внимание при экспертизе . Артоболевский И. И. Механизмы в современной технике, том I. М., «Наука, 1970, с. 238, механизм 390.
2. Джонс Ф., Хортон X. Механизмы автоматического действия. М., Машгиз, 1961, с. 227 (прототип). е
| название | год | авторы | номер документа |
|---|---|---|---|
| Останов для ленточного конвейера | 1985 |
|
SU1265115A1 |
| Привод летучих ножниц | 1985 |
|
SU1269925A1 |
| ВЕРТИКАЛЬНЫЙ КОВШОВЫЙ ЭЛЕВАТОР | 1992 |
|
RU2044683C1 |
| РУЧНАЯ ХРАПОВАЯ ЛЕБЕДКА | 1990 |
|
RU2028272C1 |
| Двухсторонний стопорный механизм | 1981 |
|
SU1044858A1 |
| Храповой аварийный останов | 1982 |
|
SU1062164A1 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2012 |
|
RU2508978C2 |
| Устройство для приведения кругловязальной машины в положение,соответствующее началу вязания изделия | 1985 |
|
SU1339173A1 |
| Механизм поворота распределительного барабана круглочулочного автомата | 1977 |
|
SU659666A1 |
| Подпрессовщик брикетного пресса | 1987 |
|
SU1500507A1 |
(puz.Z
(PU.lf
PSJ
Pil
лУ
SKS
PBJ
РВ2
Р82
ЗШЗ
Р82
9fl1i
