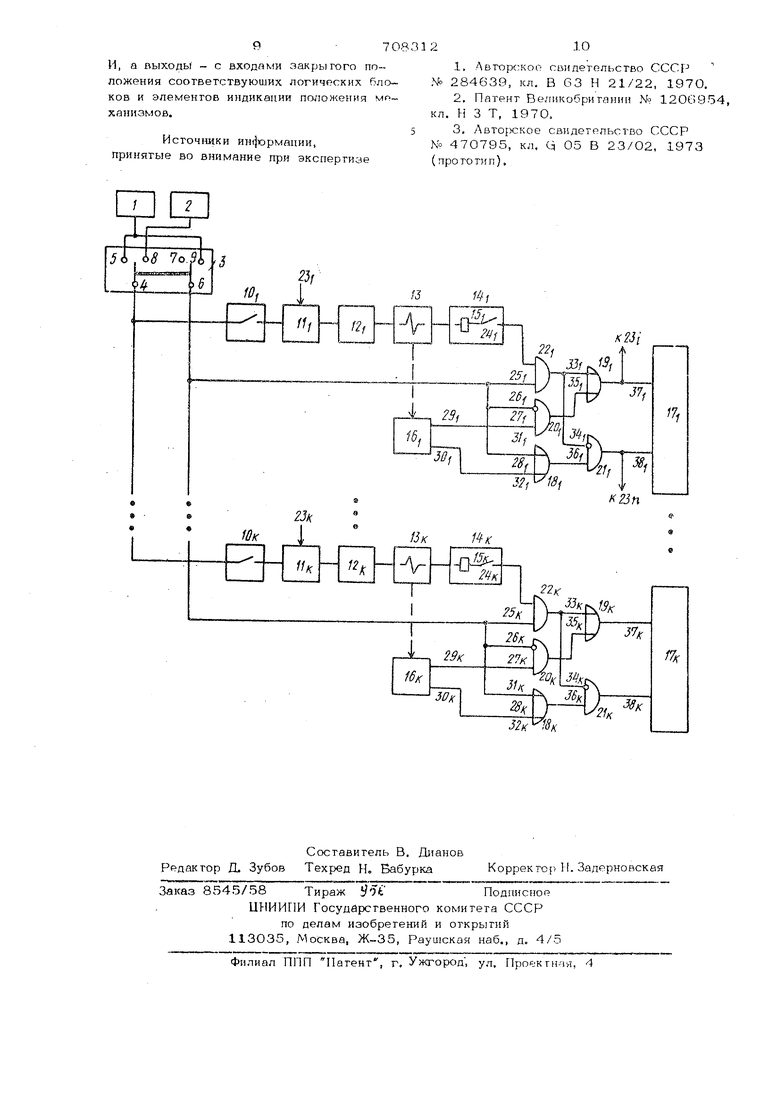
жеиия механизмов, реле контроля, обмотки котхэрых через первый подвижный контакт переключателя режимов связаны с контрольным блоком питания, а контакгы - с первыми входами элементов И, вторые входы которых объединены с запрещающими входами первых элементов ЗАПРЕгТ и подключены ко второму подвижному контакту переключателя режимов и первые элементы ИЛИ, первые входы которых соединены с выходами элементо И, вторые входы - с выходами первых элементов ЗАПРЕТ, а выходы с входам открытого положения соответствующих ло гических блоков и элементов индикации положетгая механизмов L3 . В этом устройстве обмотки реле конт роля включены последовательно с рабочи Nffl обмотками магнитных усилителей, управляющие обмотки KOTtjpbix соединены последовательно с исполнительными элементами (обмотками электромагнитов). Таким образом, в качестве чувствительного элемента контроля в известном устройстве использовано реле, управляемое при помощи магнитного усилителя. Могут быть и другие чувствительные эле менты контроля, например, в которых реле контроля при исправных цепях электро магнитов реагируют на ЭДС самоиндукции, возникающую на заящмах электрома нитов при подаче контрольного сигнала. Достоинством известного устройства LSJ является повышенная достоверность контроля, обеспечение контроля всего тракта управления, включая цепи исполнительный устройств и коммутирующих элементов, В то же время ему присущи недостатки, заключающиеся в неадэкватной сигнализации состояния управляемых механизмов в рабочем и контрольном режимах, В устройстве при установке переключателя релшмов Б положение КОНТ РОЛЬ на пупьте управления гаснут все мнемознаки положения механизмов, при подаче команды на открытие мехаш1зма захоггается соответствующий мнемознак, а при отмене команды он опять гаснет, В реальных системах механизмы находят ся в каком-то одном исходном состоянии например, закрытом, что. в рабочем режи ме сигнализируется устройством индикации положения механизмов. Таким образом, известное устройство в режиме фун ционального контроля не индицирует исходное состояние Mexaiffl3MOB, В реальных системах при работе по прямому назначению самовозвратные механизмы (клапаны, замки, нейтральные реле н т.п.) после отключения обмотки исполнительного элемента - электромагнита автоматически возвращаются в исходное закрытое положение. В известном устройстве (з) в функционального контроля мнемознак после отмены команды открытия гаснет и не обеспечивается имитация автоматического возврата Mexaini3Ma в исходное закрытое положение, что также ограничивает функциональные возможности контроля по отпощению к рабочему ре яшму. Цель изобретения - расширение фу}1к циональных возможностей устройства путем обеспечения одинаковой индикации в рабочем и контрольном режимах, в том числе обеспечения индикации закрытого положения всех механизмов при переводе переключателя режимов в положение КОНТРОЛЬ и автоматической имитации закрытия механизмов при отключении обмоток электромагнитов (снятии команды открытия) в режиме контроля. Поставленная цель достигается тем, что в устройство функционального контроля системы автоматизированного управления введены вторые элементы ИЛИ и ЗАПРЕГГ, вгзгходы закрытого положения датчиков положения подключены к первым входам вторых элементов ИЛИ, вторые входы которых подключены к запрещающим входам первых элементов ЗАПРЕТ, а выходы - к информационным входам вторых элементов ЗАПРЕГГ, запрещающие входы которых соединенгз с выходами элементов И, а выходы - с входами закрытого положения соответствующих логических блоков и элементов индикации положения механизмов. Сущность изобретения поясняется чертежом, где изобраЛгена функциональная схема устройства Устройство функционального контроля системы автоматизированного управления предНсЭдначено для контроля трактов управления К самовозвратными механизмами, например, двухпозиционными клапанами судовых технических средств. Устрой- ство содержит рабочий блок питания 1, контрольный блок питания 2, переключачатель релшмов 3 с пополнениями Г АБОТА (замкнуты кона-ак-ты 4 и 5, 6 и 7) и КОПТРОЛЬ (замкнуты контакты 4 и 8, 6 и 9), командоаппараты 1О, логические блоки И, выходные элементы 12, исполнительные элементы - электромагниты 13, элементы контроля 14 с реде контроля 57 15, датчики положения 16, элементы пндикацин положения меха1газмов 17, элементы ИЛИ 18Д9, элементы ЗАПРЕТ 20,21, элементы И 22. Блоки 11 имеют входы авто магического управления 23 по открытому или закрытому положению каких-либо механизмов, по значению каких-либо параметров системы управления (температуры, давления и г.п, )..Реле контроля 15 имеют контакты 24, подкпю ченные к вхопам 25 соответствующих элементов И, входы 26 которых объединены с запрещающими входами 27 элементов ЗАПРЕТ 20 и входами 28 элементов ИЛИ 18 и подключены к контактам 6 переключателя ремдамов 3. Датчики положения 16 имеют выходы открытого положения 29 и закрытого положения 30, подключенные соответственно к информационным входам 31 элементов ЗАПPET 20 и входам 32 элементов ИЛИ 18 Выходы элементов И 22 подключены соответственно к входам 33 элементов ИЛИ 3.9 и запрещающим входам 34 элементов ЗАПРЕТ 21, Выходы элементов ЗАПРЕТ 20 подключены к входам 35 элементов ИЛИ 19, а выходы элементов ИЛИ 18 к информационным входам 36 элементов ЗАПРЕТ 21. Элементы индикации положения механизмов 17 имеют входы открытого 37 и входы закрытого 38 положения механизмов, которые соответственно подключены к выходам элементов ИЛИ 19 и ЗАПРЕТ 21,а также к входам 23 тех блоков 11 которые имеют автоматическое управление по положению соответствующего меха низма. На чертеже в частности показано, что входы 37 и 38 , относящиеся к первому механизму , связаны с входами автоматического управления 23 логических блоков 11, относящихся по открытокту по ложению первого механизма - к 4 -ому fexaниз fy, а по закрытому положению первого механизма - к и -му механиз-му. При отсутствии в системе управления блокировок по положению, например, К-того механизма, соответствующие свя зи входов 23 блоков 11 с входами 37 и 38 элементов индикации положе1шя 17 могут отсутствовать. Принцип действия устройства заключается в. следующем. В положении РАБОТА переключателя 3, соответствующем подготовке к работе системы управления по прямому назначению, все механизмы находятся в исходно 26 зш.рытом по,г ожении. При этом сигналы с выходов закрытого положения 30 датчиков положения 16 посТ5гпают на входы 32 алек-енюв ИЛИ 18, на входы 36 элементов ЗАПРЕТ 2.1, с выходов которь х Б связи с отсутствием -сигналов на запрещающих входах 34, поступают сигналы на входы закрь того положения 38 элементов индикации положения механизмов 17, В результате на мнемосхеме индицируется исходное закрытое положение всех мехашЗМоВо При замыкании контактов командоаппаата 10 рабочее напряжение от блока питания 1 через логический блок 11 и выходной элемент 12 поступает в цепь электромагЕ1ита 13, срабатывание которого приводит к переводу механизма в открытое положение. При этом сикмается сигнал с вьгхода 30 соответствую иег о датчика положения 16, входа 32 элемента ИЛИ 18, входа 36 элемента ЗАПРВТ 21 и входа закрь того положения 38 элеые 1та 17 и появляется сигнал на вькоде открытого положения 29 датчика положения 16, входе 31 элемента ЗАПРЕТ 20, входе 35 элемента ИЛИ 19 и входе открьггого положения 37 эле мента индикации положенгтя механизма 17« При возврате комаьдоаппарата 1О в исходиое нейтральное положение команда на открытие механизма отменяется, обмотка электромагнита 13 отключается и механизгч автоматически возЕьращается в исходное закрытое положение, при этом отключается сигнал с входа 37 и подается сигнал на вход 38 устройства индикации пололчения 17. В рабочем релеиме обмотки реле контроля 15 не подключаются и контроля 14 не реагируют на рабочий сигнал, В положении КОНТРОЛЬ переключателя режимов 3, соответствующем подготовке к режиму (|а-нкциональ)гого контроля системы, на входы кок(аг доаппаратов 10 подается через контшсгы 4 и 8 переключателя 3 контрольное напряжение, пониженное по отношению к напряжегапо блока 1 до величины, включающей возможность срабатывания при контроле электромагнитов 13, но достаточное для работы элемептов контроля 14 и срабатывания репе контроля 15 при подаче контрольного сигнала и отсутствии неисправностей в контролируемом тракте управления, Одновремеитю контакты 6 и , 9 переключателя 3 поступают сигналы на входы 26 элементов И 22, запрещающие входы 27 эпеменгов ЗАПРЕТ 20 и входы 28 элементов ИЛИ 18. В результате при нодгоговке к pexiHNfv фушсцнонального контроля запрещается подача сигналов на входы 35 элементов ИЛИ 19 и через элементы ИЛИ 18 и ЗАПРЕТ 21 поступают сигналы па входы закрытого положегшя 38 всех элементов индикации 17, чго вызывает на пульте управления индикацию закрытого положения всех механизмов. При функциональном контроле тракта управления какими-либо механизмами замыкаются контакты соответствующих командоаппаратов Ю, При наличии необходимых сигналов авто магического управления на входах 23 логических блоков 11 контрольный сигнал от контрольного блок питания 2 через выходные элементы 12 поступает в цеш5 электромагнитов 13, Пр отсутствии неисправностей в тракте управлаьшя в элементе контроля 14 срабатывает реле 15 и замыкает свой контак:т 24„ При этом подаются сигналы на оба входа 25 и 26 элементов И 22, с выхо да которого посылается запрещающий сигнал на вход 34 элемента ЗАПРЕТ 21 и сигнал на вход 33 элемента ИЛИ 19. В результате подается сигнал на вход 37 элемента 17 и на вход 23 блокировки по оперы тому, положению данного механизма блока 11 соответх;твующего механизму, с которым функционально связан в системе данный механизм. При этом также снимается сигнал закрытого положения с входов 38 соответствующего элемента 17 а на мнемосхеме зажигается мнемознак открытия механизма. При возврате коман доаппарата 1О в исходное нейтральное по ложение команда на открытие мех.анизма отменяется, обмотка электромагнита 13 от;ключается от контрольнох о блока питания, а реле контроля 15 размыкает контакт 24. При этом снимается сигнал с входа 25 элемента И 22, входа 33 элемента ИЛИ 19 и запрещающего входа 34 элемента ЗАПРЕТ 21. В результате отключается сигнал на входе 37, появляется сигнал на входе 38 элемента 17, что приводит к отключению на пульте мнемознака открытого положения и зажиганию мнемознака закрытогр положения. Тем самым в режяме функционального контроля системы автоматизированного управления имитируется автоматический самовозврат механизма, из открытого положения в исходное закрыое положение при отмене команды открыия. При этом сигнализация в системе обепечивается одинаковой как в рабочем, ак и Б контрольном режимах, что позвояет без специальных тренажных устойств проводить обучение персонала в ерерывах функционирования системы по рямому назначению, закреплять навыки ерсонала по четкому выполнению рабочих ехнологических операций и тем самым ущественно повысить эффективность и адежность управления. Формула изобретения Устройство для функционального контроля системы автоматизированного управления самовозврагными механизмами, содержащее рабочий и контрольный блоки питания, переключатель режимов, последовательно соединенные командоаппараты, логические блоки, выходные элементы, исполнительные элементы, датчики положения механизмов, выходы открытого положения которых подключены к информационным входам первых элементов ЗАПРЕТ, элементы индикации положения механизмов, реле контроля, обмотки которых через первый подвижный контакт переключателя режимов связаны с контрольным блоком питания, а контакты - с нервыми входами элементов И, вторые входы которых объединены с запрещающими входами первых элементов ЗАПРЕТ и подключены ко второму подвижному контакту переключателя режимов, и первые элементы ИЛИ, первые входы которых соединены с выходами элементов И, вторые входы - с выходами первых элементов ЗАПРЕГГ, а выходы - с входами открытого положения соответствующих логических блоков и элементов индикации положения механизмов, о тличающ е е с я тем, что, с целью расширения функциональных возможностей устройства, в него введены вторые элементы ИЛИ и ЗАПРЕТ, выходы закрытого положения датчиков положения подключены к первым входам вторых элементов ИЛИ, вторые входы которых подключены к запрещающие входам первых элементов ЗА ПРЕТ, а выхоы - к информационным входам вторых элементов ЗАПРЕТ, запрещающие входы оторых соединены с выходами элементп
И, а выходы - с входами закрыгого положения соответствующих логических блоков и элементов индикации положения механизмов.
Источники ин4юрмании, принятые во внимание при экспертизе
1,Авторское силдетельство СССР
№ 284639, кл. В 63 Н 21/22, 197О.
2,Патент Великобритании N 120(, кл. Н 3 Т, 1970.
3,Лвто{х;кое свидетельство СССР NO 470795, кл, q 05 В 23/О2, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля системы автоматизированного управления механизмами с самоудержанием | 1977 |
|
SU690449A1 |
| Устройство функционального контроля системы автоматизированного управления | 1973 |
|
SU470795A1 |
| Система погрузки-выгрузки жидких грузов на судне | 1981 |
|
SU1064583A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ | 1973 |
|
SU363936A1 |
| АВТОМАТИЧЕСКИЙ КОНТРОЛЬНО-ПРОПУСКНОЙ ПУНКТ | 1972 |
|
SU435547A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| Устройство для контроля сопротивления изоляции в электрической сети переменного тока с изолированной нейтралью | 1980 |
|
SU935830A1 |
| Устройство для управления про-цЕССОМ ОСушЕНия СТОчНыХ КОлОдцЕВНА СудНЕ | 1979 |
|
SU796058A2 |
| Устройство для контроля обрыва и короткого замыкания в цепи с электромагнитной нагрузкой | 1977 |
|
SU661426A1 |
| УСТРОЙСТВО БЫСТРОДЕЙСТВУЮЩЕГО АВТОМАТИЧЕСКОГО ВКЛЮЧЕНИЯ РЕЗЕРВА | 2006 |
|
RU2292621C1 |
