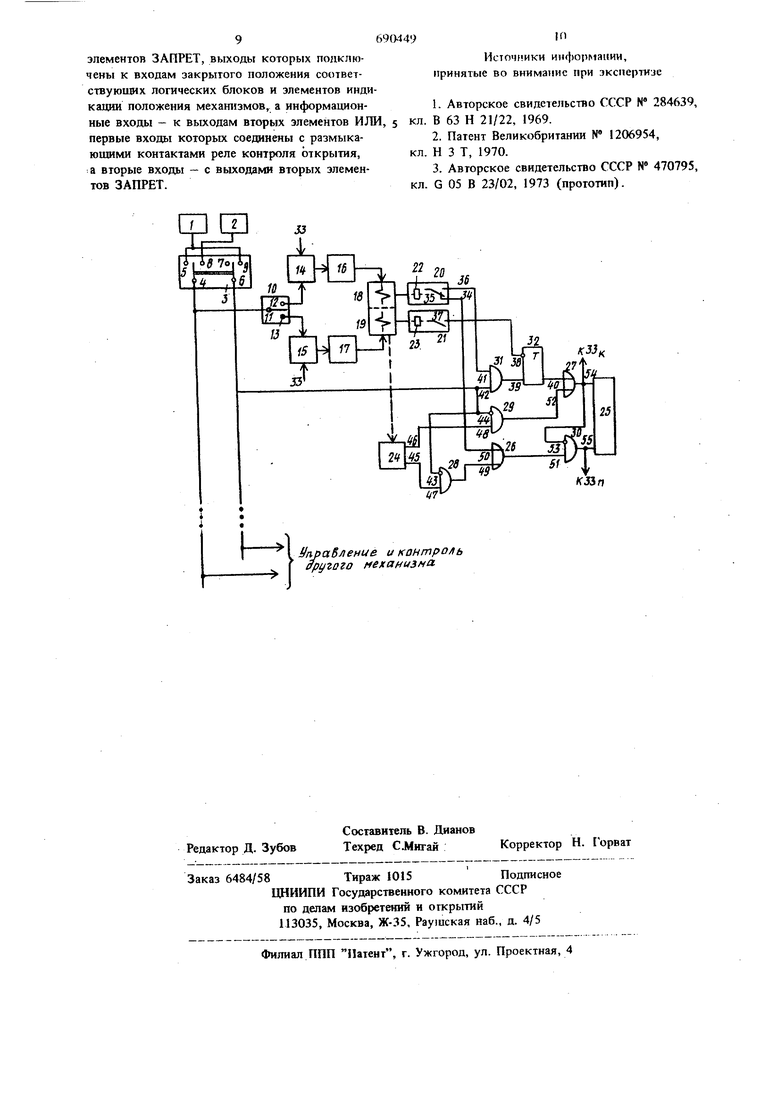
Изобретение относится к области автоматики и может быть использовано в систем.ах уп- равления судовыми техническими средствами. Известно устройство фуикцнональиого контроля исправности системы автоматизированного управления, содержащее блок питания, блок логики со световым табло и реле формирования контрольного теста Ц1. Недостатком известного устройства явЛяется пониженная достоверность функционального контроля и отсутствие контроля выходных цепей системы автоматики из-за того, что тракт прохождения контрольного сигнала в процессе функционального контроля системы изменен по от1юшению к тракту прохождения рабочего airнала во время работы системы по прямому назначению и не проходнт через цетш исполнительных устройств. Известна система контроля, которая охватывает выходные устройства с исключением сра6aTbiBajmH исполнительных устройств при контроле за счет выбора характеристик тестовых сигналов, которые по частоте, уровню и длитель ности не могут вызвать срабатывания исполнительных устройств {2. Известное устройство позволяет осуществить контроль исправности канала тревожной сигнализации. Недостатком известного устройства является то, что оно не обеспечивает контроль всего тракта системы управления от командоаппарата до исполнительных устройств. Наиболее близким по технической сущности к предложенному изобретению является устройство для функционального контроля системы томатизироваиного i управления механизмами с самоудержанием, содержащее рабочий и контрольный блоки питания, переключатель режимов, последовательно соединенные командоаппараты, логические блоки, выходные злементы, исполнительные элементы закрытэ я и открытая, датчики положения механизмов, выходы открытого и закрытого положений готорых подключены к информационным входам соот; ветственно первых и вторых элементов ЗАПРЕТ, злементы индикации положения механизмов, реле контроля открытия и закрьггая, обмотки которых через первый подвижный контакт переключателя режимов связаныС контрольным блоком т1тания, а замыкзюпше контакты реле контроля открытия соедаиены с первыми входами эпементов И, вторые входы которых подключены к запрещающим входам первых и вторых aneMfifiTOB ЗАПРЕТ и второму подвижному контакту переключателя режимов, и первые элементы ИЛИ, первые входы которых соединены с выходами первых элеме1ггов ЗАПРЕТ, а выходы - с выходами открытого положения соответствующих логотеских блоков и элементов индикации положения механизмов {3. Недостатком известного устройства является то, что в режиме функционального контроля не инди1щрует исходное состояние механизмов. Цель изобретения - расширение фу-икт ональных возможностей устройства прн управлении механизмами с самоудержанием за счет обеспечения одинаковой индикации в рабочем и контрольном режимах, в том числе обеспечение индикавди закрытого положешя всех мехаЮ13МОВ при переводе переключателя режимов в положение КОНТРОЛЬ и автоматической имитации памяти состоя {ия механизма при отключении обмоток электромагнитов открытия и закрытия в режиме контроля. Поставленная цель достигается тем, что в устройство введены элементы ПАМЯТЬ, вторые элементы ИЛИ и третьи элементы ЗАПРЕТ, замыкающие контакты реле контроля закрытия подключены к нулевым входам элементов ПАМЯТЬ, к единичным входам которых подключены выходы элементов И, а к выходу - вторые входы первых элементов ИЛИ, с выходами Kbtopbix связаны запрещающие входы третьих элемеитоТв. ЗАПРЕТ, выходы которых подключены к входам закрытого положения соответствующих логических локов и элементов индикации положения механизмов, а информанионные входы - к выходам йторьк элейентов ИЛИ, первые входы которых соединены с размыкающими контактами реле контроля открытия, а вторые входы - с выходами вторых элементов ЗАПРЕТ. , Сущность изобретения поясняется чертежом где изображена функциональная схема устройства. Устройство содержит рабочий блок питания 1, контрольный блок гштания 2, переключатель режимов 3 с положениями РАБОТА (зам кнуты контакты 4-5, 6-7) и КОНТРОЛЬ (зам кнуть контакты 4-8 и 6-9) и для каждого м ханизма командоаппараты 10 с нулевым положением и положешями ОТКРЫТЬ ( замкнуть контакты 11-12) и ЗАКРЫТЬ (замкнуты контакты 11-13), логические блоки 14, 15, выход ные элементы 16, 17, исполнительные элементы электроматиты открытия 18 и закрытия 19, элементы контроля открытия 20 закрытия 2 13правляющие работой реле контроля открьггия 22и закрытия 23, датчики положения 24, элементы индикации положения механизмов 25, элементы ИЛИ 26, 27, элементы ЗАПРЕТ 28, 29, 30, элементы И 31 и элементы ПАМЯТЬ 32. Логические блоки 14 и 15 имеют входы авоматического управления 33 по открытому или закрытому положению каких-либо механизмов, по значению каких-либо параметров системы упавления (температуры, давления и т.п.). Реле контроля открытия 22 имеет переключающий контакт 34-35-36, а реле контроля закрытия 23- замыкающий контакт 37, подключенный к нулевому входу 38 элемента ПАМЯТЬ 32, единичный вход 39 которого соединен с выходом элемента И 31,/а выход - с входом 40 элемента ИЛИ 27. Вход 41 элемента И 31 подключен к замыкающему контакту 36 реле контроля открытия 22, а вход 42, объединенный с запрещающими входами 43, 44 элементов ЗАПРЕТ 28,29,. подключен к контактам 6 переключателя режимов 3. Датчики положения, 24 имеют выходы закрытого положения 45 и открытого положения 46, подключенные к информационным входам 47, 48 элементов ЗАПРЕТ 28 и 29 соответственно. Выход элемента ЗАПРЕТ 28 соединен с входом 49 элемента ИЛИ 26, вход 50 которого подключай к размыкающему контакту 34 реле контроля открытия 22, а вьгход - к информаадоиному входу 51 элемента ЗАПРЕТ 30. Выход элемента ЗАПРЕТ 29 соединен с входом 52 элемента ИЛИ 27, выход которого подключен к запрещающему входу 53 элемента ЗАПРЕТ 30, входу автоматического управления 33 к к-того механизма, который получает сигнал управления при открытом положении данногб механизма, и к входу открытого положения 54 элемента индикации положения механизмов 25. Выход элемента ЗАПРЕТ 30 подключен к входу закрытого положения 55 элемента индикации положения механизмов 25 и входу автоматического управления ЗЗп п-го механизма, который получает сигнал управления при закрытом положении данного механизма. Принцип дейстЬия устройства заклю(чается в следующем. В положении РАБОТА переключателя 3, что соответствует подготовке к работе, системы управления по прямому назначению, все механизмы находятся в исходном закрытом положении, а элемент ПАМЯТЬ 32 - в исходном нулевом состоянии. При этом сигналы с выходов закрытого положения 45 датчиков положения 24 поступают на входы 47 элементов ЗАПРЕТ 28, с выходов которых в связи с отсутствием сигналов на запрещающих входах 48, поступают сигналы на входы 49 элементов. ИЛ И 26, которые передают сигналы на входы 51 элементов ЗАПРЕТ 30 и затем входы закрьпого- положения 55 элементов индикации положения механизмов 25. В результате на мнемосхеме пульта управления индицируется исходное закрытое положение всех механизмов. При переводе командоаппарата 10 в положение ОТКРЫТЬ замыкаются контакты 11-12 и рабочее напряжение от блока пи тания 1 через логический блок 14 и выходной элемент 16 поступает в цепь электромагнита открытия 18, срабатывание которого приводит к переводу механизма в открытое положение. При этом снимается сигнал с выхода 45 датчика положения 24, в5сода 47 элемента ЗАПРЕТ 28, вхо да 49 элемента ИЛИ 26, входа 51 элемента ЗАПРЕТ 30 и входа 55 элемента индикации положенин механизмов 25 и появляется сигнал на выходе открытого положения 46 датчика положения 24, информационном входе 48 элемента ЗАПРЕТ 29, входе 52 элемента ИЛИ 27, с выхода которого сигнал поступает на вход открытого положения 54 соответствующего элемента индикации положения механизма 25. В результате на мнемосхеме пульта управления гаснет мнемознак закрытого положения и зажигается мнемознак открытого положения управляемого механизма. При nocjjeдующей установке командоаппарата 10 в нулевое положение отключается электромагнит открытия 18, но механизм остается в открытом положении и информация об этом на пульте управления сохраняется. Для перевода механизма в закрытое положение командоаппарат 10 устанавливается в положение ЗАКРЫТЬ. При этом замыкаются контакты 1113 и рабочее напряжение от блока питания 1 через логический блик 15 и выходной элемент 17 поступает в цепь электромагнита закрытия 19 срабатьшание которого приводит к переводу механизма в исходное закрытое положение. При этом снимается сигнал с входа открытого положения 54 и появляется сигнал на входе закрыто го положения 55 элемента икдикавди положения механизма 25. В результате на мнемосхеме пуль та управления гаснет мнемознак открытого поло жения и зажигаете мнемознак закрытого положения управляемого механизма. При последующей установке командоаппарата 10 в нулевое положение отключается электромагнит закрытия 19, но механизм остается в закрытом положении и информация об этом на пульте управления сохраняется. В рабочем режиме обмотки реле контроля 22 и 23 не подключаются и злементы контроля 20 и 21 не реагируют на рабочие сигналы. В положении КОНТРО.ПЬ переключателя режимов 3, что соответствует подготовке к режиму функционального контроля системы, на входы кома1гдоаппаратов 10 подается через контакты 4-8 переключателя 3 контрольное напряжение, пониженное по отношению к напряжению блока 1 до величины, исключающей возможнесть срабатывания при контроле электромагни;тов 18 и 19, но достаточное для работы элементов контроля 20, 21 и срабатывания реле контроля 22, 23, при. подаче контрольного ситала и отсутствии неисправностей в соответствующем тракте управления. Одновременно через контакты переключателя 3 поступают сигналы на входы 42 элементов И 31 и зйпрещаюидае 43, 44 всех элементов ЗАПРЕТ 28, 29. В результате при подготовке к режиму функционального контроля запрещается поступление информащ И с выходов 45, 46 датчиков положения 24 и сигналы, поступающие через размыкающие контакты 35-34 всех реле контроля открытия 22 на входы 50 элементов ИЛИ 26, подаются на информационные входы 51 элементов ЗАПРЕТ 30, с выходов которых при этом подаются сигналы на входы закрытого положения 55 всех элементов индикации положения механизмов 25, что вызывает на пульте управления ин-дикацию исходного закрытого положения всех механизмов. При функциональном контроле тракта з равления открытием; механизма командоаппарат 10 переводится в положение ОТКРЫТЬ. Через контакты 11-12 контрольный сигнал от контрольного блока питания 2 при наличии Необходимых ситалов автоматического управления на выходах 33 логического блока 14 через выходные элементы 16 поступает в цепь электромагнита открытия 18. При отсутствии неисправности в тракте управления открытием механизма в элементе контроля 20 срабатывает реле контроля открытия 22, которое размыкает контакт 34-35 и замыкает контакт 35-36. При этом снимается сигнал с входа 50 элемента ИЛИ 26, входа 51 элемента ЗАПРЕТ 30 и входа закрытого положения 55 элемента индикации положения механизма 25. При этом также через контакт 35-36 реле контроля открытия 22 подается сигнал на вход 41 элемента И 31. что приводит к подаче сигнала на единичный вход 39элемента ПАМЯТЬ 32, который переходит в единичное состояние и выдает сигнал на вход 40элемента ИЛИ 27. В результате поступает сигнал на запрещающий вход 53 элемента ЗАПРЕТ 30, что исключает индикацию закрытого положения до перехода элемента ПАМЯТЬ в исходное нулевое состояние, и сигнал на вход открытого положения 54 элемента индикации положения механизма 25. При этом на мнемосхеме пульта управления гаснет, мнемознак закрытого положения и зажигается мнемознак открытого положения механизма, что сигнализирует об исправности тракта управления открытием механизма. При последующей установ ке команоаппарата 10 в нулевое положение контрольный сигнал отключается от цепи электроматита от16крытия 18, реле контроля открытия 22 вотвращается в исходное состояние, когда замкнут контакт 34-35 и разомкнут контакт 35-36. Однако, благодаря включению элемента ПАМЯТ 32 информация об открытом положении механизма на пульте управления сохраняется, что имитирует при контроле самоудержание механизма в Открытом положении после отмены команды на открытие механизма. При функциональном контроле тракта управления закрышем механизма командоаппарат 10 переводатся в положение ЗАКРЫТЬ. Через контакты П-12 контрольный сигнал от контрольного блока питания 2 при наливши необходимых сигналов автоматического управления на входах 33 логического блока 15 через выходные элементы 17 поступает в цепь электромагнита закрытия 19. При отсутствии неисправности в тракте управления закрытием механизма в элементе контроля 21 срабатьгоает реле контроля закрытия 23 и замыкает контакт 37, через который подается сигнал на нулевой вход 38 элемента ПАМЯТЬ 32, который переходит в исходное нулевое состояние. В результате снимается сигнал с входа 4Q элемента ИЛИ 27, с запреща ющего входа 53 элемента ЗАПРЕТ 30 и входа ; открытого положения 54 элемента индикации положения мехшшзма 25. Одновременно сигнал пocгyпaюuJJ й через контакт 34-35 на вход 50 элемента ИЛИ 26, через элемент ЗАПРЕТ 30 по дается на вход закрытого положения 55 элемен та индикации положения механизма 25. При этом на пульте управле1шя гаснет мнемознак открытого положения и зажимается мнемознак ; закрытого положения мехшшзма, что сигнализи рует об исправности тракта управления закрытием механизма. При последующей установке командоаппарата 10 в нулевое положение контрольный сигнал отключается от цепи электромагшиа закрытия 19, реле контроля закрытия 23 возвращается в исходаое состояние и размыкает контакт 37. В результате снимается сиг нал с нулевого входа 38 элемента ПАМЯТЬ 32 и схема устройства возвращается в исходное состояние подготовки к проведению функционального контроля системы, а на пульте управ ления сохраняется информация о закрытом положенин механизма, что имитирует при контроле самоудержание механизма в закрытом поло жении после отмены команды на закрытие механизма. Так как устройство реализует одинаково алгоритмы управления как в рабочем, так и в контрольном режиме, то достигается существен ное расширение функциональных возможностей также за счет того, что, кроме контроля исправ ности грантов управлетшя, в режиме функционального контроля системы можно проводать Я гренировку операторн но ги.толиеник гшерапий управления техническими средствами беч срабатывания механизмов. Таким образом, реализация устройства в системах автоматизированного управления позволяет без специальных тренажерных устройств проводить обучение персонала в перерывах функционирования системы по прямому назначению. При этом действия персонала и сигнализация на пульте управления в режиме контроля полностью аналогичны действиям и сигнализации в рабочем режиме. В результате в режиме функционального контроля наряду с контролем исправности системы осуществляется закрепление навыков персонала по четкому выполнению рабочих технологических операций, что способствует повыщению Эффективности и надежности управления. Формула изобретения Устройство для функционального контроля системы автоматизированного управления механизмами с самоудержанием, содержащее рабочий и контрольный блоки питания, переключатель режимов, последовательно соединенные командоаппараты, логические блоки, выходные элементы, исполнительные элемедты закрытия и открытия, датчики положения механизмов, выходы открытого и закрытого положений которьгх подключены к: информационным входам соответственно первых и вторых элементов ЗАПРЕТ, элементы индикации положения механизмов, реле контроля открытия и закрытия, обмотки которых через первый подвижный контакт переключателя режимов связаны с контрольным блоком питания, а замыкающие контакты реле контроля открытия соединены с первыми входами элементов И, вторые входы которых подключены к запрещаюлдам входам первых и вгорьгх элементов ЗАПРЕТ и второму подвижному контакту переключателя режимов, и первые элементы ИЛИ, первые входы которых соединены с выходами первых элементов ЗАПРЕТ, а выходы - с входами открытого полоЖжения соответствующих логических блоков и элементов индакации положе{сия механизмов, Отличающееся тем, что, с целью расишрегшя функциональных возможностей устройства, в него введены элементы ПАМЯТЬ, вторые элементы ИЛИ и третьи элементы ЗАПРЕТ, замыкающие контакты реле контроля закрытия подключень к нулевым входам элементов ПАМЯТЬ, к единичным входам которых подключены выходы элементов И, а к выходу втх рые входы первых элементов ИЛ11, с выходами которых связаны запрещающие т|)етьих
9690449
элементов ЗАПРЕТ, выходы которых подключены к входам закрытого положения соответствующих логических блоков и элементов индикации положения механизмов, а Информационные входы - к выходам вторых элементов ИЛИ, s кл. первые входы которых соединены с размыкающими контактами реле контроля открытия,кл. а вторые входы - с выходалда вторых элемен- тов ЗАПРЕТ.кл.
W
II Уп-раВленив и контроль
f /Зругаго механизма
10
Источники информации, принятые во внимание при эксперти-je
1.Авторское свидетельство СССР N 284639, В 63 Н 21/22, 1969.
2.Патент Великобритании № 1206954, Н 3 Т, 1970.
3.Авторское свидетельство СССР N 470795, G 05 В 23/02, 1973 (прототип).
КЗЗп
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для функционального контроля системы автоматизированного управления самовозвратными механизмами | 1977 |
|
SU708312A1 |
| Устройство функционального контроля системы автоматизированного управления | 1973 |
|
SU470795A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| Устройство для контроля и сигнализации о состоянии распределенных объектов | 1987 |
|
SU1608719A1 |
| Устройство для контроля каналов управления и сигнализации судовых энергетических установок | 1984 |
|
SU1177797A1 |
| Устройство для управления про-цЕССОМ ОСушЕНия СТОчНыХ КОлОдцЕВНА СудНЕ | 1979 |
|
SU796058A2 |
| Устройство для автоматического управления створками нулевой и разгрузочной площадок проходческого подъема | 1978 |
|
SU740929A1 |
| Устройство для управления судовым агрегатом | 1975 |
|
SU596995A1 |
| ПРИБОР КОНТРОЛЯ ЗНАНИЙ | 1994 |
|
RU2110096C1 |
| Система погрузки-выгрузки жидких грузов на судне | 1981 |
|
SU1064583A1 |
