(54) СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ МНОГОВАЛЬИОЙ ДИЗЕЛЬНОЙ УСТАНОВКОЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования многовальной судовой энергетической установки | 1978 |
|
SU749731A1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| КОРАБЛЬ ВОДОИЗМЕЩЕНИЕМ КЛАССА ЭСМИНЦА (ВАРИАНТЫ) | 2006 |
|
RU2300477C1 |
| Способ натурных испытаний безэкипажных судов | 2022 |
|
RU2797701C1 |
| Система для автоматического дистанционного управления многовальной дизельной установкой | 1972 |
|
SU490105A1 |
| КОРАБЛЬ ВОДОИЗМЕЩЕНИЕМ КЛАССА ФРЕГАТА | 2006 |
|
RU2311313C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| СПОСОБ УГЛОВОЙ ТОРПЕДНОЙ СТРЕЛЬБЫ С КООРДОНАТОМ | 2014 |
|
RU2565455C1 |
| Устройство для управления реверсом многовальной судовой дизельной установки | 1978 |
|
SU715387A2 |
| СПОСОБ НАТУРНЫХ ИСПЫТАНИЙ БЕЗЭКИПАЖНЫХ СУДОВ | 2020 |
|
RU2735694C1 |
Изобретение может быть а:с;по.п:ьзовано для управпекия судовыми многовальными установками, в частности прм управпенки всей установкой от одног: -з-ппалцего органа, при программном упразлекии скоростью хода судна, при управлении в режимах радио - и телеуправлекия к т.п.
Известна система для айгомагическог дистанционного упревпешгя ;-,1:ноговапьной дизельной установкой по авт.-. св № 490105, содержаща.1 б.-юки сравнения заданной и фактической скорсстей к njt;ковых и фа.ктических оборотов двигателей и форксйрователь управляю .цтх импульсов, выходы которого через логические блоки соединены с испытательным; механиамами. а входы сЬормироватепя тф.авляюших. импу.л.ьсов подключены к выхо.аам блоков
S сравне Гйя j
Недостатком известной системы является появляющаяся при ман«впе судна, например, циркуляции, реальная возможгносгь перегрузки двигателей и их выхода на работу по внешней характеристике.
. loro, .В нзвесгной системе не решалотся задачи з лучшения парамегров маневра, так лсак в силу того, что из.вестног система cTpeN-fHTCH поддерживать аацаинук- частоту вращения двт ателя постояньо.й и поворот корабля происходит только .поп действием руля, диаметр и .время циркуляции существенно увеличиваются ; ааяанн.ыи маневр может исказиться.
Цель изобретения -- повышение точноо и и кадежносги системы.
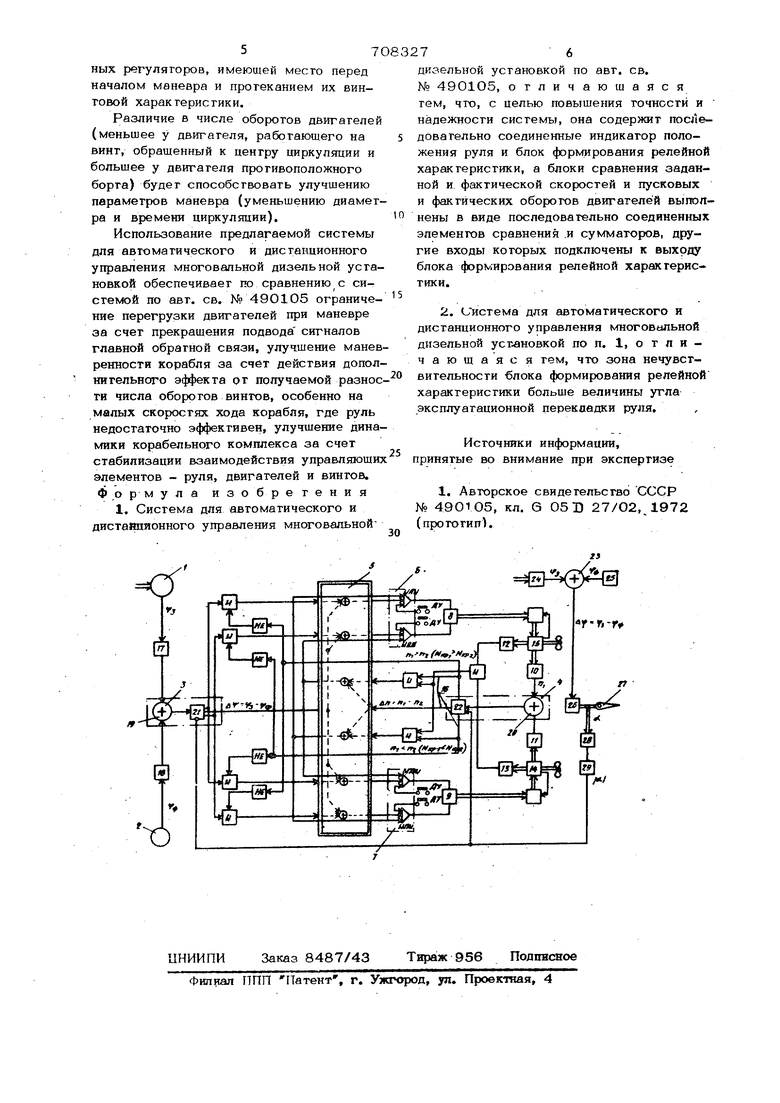
Поставленная цель достигается тем, что система для автоматического и дистанционного управления многовальной дизелько.й установкой по авт. св. № 490105 содеряшт последовательно соединенные индикатор положения руля и блок формирован ля релейной характеристики, а блогш сра.внения заданной и фактической скоростей н п сковых и фактических оборотов д.В1 гателей выполнены в зиде последовагельно соединенных элементов сравнения и сумматоров, другие входы котх)рых подключены к выходу блока формирования репейной характеристики, а также тем, что, зона нечувстви- тельносги блока формирования релейной характеристики больше величины угла эксплуатационной перекладки руля, На чертеже представлена структурная схема предлагаемой системы применител но к двухканальной корабельной установке, содержащей задатчик скорости корабля 1, датчик фактической скорости кораб ля 2, блок сравнения заданной и фактической скоростей корабля 3, блок сравнения пусковых и фактических оборотов двигателей 4, формирователь управляющих импульсов 5, логические блоки 6 и 7, исполнительные механизмы 8 и 9, датчики фактических оборотов двигат,елей 10 и 11J датчики пусковых оборотов двигателей 12 и 13, двигатели - 14 и 15,. командные линии связи 16, 1Я Зкочастотные фильтры 17 и 18, Блоки сравнения 3 и 4 соответствен но содержат элементы сравнения 19 и 20 и сумматоры 21 и 22, Схема также содержит дополнительны элемент сравнения 23, задатчик курсово го угла 24, датчик курсового угла 25, рулевой привод 26, руль 27, индикатор положения руля 28, блок формирования релейной характеристики 29, Работа системы происходит; следующ образом аналогично описанному в авт. ев, № 490105. При ходе корабля прямым выходной сигнал дополнительного элемента сравне ния 23 ЛМ , поступающий на рулевой привод 26, равен нулю и перо руля 27 находится в диаметральной плос кости корабля, либо перекладывается на небольшой угол ( ) для режима стабилизации курса и парирования влияния внешних возмущений. Выходной сигнал блока формирования релейной характерис тики 29 равен нулю, так как зона нечув ствительности блока формирования релей ной характеристики, по крайней мере, больше величины угла эксплуаталионной перекладки руля. При выполнении маневра, например, п руле 27, переложенном по сигналу зада тчнка курсового угла 24 на угол, бол ший угла эксплуатационной перекладки р ля и выходе корабля на циркуляцию, выходной сигнал блока формирования релей ной характеристики 29 становится рав,ным , В связи с увеличением сопротивления орабля и снижением КПД гребных винтов при косом обтекании скорость движения корабля на циркуляции становится ниже скорости при прямолинейном движении. Сигналы заданной H-j и фактической уменьшенной л скорости корабля поступают от-задатчика скорости корабля 1 и датчика фактической скорости корабля 2 на блок 3 сравнения фактической и заданной скоростей, однако сигнал рассогласования Д Ч в систему не поступит из-за наличия 1 на инверсном входе сумматора 21 и скорость движения корабля будет определяться его буксировочной кривой при криволинейном движении. Уставка, задания скоростного режима работы двигателя 14 и 15 не изменится и будет соответствовать координате задания, установленной до начала маневра корабля. Гребные винты корабля, кинематически связанные с двигателями 14 и 15, начинают работать в косых потоках, скорости которых различны. Винт, который находится на борту, обращенном к центру циркуляции, будет работать в потоке меньшей скорости, т.е. окружность, по которой перемещается этот винт, имеет меньший радиус, кроме того, этот винг будет работать в более интенсивном попутном потоке, вызванном непрямолинейным перемещением корпуса корабля. Винт противоположного борта будет работать в зоне повышенных скоростей (на окружности большего радиуса и фактически вне попутного потока). Ввиду этого двигатель работающий на винт, обращенный к центру циркуляции, нагружаться больше, чем двигатель противоположного борта и, вследствие имеющегося у всережимных регуляторов двигателей статизма число оборотов двигателя будет снижаться также больше (в частном случае, наружный по отношению к центру циркуляции двигатель может, вообще говоря, пов ысить число оборотов). Сигналы фактических оборотов двигателей 14 и 15 поступают от датчиков фактических оборотов двигателей 10 и 11 на блок сравнения пусковых и фактических оборотов двигателей 4, однако сигнал, рассогласования Д.И в систему не постуПИ7 из-за наличия 1 на инверсном входе сумматора 22 и выравнивания числа оборотов двигателей не произойдет. Скоростной режим работы двигателей будет определяться уставкой всережимных регуляторов, имеющей место перед началом маневра и протеканием их винговой характеристики. Различие в числе оборотов двигателе (меньшее у двигателя, работающего на винт, обращенный к центру циркуляции и большее у двигателя противоположного борта) будет способствовать улучшению параметров маневра (уменьшению диамет ра и времени циркуляции). Использование прзедлагаемой системы для автоматического и дистанционного управления многовальной дизельной уста новкой обеспечивает по сравнению с системой по авт. св. № 490105 ограничение перегрузки двигателей при маневре за счет прекращения подвода сигналов главной обратной связи, улучшение манев ренности корабля за счёт действия допол нительного эффекта от получаемой разнос ти числа оборотов винтов, особенно на малых скорюстях хода корабля, где руль недостаточно эффективен, улучшение дина мики корабельного комплекса за счет стабилизации взаимодействия управляющи элементов - руля, двигателей и винтов. Формул а изобре тени я 1, Система для автоматического и днстайпяонного управления многовальной дизельной установкой по авт. св. № 4901О5, отличающаяся тем, что, с целью повышения точности и надежности системы, она содержит последовательно соединенные индикатор положения руля и блок формирования релейной характеристики, а блоки сравнения заданной и фактической скорюстей и пусковых и фактических оборотов двигателей выполнены в виде последовательно соединенных элементов сравнения .и сумматоров, другие входы которых подключены к выходу блока формирования релейной характеристики. 2. (Система для автоматического и дистанционного управления многовильной дизельной установкой по п. 1,отличающаяся тем, что зона нечувствительности блока формирования релейной характеристики больше величины угла .эксплуатационной перекаадки руля, Источники информации, ринятые во внимание при экспертизе 1. Авторское свидетельство СССР 490105, кл. 6 05D 27/02,1972 (прототип).
