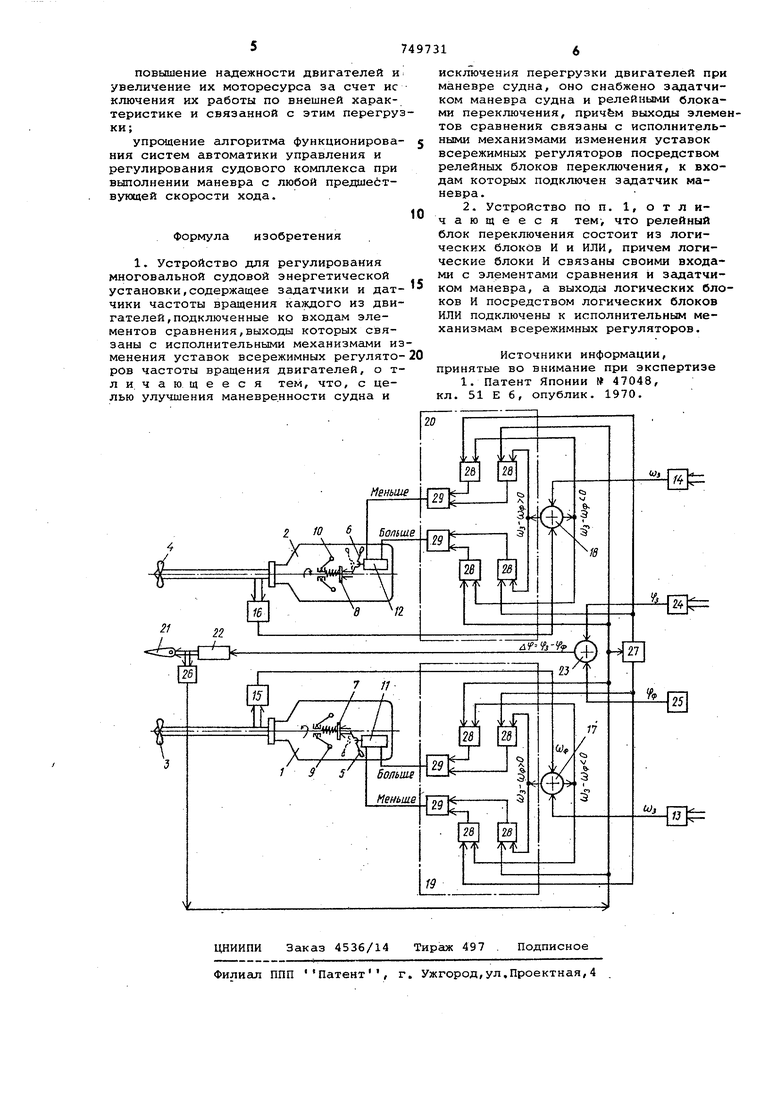
чены к входам элементов сравнения 17 и 18, выходы которых связаны посредством релейных блоков переключения 19 и 20 с исполнительными механизмами 11 и 12 изменения уставок всережимных регуляторов 9 и 10.
Управление судном по курсу осуществляется рулем 2i, привод 22 которого связан с выходом элемента сравнения 23, к входам которого подключены задатчики 24 и датчик 25 курсового угла и с задатчиком маневра 26 судна, например датчиком поворота пера руля.
Задатчик маневра 26 судна подключен к управляющим входам релейных блоков переключения 19 и 20, Для инвертирования выходного сигнала задатчика маневра 26 служит логический элемент НЕ 27, выходы которого также подключены к управляющим входам релейных блоков 19 и 20. Блоки 19 и 20 состоят из логических элементов И 28 и ИЛИ 29.
Устройство работает следующим образом.
При ходе судна прямым курсом выходной сигнал элемента сравнения 23 Рт,- Ч.р , поступающий на рулевой привод 22, равен нулю и перо руля 21 находится в диаметральной плоскости судна. Выходной сигнал задатчика маневра 26 равен нулю. Скоростной работы двигателей 1 и 2 энергетической установки судна определяется равенством заданной {(jJj) , снимаемой с задатчиком 13 и 14, и фактической (и)ф) , снимаемой с датчиков 15 и 16 частот вращения двигателей. При необходимости изменения скоростного режима работы установки увеличивают (уменьшают) сигнал задания (U)-,) с помощью задатчиков 13 и 14. Сигналы рассогласования )ф О () 0) с выходов элементов сравнения 17 и 18 .поступают на входы логических элементов И, входящих в .блоки переключения. Причем на вторых входах этих элементбв уже присутствует управляющий сигнал, снятый с выхода логического элемента НЕ 27. Выходы логических, элементов И посредством логических элементов ИЛИ. каналами БОЛЬШЕ (МЕНШЕ) связаны с исполнительными механизмами 11 и 12 изменения уставок всережимных регуляторов частоты вращения 9 и10 двигателей 1 и 2. Всережимные регуляторы 9 и 10 увеличивают (умень-ц1шот) подачу рабочего тока в двигателе до тех пор, пока сигнал рассогласования UJj - uj(j не станет равным йулю. Двигатели переходят на работу на новомскоростном режиме.
При выполнении маневра, например при руле 21, переложенном по сигналу задатчика.24 курсового угла, и выходе судна на циркуляцию выходной сигнал задатчика маневра 26 (датчика положения пера руля) -уже не равен нулю
.и оба его винта 3 и 4 начинают работать в к.осых потоках, скорости котоptox различны. Винт, который находит.ся на борту, обращенном к центру циркуляции, будет работать в потоке меньшей скорости, так как окружность по которой перемещается этот винт, имеет меньший радиус; кроме того, этот винт будет работать в более интенсивном попутном потоке, вызванном непрямолинейным перемещением корпуса судна. Винт противоположного борта будет работать в зоне повышенных скоростей (на окружности большего радиуса и фактически вне попутного потока Ввиду этого двигатель, работающий на винт, обращенный к центру циркуляции будет нагружаться больше, чем двигатель противоположного борта, и вследствие имеющегося у всережимных регуляторов двигателей статизма будет снижать СВОЮ частоту вращения также больше (в частном случае, наружный п отношению к центру циркуляции двигатель может, как было отмечено ранее, повысить свою частоту враидения) .
Сигналы фактической частоты вращения (Оф, снимаемые с датчиков 15 и 16, поступают на входы элементов сравнения 17 и 18, выходные сигналы которых (jj,, О или и з-иф7 О подаются на входы логических элементов И 28, входящих в блоки переключения 19 и 20. Причем на вторых входах эти элементов уже присутствует управляющий сигнал, снятый с выхода задатчика маневра 26. Выходы логических элементов И 28 посредством логических элементов ИЛИ 29 каналгхми МЕНЬШЕ (БОЛЬШЕ) связаны с исполнительными механизмами 11 и 12 изменения уставок всережимных регуляторов частоты вращения 9 и 10 двигателей 1 и 2.
Всережимные регуляторы 9 и 10 уменьшают (увеличивают) подачу рабо,чего тела в двигатели до тех пор, пока сигнал рассогласования bJ не станет равным нулю. Двигатели переходят на работу на новом скоростном режиме, причем -частота вращения двигателя, обращенного к центру циркуляции, будет меньшей, чем двигателя противоположного борта, что будет способствовать выполнению заданного маневра.
Изобретение обеспечивает следующие преимущества:
сокращение диаметра и времени выполнения маневра судна за счет действия дополнительного эффекта от получаемой разности частот вращения винтов, особенно на малых, скоростях ход судна, где руль недостаточно эффективен ;
улучшение динамики, судового комлекса за сче.т оптимизации взаимодействия управляющих элементов - руля,, двигателей и винтов;
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для автоматического и дистанционного управления многовальной дизельной установкой | 1977 |
|
SU708327A2 |
| Устройство для дистанционного управлениядВигАТЕлЕМ C PEBEPC-РЕдуКТОРНОй пЕРЕдАчЕй | 1978 |
|
SU838663A1 |
| Система дистанционного управленияСудОВОй СилОВОй уСТАНОВКОй | 1979 |
|
SU822146A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Способ реверсирования судового агрегата | 1983 |
|
SU1081073A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| Система автоматического дистанционногоупРАВлЕНия МНОгОВАльНОй СудОВОйэНЕРгЕТичЕСКОй уСТАНОВКОй | 1979 |
|
SU829479A1 |
| Устройство для управления реверсом многовальной судовой дизельной установки | 1978 |
|
SU715387A2 |
| Система управления судовым главнымдВигАТЕлЕМ и ВиНТОМ РЕгулиРуЕМОгОшАгА | 1979 |
|
SU844479A2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
