1
Изобретение относится к устройствам, предназначенным для прижатия геофизических датчиков к стенке скважины.
Из авт. ев, № 418600 известен привод, кинематическая схема которого содержит электромагнит, соединенный с ре дуктором через храповый механизм одностороннего действия. Выходной вал редуктора через кривошипно-шатунный механизм связан с упругим элементом,
При работе привода возратно- поступательное движение якоря электромагнита преобразуется во вращательное дв.ижение кривошипа, который совершает один цикл, проходя положения от крайнего верхнего до крайнего нижнего (поворот редуктора; под действием пружины),
Характер юй чертой известного ycTpoftства является то, что на выходном валу редуктора пружина создает переменный крутящий момент, величина которого зависит от шложения кривошипа относительно оси прибора и достигает максимального значения в момент когда усилие упругого элемента приложено к наибольшему пдечу. Недостаток конструкции привода в том, что ход якоря установлен таким образом, что усилие, развиваемое электромагнитом, достаточно для преодоления максимального кр тящего момента на. кривошипе. Причем ход якоря, а соответственно и развиваемое электромагнитное усилие остаются постоянными на протяжении всего циклaj в результате чего
0 при всех значениях крутящего момента на кривошипе, кроме максимального, электромагнит работает с недогрузкой.
Недогрузка тем больше, чем ближе кривошип к крайнему верхнему и нижнему положе5ниям, когда крутящий момент почти равен нулю.
Следствием постоянства величины хода якоря является ограничение быстродействия привода, так как при этом угловая скорость кривошипа остается постоянной на протяжении всего цикла. Кроме того, ограничение хода якоря электромагнита требует повышения количества срвер-
шаемых им BosBpaxHO-nocTjrnaTenbtibix движений за один цикл работы привода, что снижает долговечность последне1Х),
Целью изобретения является повьшюние быстродействия и долговечности привода.
Это достигается тем, что устройство снабжено кулачковым механизмом, причем его кулачок йсестко связан с кривошипом, а толкатель - с электромагнитом.
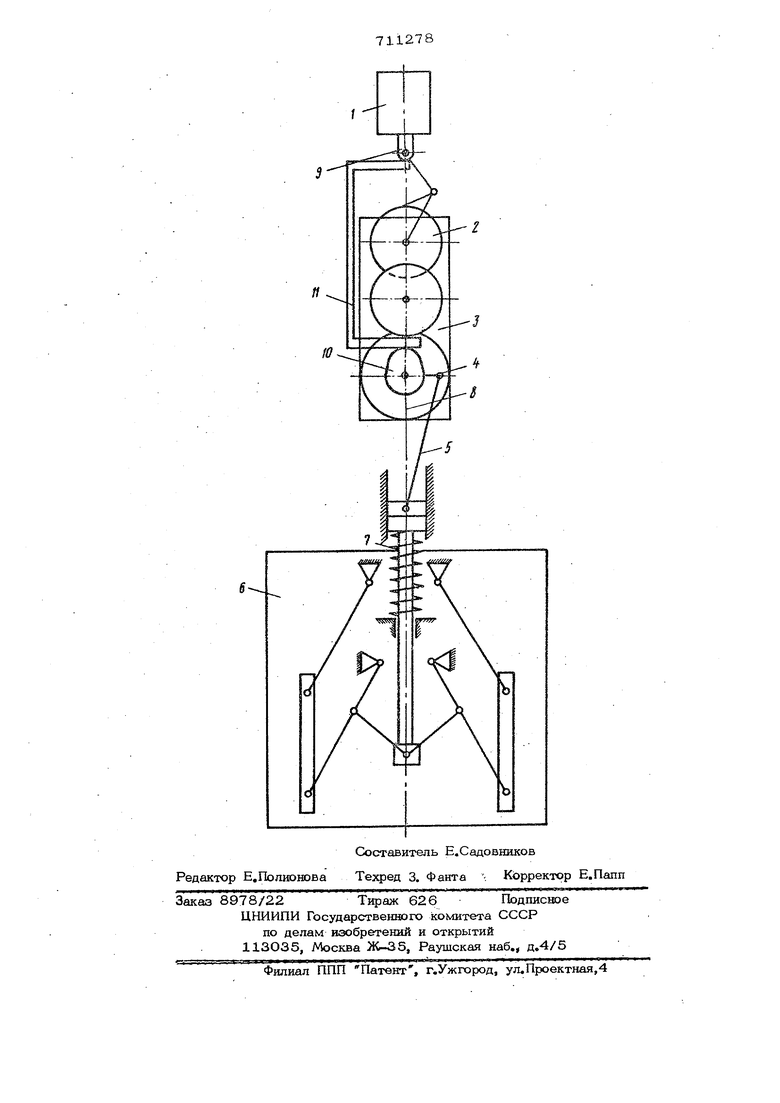
На чертеже изображен привод прижимнх)1Х) устройства геофизического скважинHOiX) прибора,.
Привод содержит элеетро магнит 1, который через храпоБый механизм 2 соединен с редуктором 3, PeayjiTOp 3 соединен черет кривошип 4 и-шатун 5 с рычажной системой 6, подпрулшнешюй пружиной 7. выходным ввлбм 8 ред ктора 3 и якорем 9 электромагнита 1 помещен кулачковый MexaiffiaMs кулачок 10 котороро сь-юнткгюван непосредствешю на,выходном валу 8, и верхний тор©ц толк.йте.дя 11 служит ограштаителем хода якоря 9„. Все элементы привода размещены в защитном кожухе, который ааполнен жвдКИМ диэг1ектриком и имеет ко шенсаарр давпезшя.
Устройство работает следующим об разом Кривошшт 4 наход ггся в крайнем верхнем гюложе1ши и под действием пруЖИ1Ш1 7 система рычагов 6 раскрывается иприжимает геофиз гаеаше цаучяккк. стенке скважины. В таком положении устройство находнтсй при вьшолнении исспедова ;шй.
Для закрытия снстемы рычагов после проведения д сследованйй кпи перед повторным спуском на обмотку электромагнита шздаются импульсы тока. Под дей этих импульсов якорь 9 электромагнита 1 совершает воевратно-доступатёльные движения и приводит в действие редуктор 3 через хреновый мехагшзм 2. Кривошш 4 постепенно из верхнего положеш1я переходит в юошее.Н через шатун 5 сжимает пружи,ну 7, Одновременно с кривошипом 4 поворачивается и купачок 10, который перемещает толкатель 11
И тем самым изменяет величину хода якоря 9 электромагнита 1, Когда на кривошип 4 действует максимальный крутящий момент (сила упругого элемента пружины 7 приложена к наибольшему плечу), кулачковый механизм задает якорю 9 минимальный ход. Электромагнит 1 в это время развивает максимальное усилие. Затем, когда Уменьшается крутящий мо мент на кривошипе 4 толкатель 11 кулачкового механизма задает больший ход якорю 9 электромагнита 1 и при приближещш кривошипа 4 к крайним верхнему и нижнему положениям величина хода максимальна. В момент, когда кривошип 5 приближается к 1шжнему крайнему полол{ению, прекращается подача импульсов тока,. а система рычагов 6 оказывается закрытой. В таком положении устройство транспортируется, опускается в скважину и под1шмается из неё хюсле вьшолнения исследований.
Для последующего раскрытия устройства достаточно в обмотку элект юмаг- нита .1 послать серию импульсов тока, носле чего кривошхш 4 минует крайнее нижнее доложеиие и происходит проворот шестерен редуктора 3 под действием пружины 7, тшс как этому не препятствует
храловый механизм 2,
Наличие в устройстве кулачкового ме хахшзма, расположещгого мелоду кривошипнО-шатунньш мёхашгамом и якорем электромагнита, поаволяет уменьшить износ
5 электромагнита, повысить срок ето службы и уменьшить время, необходимое для проведения исследований в сквансине.
Формула изобретени
я
Устройет-во для прижатия гео{})изических датчиков к стенке скважины по авт. св. Мэ 41860О, отличающееся тем, что с целью повышения быстродействия и долговечности, оно снабжено кулачковым механизмом, причем его кулачок жестко связан с кривошипом, а тол-:катель связан с электромагнитом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прижимное устройство геофизических датчиков | 1976 |
|
SU604978A1 |
| Привод прижимного устройства скважинного прибора | 1977 |
|
SU699163A1 |
| Устройство для прижатия геофизических датчиков к стенкам скважины | 1976 |
|
SU726315A1 |
| Центральный фотозатвор | 1975 |
|
SU526845A1 |
| Инклинометр | 1982 |
|
SU1102914A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕВЕРСИВНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2267857C2 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 1976 |
|
SU646545A1 |
| Револьверный суппорт токарного автомата | 1981 |
|
SU992124A1 |
| МЕХАНИЗМ ПРИВОДА ПУАНСОНА УЛЬТРАЗВУКОВОЙ ШВЕЙНОЙ МАШИНЫ | 2024 |
|
RU2829826C1 |
| Командоаппарат | 1984 |
|
SU1399833A1 |