00
со
S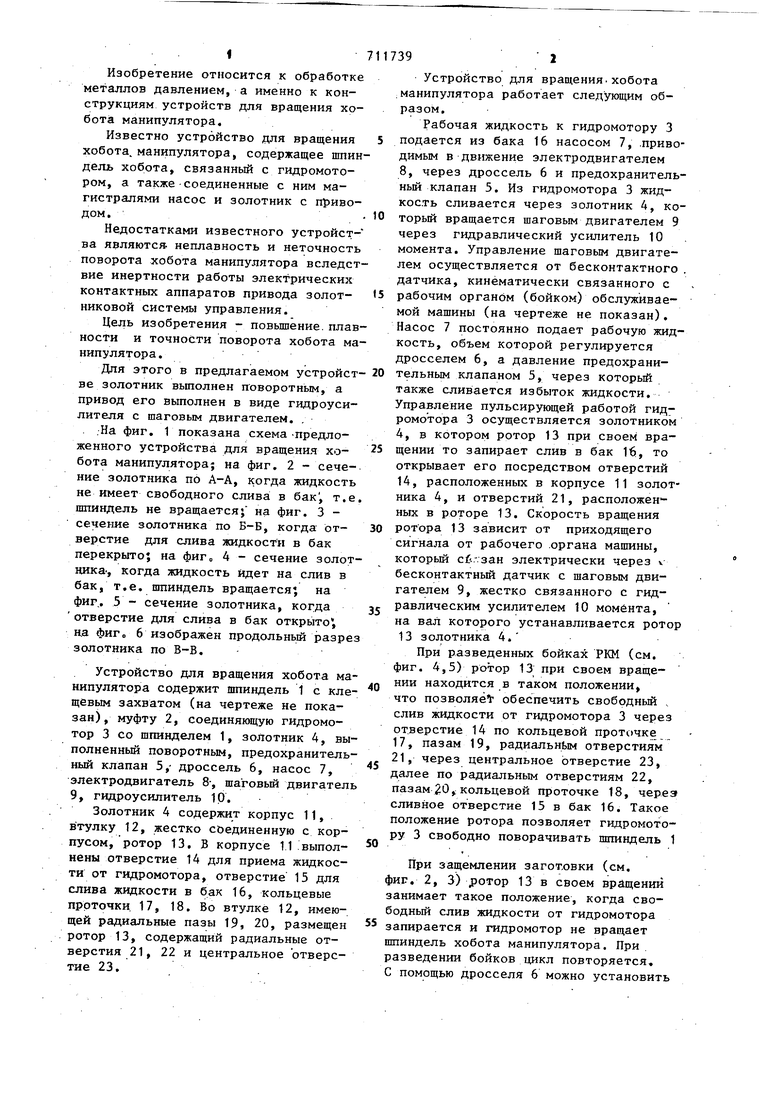

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА ПЛАТФОРМЫ СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2014 |
|
RU2583820C1 |
| Землеройная машина | 1982 |
|
SU1060771A1 |
| Устройство для вращения хобота манипулятора радиально-ковочной машине | 1975 |
|
SU713648A1 |
| Зажимная головка манипулятора | 1977 |
|
SU839137A1 |
| УСТРОЙСТВО для ВРАЩЕНИЯ ХОБОТА МАНИПУЛЯТОРА | 1973 |
|
SU365201A1 |
| Механизм вращения шпинделя зажимной головки манипулятора | 1978 |
|
SU811588A1 |
| ЛТНО- ff:J с *S ^ •'^^ TvXI'^4bGi:AS ^" БИаЛМОТЕКА | 1970 |
|
SU262633A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| Устройство для вращения хобота манипулятора | 1981 |
|
SU988439A1 |
| Устройство для завинчивания и отвинчивания болтовых рельсовых скреплений | 1985 |
|
SU1527358A1 |
УСТРОЙСТВО ДЛЯ ВРМ1ЕНИЯ ХОБОТА МАНИПУЛЯТОРА, содержащее шпиндель хобота, связанный с гидромото-- ром, а также соединенные с ним ма-;^ гистралями насос и золотник с приво- .дом, отличающееся тем, что, с целью повышения плавности и точности поворота хобота манипулятора, золотник выполнен поворотным, а привод его выполнен в виде гидроусилителя с шаговым двигателем.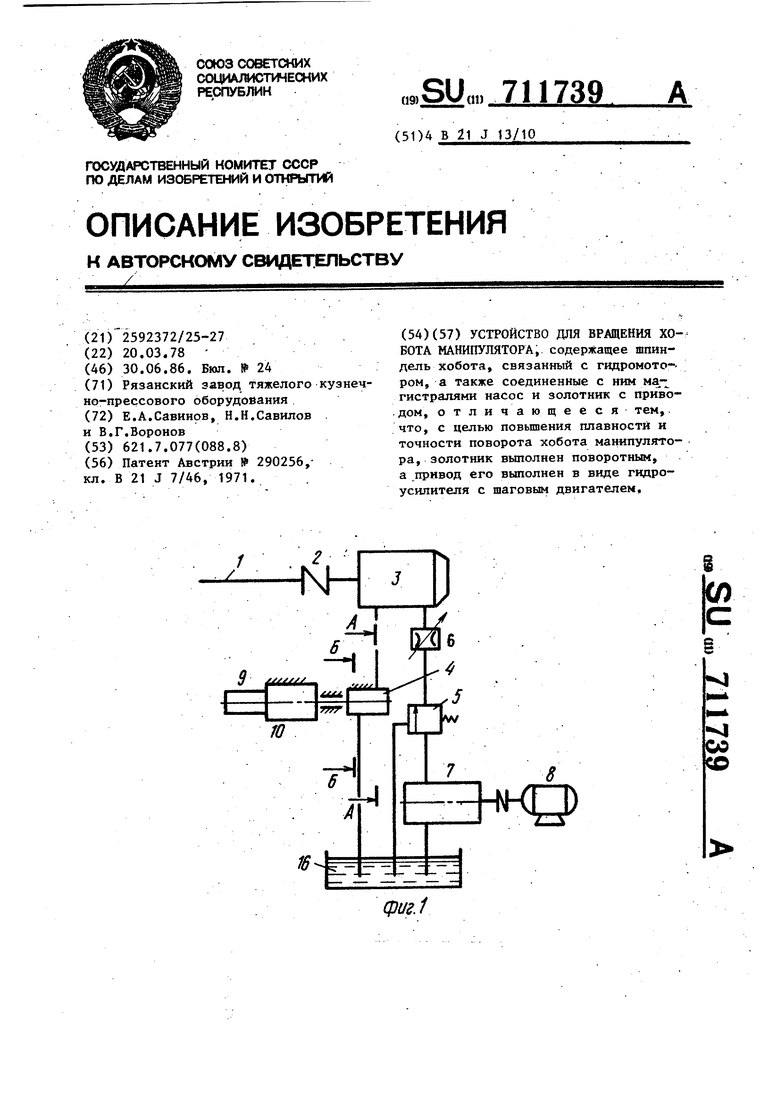
ф1/г. 1
I
Изобретение относится к обработке металлов давлением, а именно к конструкциям устройств для вращения хобота манипулятора.
Известно устройство для вращения хобота, манипулятора, содержащее шпиндель хобота, связанный с гидромотором, а также-соединенные с ним магистралями насос и золотник с приводом. .
Недостатками известного устройства являются- неплавность и неточность поворота хобота манипулятора вследствие инертности работы электрических контактных аппаратов привода золотниковой системы управления.
Цель изобретения - повьшение. плавности и точности поворота хобота манипулятора.
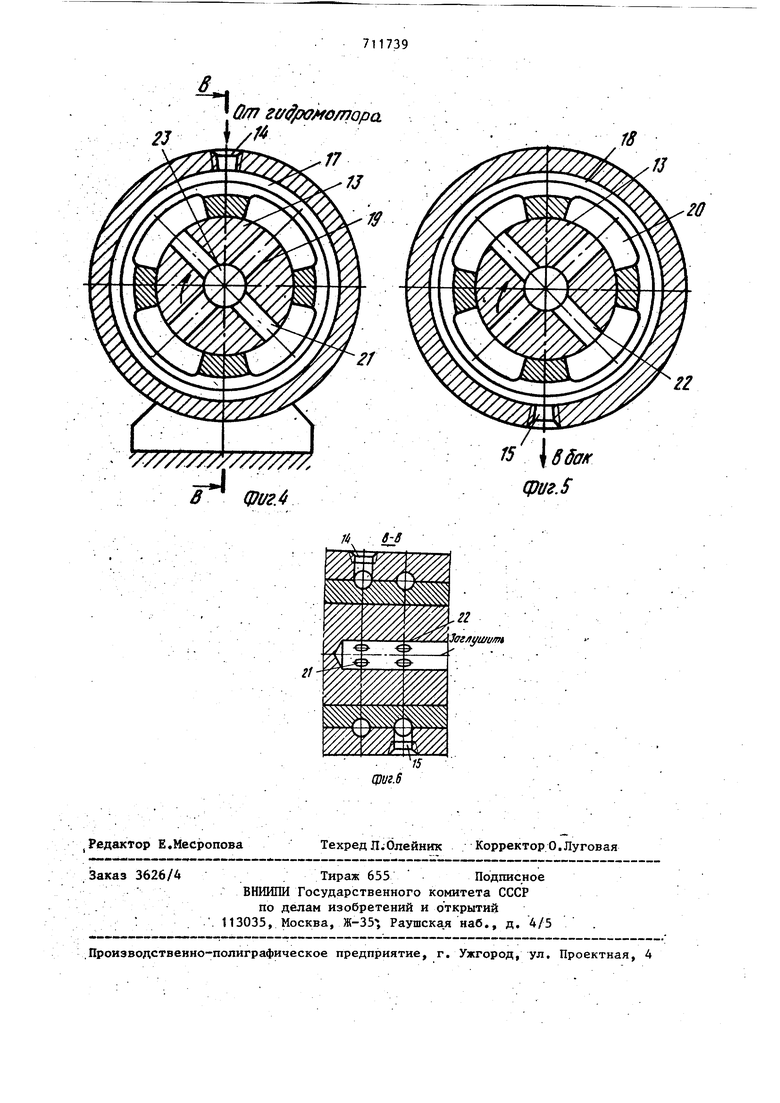
Для этого в предлагаемом устройстве золотник выполнен поворотньм, а привод его выполнен в виде гидроусилителя с шаговым двигателем. . . .На фиг. 1 показана схемаПредложенного устройства для вращения хобота манипулятора; на фиг. 2 - сечение золотника по А-А, когда жидкость не имеет свободного слива в бак , т.е шпиндель не вращается; на фиг. 3 сечение золотника по Б-Б, когда отверстие для слива жидкости в бак перекрыто; на фиг 4 - сечение золотника-, когда жидкость идет на слив в бак, т.е. шпиндель вращается; на фиг.. 5 - сечение золотника, когда отверстие для слива в бак открыто , на фиго 6 изображен продольный разре золотника по В-В.
Устройство для вращения хобота манипулятора содержит шпиндель 1 с клещевым захватом (на чертеже не показан), муфту 2, соединяющую гидромотор 3 со шпинделем 1, золотник 4, выполненный поворотным, предохранительный клапан 5,- дроссель 6, насос 7, электродвигатель 8-, шаговый двигатель 9, гидроусилитель 1р.
Золотник 4 содержит корпус 11, втулку 12, жестко соединенную с корпусом, ротор 13. В корпусе 11 выполнены отверстие 14 для приема жидкости от гидромотора, отверстие 15 для слива жидкости в бак 16, кольцевые проточки. 17, 18. Во втулке 12, имеющей радиальные пазы 19, 20, размещен ротор 13, содержащий радиальные отверстия 21, 22 и центральное отверстие 23.
392
Устройство для вращения, хобота ;манипулятора работает следующим образом.
Рабочая жидкость к гидромотору 3
подается из бака 16 насосом 7, .приводимым в движение электродвигателем 8, через дроссель 6 и предохранительный клапан 5. Из гидромотора 3 жидкость сливается через золотник 4, который вращается шаговым двигателем 9 через гидравлический усилитель 10 момента. Управление шаговым двигателем осуществляется от бесконтактного . датчика, кинематически связанного с
рабочим органом (бойком) обслуживаемой машины (на чертеже не показан). Насос 7 постоянно подает рабочую жидкость, объем которой регулируется дросселем 6, а давление предохранительным клапаном 5, через который также сливается избыток жидкости. Управление пульсирующей работой гидромотора 3 осуществляется золотником 4, в котором ротор 13 при своем вращении то запирает слив в бак 16, то открывает его посредством отверстий 14, расположенных в корпусе 11 золотника 4, и отверстий 21, расположенных в роторе 13. Скорость вращения
ротора 13 зависит от приходящего сигнала от рабочего .органа машины, который ct.-.зан электрически через v бесконтактный датчик с шаговым двигателем 9, жестко связанного с гидравлическим усилителем 10 момбнта, на вал которого устанавливается ротор 13 золотника 4.
При разведенных бойках РКМ (см. фиг. 4,5) ротор 13 при своем вращеНИИ находится в таком положении,
что позволяет обеспечить свободньй , слив жидкости от гидромотора 3 через от.верстие 14 по кольцевой проточке 17, пазам 19, радиальнЬм отверстиям 21, через центральное отверстие 23, далее по радиальным отверстиям 22, пазам 20,: кольцевой проточке 18, череэ сливное отверстие 15 в бак 16. Такое положение ротора позволяет гидромотору 3 свободно поворачивать шпиндель 1
При защемлении заготовки (см. фиг. 2, 3) ротор 13 в своем вращений занимает такое положение, когда свободный слив жидкости от гидромотора запирается и гидромотор не вращает шпиндель хобота манипулятора. При . разведении бойков цикл повторяется, С помощью дросселя 6 можно установить
такой поток жидкости, что шпиндель .1 будет вращаться очень медленно при вращении ротора 13 синхронно бойкам и это позволит использовать данную конструкцию в качестве микропривода для точной установки шпинделя в заданном положении при ковке квадратных заготовок или полосы. При одноУ////////////////////.
13
временном вращении заготовки в одну сторону двумя зажимными головками за противоположные концы можно легко синхронизировать их работу так, как они работают от одного и же датчика и предлагаемая конструкция позволяет исключить взаимное скручивание из-за рассогласования вращения.
0/77 ги ро о/прра.
V /
/7
Г9 фиг.2
11
18 О/Л (Mo/nopa Г4 Y///////////////7. Т Фиг.
1гг ;
Zi(3oi/tyu/umt cpi/e.S
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 0 |
|
SU290256A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
