I
Известно устройство для вращення .хобота манипулятора, содержащее установленные на шпинделе хобота гидромотор, соединенный нанорпой и сливной магистралями с встроенным в пих золотником с насосом, и датчики скорости вращения гидромотора н положения .хобота, взаимодействующие с золотником.
Повышение ироизводительиости достигается за счет того, что устройство снабжено встроенными между напорпой и сливной .магистралями двумя дополнительными магистралями с обратным клапаном в каждой, а также сливной магистралью обратиых клапанов с установленным в ней следяп пм электрогидравлическим дросселем, электрически связаиным с датчиком положения хобота и датчиком скорости вращения гидромотора.
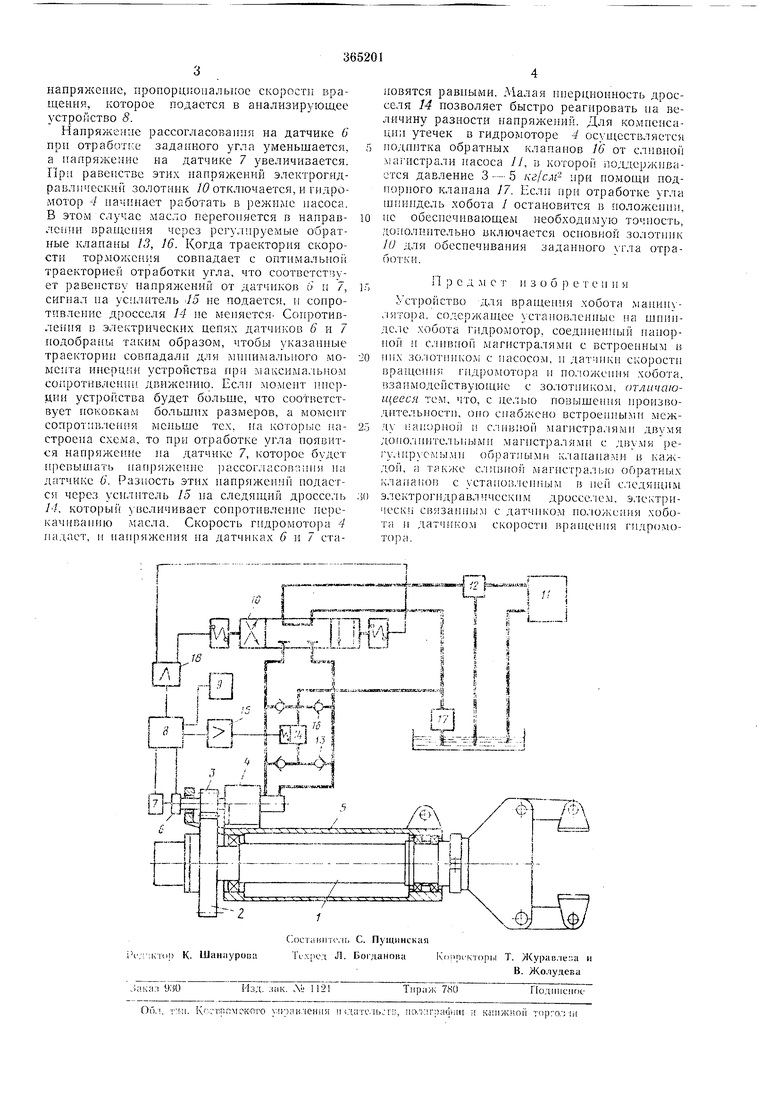
На чертеже представлена схе.ма данного устройства.
Устройство состоит из шнииделя хобота /, па ко1ще которого жестко закреплено зубчатое колесо 2, находящееся в зацеплении с шестерней 3, установленной на валу высокомомеитного гидромотора 4. Указанные узлы песет на себе рама 5 хобота. На валу гидромотора 4 установлен датчик 6 положения хобота и датчик 7 скорости вращения гидромотора, соедииенные с анализирующим устройством 8 н задающим устройством 9. Управление гидромотором 4 осуществляется от электрогидравлического золотника 10. Питание к гндромотору подается от насоса 11с предохранительным клапаном 12. Между напорной и сливной .магистралями гидромотора 4 встроены донолннтельные магистрали с двумя регулируемыми обратными клапанами 13 в каждой, допускающих слив из указанных магистралей нрп нревыщении давления в них выше заданного через следящий дроссель 14, встроениый в сливную .магистраль обратных клапапов, который работает от усилителя 15, соединенного с анализирующим устройством 8. Два обратных клапана 16 обеспечивают нодвод жндкости в сливную и напорную .магистрали
гидромотора 4 для ко.мненсацпп утечек от слпвной магистрали насоса У/, в которой установлен подпорный клапан 17. ноддерживающий давление 3 - 5 кг/см-. Управление золотником 10 осуществляется от апализирующего устройства S через усилитель 18 с фазоразличителем.
Установка необходимого угла на задающем устройстве 9 вызывает возникновение напряжения рассогласования на датчике 6 положеПИЯ хобота, которое нодается па анализирующее устройство 8 и усилитель 18 с фазоразличителем. При этом срабатывает электрогидр авлическп и золотннк W, н гндромотор 4 начинает вращаться в нужную сторону. При
разгоне гидромотора датчик 7 вырабатывает
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вращения хобота манипулятора | 1981 |
|
SU988439A1 |
| ЗАМКНУТЫЙ РЕВЕРСИВНЫЙ ОБЪЕМНЫЙ ГИДРОПРИВОД | 1970 |
|
SU259578A1 |
| ШПАЛОПОДБИВОЧНАЯ МАШИНА ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1962 |
|
SU145253A1 |
| Устройство для прореживания и прополки растений | 1980 |
|
SU949869A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2215911C1 |
| ГИДРОПРИВОД МЕХАНИЗМА ПОВОРОТА СТОЙКИ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2252911C2 |
| ГИДРООБЪЕМНАЯ ТРАНСМИССИЯ ДЛЯ КОЛЕСНЫХ САМОХОДНЫХ МАШИН | 1973 |
|
SU391952A1 |
| УСТРОЙСТВО для ВРАЩАТЕЛЬНОГО БУРЕНИЯ | 1973 |
|
SU394529A1 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407082A1 |
