Изобретение относится к кузнечно-прессовому машиностроению, а именно к конструкциям устройств для вращения хобота манипулятора к радиально-ковочным машинам.
Известно устройство для вращения хобота манипулятора, содержащее гидромотор, снабженный системой управления, состоящей из насоса,, гидроусилителя и датчиков электросигналов скорости врашения гидромотора а также узел определения угла поворота гидромотора 1.
Однако в процессе ковки происходит закручивание обрабатываемой заготовки, что свидетельствует о низкой точности работы.
Цель изобретения - повышение точности работы,
Для достижения цели в устройстве для вращения хобота манипулятора узел определения угла поворота гидромотора выполнен в виде взаимосвязанных барабана с контактным элементом, сигнализатора формирования сигнала управления от рабочего органа радиально-ковочной машины, а также катушки управления гидроусилителем, при этом на гидромоторе
1онтирован кулачок, взаимодействую-г щий с датчиками электросигналов скорости вращения гидромотора.
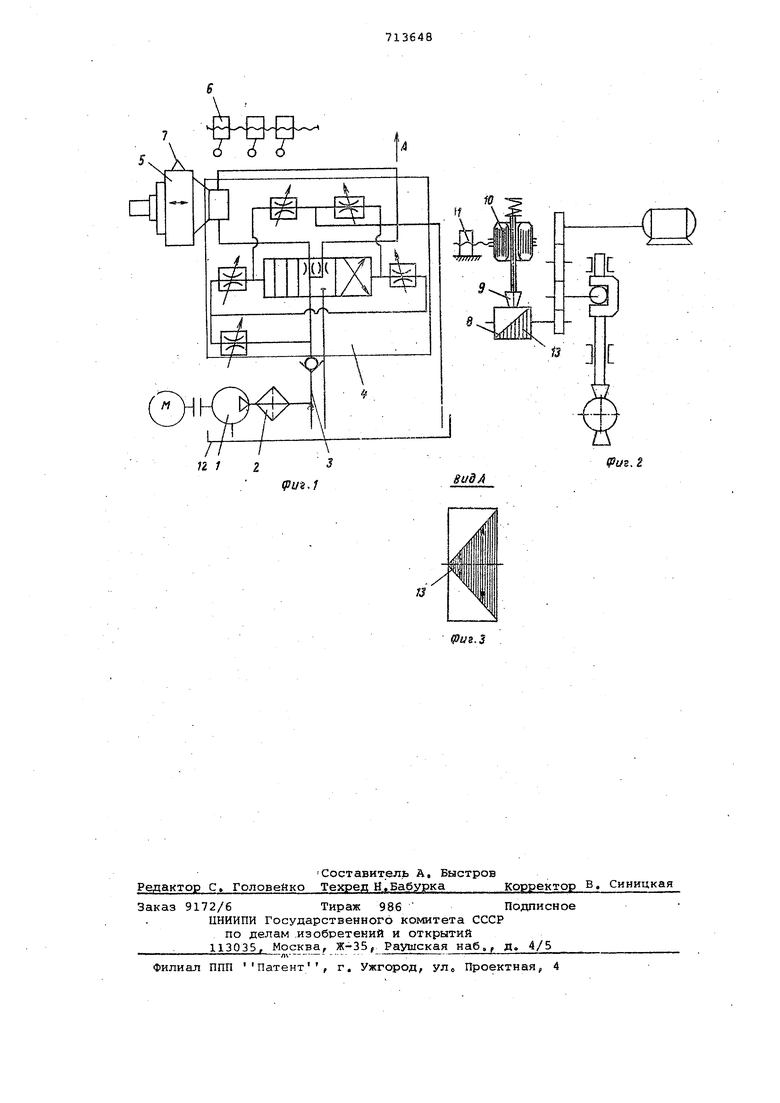
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - узел управления гидроусилителем мощности; на фиг. 3 - вид А фиг. 2.
Устройство для врашения хобота манипулятора к радиально-ковочной
0 машине (РКМ) содержит насос 1, фильтр 2, обратный клапан 3, гидроусилитель 4 мощности гидромотора 5, узел управления гидроусилителем, содержащий датчики б электросигна5лов скорости вращения гидромотора, установленные на станине мгшшны, кулачок 7, установленный на гидромоторе и взаимодействующий с датчиками б, узел определения угЛа пово0рота гидромотора, содержащий барабан 8, сигнализатор 9 формирования сигнала управления от рабочего органа РКМ, катушку 10 управления гидроусилителем, механизм 11 регули5ровки. Рабочая жидкость поступает в насос из бака 12, на барабане 8 установлен контактный элемент 13 клинообразной форлйл.
Устройство работает следующим об0разом.
Рабочая жидкость от насоса 1 че- рез фильтр 2 и обратный клапан 3 пост упает в рабочую магистраль Затем рабочая жидкость проходит гидроусилитель 4 мощности и поступает к гидромотору 5, вращающему хобот мэ. нипулятора Гидроусилитель 4 управляется по электросигналу механизмом управления гидроусилителя от датчиков 6 при воздействии кулачка 7 и по сигналу от сигнализатора 9 С барабаном 8 через катушку 10 управления
Рабочая жидкость, пройдя гидроусилитель 4 и гидромотор 5f сливается в бак 12.
При получении сигнала от датчика б гидроусилителем 4 последний сообщает гидромотору установленную программой скорость вращения хобота ма нипулятора РКМ,
Длительность вращения гидромотора 5 настраивается .с помощью датчиков б. Сигнализатор 9 посылает электрический импульс на катушку 10 управления гидроусилителем 4.
Длительность подаваемого сигнала от сигнализатора 9 устанавливается с помощью барабана.8 и контактного элемента 13, Положение сигнализатора 9 относительно .барабана 8 изменй ется с помощью механизма 11 регулировки, перемещающего сигнализатор 9 вдоль оси .барабана 8 чем изменя ется длина контактирующей поверхности пластины, а следовательно, и ,tyiHтельность сигнала управления,
Частота подаваемых к гидромотору 5 сигналов обеспечивается зубчатой |Передачей от привода бойков в зависимости- от числа их ударов.
Когда датчик 6 не посылает си1 нальных импульсов на катушку 10 управления гидроусилителя 4, последний устанавливается в нейтральное положение, и вращение гидромотора прекращается.
Использование предлагаемого устройства позволяет повысить точность работы за счет исключения закручивания заготовки в процессе ковки, что повышает точность получаемых на РКМ изделий.
Формула- изобретения
Устройство для вращения хобота манипулятора к радиально-ковочной машине, содержащее гндромотор, снабженный системой управления, состояшей из насоса, гидроусилителя и датчинов электросигналов скорости вращения гидромотора, а также узел оп. ределения угла поворота гидромотора отличающееся тем, что, с целью повыщения точности работы,
,узел определения угла поворота гидромотора выполнен в виде взаимосвязанных барабана с контактным элементом, сигнализатора формирования сигнала управления от рабочего органа
радиально-ковочной машины, а также катушки управления гидроусилителем,, при этом на гидромоторе смонтирован кулачок, взаимодействующий с датчикми электросигналов скорости вращения гидромотора, .
Источники информации, принятые во внимание при экспертизе
1 Авторское свидетельство СССР 365201, кл. В 21 J 13/10, 1970.
ГП I-1 I-I
M- H- -vt-vA .- 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вращения хобота манипулятора | 1978 |
|
SU711739A1 |
| Привод продольного перемещения тележки и хобота ковочного манипулятора | 1980 |
|
SU946775A1 |
| Привод продольного перемещения хобота ковочного манипулятора | 1981 |
|
SU997945A1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Устройство для вращения хобота манипулятора | 1981 |
|
SU988439A1 |
| Система автоматического управления гидравлическим прессом | 1974 |
|
SU720901A1 |
| Радиально-ковочная машина | 1986 |
|
SU1371750A1 |
| Устройство осевого перемещения хобота ковочного манипулятора | 1976 |
|
SU1038051A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОЛЫХ ПОКОВОК | 2010 |
|
RU2438826C2 |
| Способ управления ковочным манипулятором | 1978 |
|
SU724267A1 |
a:
/
О
M
т
2 3
n 1
(Pu.1
fuz.l
8 ид л
.3
