(54) УСТРОЙСТВО ДЛЯ ВРАЩЕНИЯ ХОБОТА МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ВРАЩЕНИЯ ХОБОТА МАНИПУЛЯТОРА | 1973 |
|
SU365201A1 |
| Привод продольного перемещения тележки и хобота ковочного манипулятора | 1980 |
|
SU946775A1 |
| Привод продольного перемещения хобота ковочного манипулятора | 1981 |
|
SU997945A1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
| Хобот ковочного манипулятора | 1977 |
|
SU725773A1 |
| Устройство вертикальной амортизации хобота манипулятора | 1976 |
|
SU607634A1 |
| Гидравлическая система управления механизмами перемещения тележки поворота хобота манипулятора | 1984 |
|
SU1155345A2 |
| Манипулятор | 1979 |
|
SU812412A1 |
| УСТРОЙСТВО для ПОДЪЕМА ХОБОТА КУЗНЕЧНОГО МАНИПУЛЯТОРА | 1972 |
|
SU351626A1 |
| Устройство для вращения хобота манипулятора | 1978 |
|
SU711739A1 |
1
Изобретение относится к вспомогательному оборудованию кузнечно-прессового производства, а именно к конструкциям кузнечных манипуляторов.
Известно устройство для вращения хобота манипулятора, содержащее подвиж- . ную раму, установленные на ней гидронасос, а также систему электрогидравлического- управления гидромотором, содержащую управляемый гидрораспределитель, датчики положения и скорости хобота, соединенные с усилителем и арифметическим устройством 1.
Недостатком известного устройства для вращения хобота манипулятора является неточность остановки хобот,а с поковкой при отработке заданного угла поворота, что приводит к повторному включению механизма и снижению производительности при ковке.
Цель изобретения - повыщение производительности при ковке и точности.
Цель достигается тем, что устройство для вращения хо($ота манипулятора, содержащее подвижную раму, установленные на ней гидронасос и связанный через зубчатую передачу с хоботом гидромотор, а также систему электрогидравлического управления гидромотором, содержащую управляемый гидрораспределитель, датчики положения и скорости хобота, соединенные с усилителем и арифметическим устройством, снабжено блоками коррекции и ввода задания, соединенными между собой арифметическим устройством, и дифференцирующим блоком, встроенными между усилителем и датчиками положения и скорости хобота, датчиком температуры, соединенным с блоком коррекции, а также датчиками давле10ния в полостях гидромотора, выходы каждого из которых связаны через блоки коррекции и ввода задания и непосредственно с арифметическим устройством, при этом арифметическое устройство соединено с выходом 15 дифференцирующего блока, а вход дифференц.рующего блока связан с выходом датчика корости.
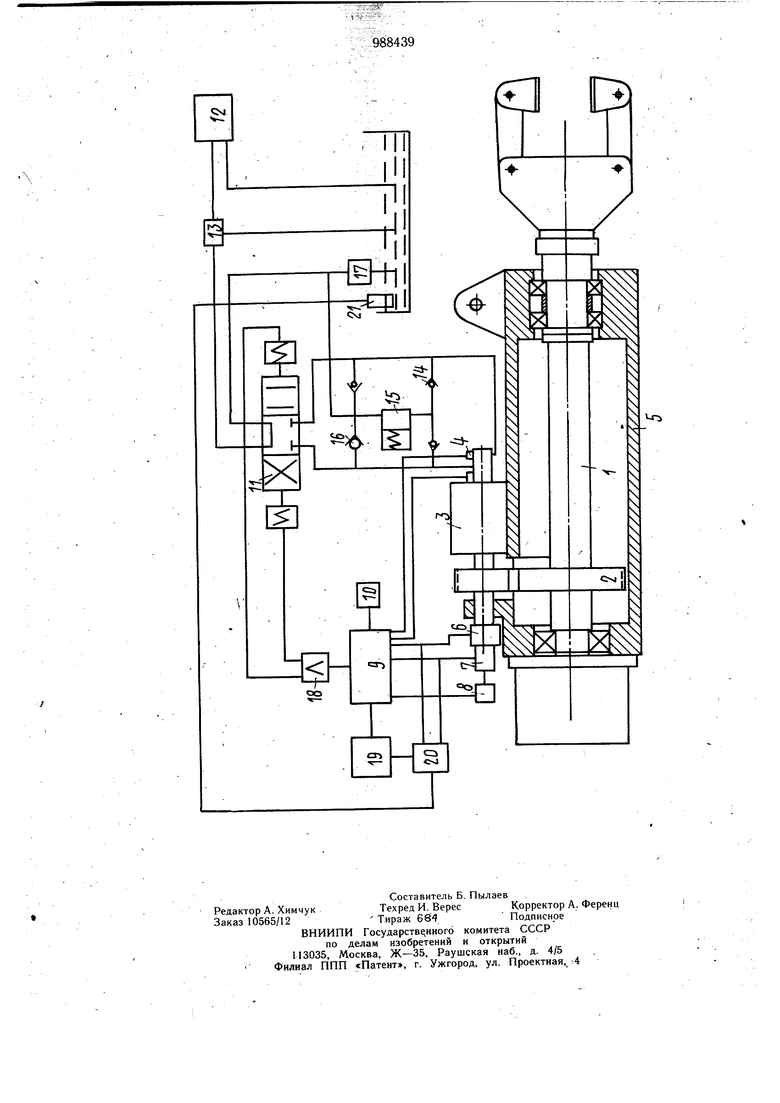
На чертеже схематически изображено предлагаемое устройство, общий вид.
Устройство содержит хобот 1, на котором жестко закреплено зубчатое колесо 2, находящееся в зацеплении с щестерней, установленной на валу гидромотора 3, в полостях которого установлены датчики 4 давления. Указанные узлы несет на себе рама 5 хобота. На валу гидромотора 3,установлен датчик 6 положения хобота и датчик 7 скорости, связанный с дифференцирующим блоком 8. Датчики 6 и 7 соединены с арифметическим устройством 9 и задающим 10. Унравление гидромотором 3 осуществляется от электрогидравлического золотника 11. Питание к гидромотору 3 подается от насоса 12 с предохранительным клапаном 13. Между напорной и сливной магистралями гидромотора встроены дополнительные магистрали с двумя регулируемы.ми обратными клапанами 14 в каждой, допускапщих слив из указанных магистралей при превыщении давления в них выше заданного при торможении через дроссель 15, встроенный в сливную магистраль обратных клапанов. Два обратных клапана 16 обеспечивают подвод жидкости в сливную и напорную магистрали гидромотора 3 для компенсаций утечек от сливной магистрали насоса 12, в которой установлен подпорный клапан 17, поддерживающий низкое давление. Управление золотником 11 осуществляется от арифметического устройства 9 через усилитель 18 с фазоразличителем. С арифметическим устройством связан блок 19 ввода задания, соединенный с блоком 20 коррекции, который связан с датчиками скорости и положения хобота и датчиком 21 температуры. Устройство для вращения хобота манипулятора работает следующим образо.м. Установка необходимого угла поворота поковки с хоботом 1 на задающем устройстве 10 вызывает возникновение напряжения рассогласования на датчике 6 положения хобота, которое подается через арифметическое устройство 9 и усилитель 18 с фазоразличителем. Дополнительный сигнал из-за неточности остановки хобота при предыдущей операции поворота поковки поступает также в арифметическое устройство через блоки ввода,задания 19 и коррекции 20. При этом срабатывает электрогидравлический золотник 11, и гидрОмотор 3 начинает вращаться в нужную сторону. При разгоне дифференцирующий блок 8 выдает сигнал, пропорциональный ускорению, в арифметическое устройство. Одновременно в арифметическое устройство 9 поступают сигналы от датчика скорости и от датчиков давления в полостях гидромотора. В конце разгона при установившейся скорости вращения от датчиков давления 4 в арифметическое устройство 9 поступают сигналы, позволяющие вычислить момент трения при вращении поковки. Арифметическое устройство по поступившим сигналам вычисляет приведенный момент инерции вращающихся частей механизма вращения хобота с поковкой и запас кинетической энергии, которые необходимы для расчета угла торможения механизма вращения. Значение момента торможения берется при расчете из запоминающего устройства блока ввода задания, значение которого корректируется блоком коррекции по значениям установивщейся скорости вращения и температуры масла в гидросистеме, так как в блоке ввода задания имеется значение тормозного момента, определенного по давлению срабатывания дросселя 15 при торможении с одного значения установивщейся скорости вращения при определенной температуре. Расчетный угол торможения сравнивается с углом поворота датчика 6 положения хобота и при их равенстве арифметическое устройство 9 отключает электромагнит золотника 11, что приводит устройство в режим торможения. Во время ковки поковка удлиняется. Это приводит к уменьщению приведенного момента инерции вращающихся частей, к увеличению момента трения и уменьщению расчетного углаторможения. Таким образом, предлагае.мое устройство для вращения хобота манипулятора обеспе-. чивает по сравнению с прототипом повышение производительности и точности при ковке за счет отсутствия повторного включения механизма для дополнительного поворота поковки на требуемый угол. Формула изобретения Устройство для вращения хобота манипулятора, содержащее подвижную раму, установленные на ней гидронасос и связанный через зубчатую передачу с хоботом гидромотор, а также систему электрогидравлического управления гидромотором, содержащую управляемый гидрораспределитель, датчики положения и скорости хобота, соединенные с усилителем и арифметическим устройством, отличающееся тем, что, с целью повыщения производительности и точности при ковке, оно снабжено блоками коррекции и ввода задания, соединенными между собой арифметическим устройством, и дифференцирующим блоком, встроенцыми между усилителем и датчиками положения и скорости хобота, датчиком температуры, соединенным с блоком коррекции, а также датчиками давления в полостях гидромотора, выходы каждого из которых связаны через блоки коррекции и ввода задания и непосредственно с арифметическим устройством, при этом арифметическое устройство соединено с выходом дифференцирующего блока, а вход дифференцирующего блока связан с выходом датчика скорости. Источники информации, принятые во внимание при. экспертизе . Авторское свидетельство СССР № 338293, кл. В 21 J 13/10, 1970 (прототип).
