54) СМЕСИТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Смеситель | 1980 |
|
SU946633A1 |
| Аппарат для получения вязких смесей | 1978 |
|
SU778763A1 |
| Аппарат для получения смеси сыпучих и жидких материалов | 1977 |
|
SU631187A1 |
| Смеситель | 1982 |
|
SU1063450A1 |
| Смеситель порошковых материалов | 1984 |
|
SU1225612A1 |
| Аппарат для получения смесей различной вязкости | 1976 |
|
SU580889A1 |
| Смеситель | 1985 |
|
SU1278237A1 |
| Аппарат для получения смесей различной вязкости | 1977 |
|
SU625756A2 |
| Смеситель | 1983 |
|
SU1151288A1 |
| Смеситель | 1983 |
|
SU1150015A1 |
Изобретение .относится к области смесительной техники и предназначено для интенсификации процесса перемешивания. Смеситель может быть применен в различных отраслях промышленности, наприглер, химической, строительных материалов, фармацевтической и т.д.
Известны смесители с циклоидальным движением мешалок, в которых за счет перемещения мешалок по сложным траекториям .полностью устраняются застойные зойы и увеличивается производительность при высоком качестве готовой продукции 1 и 2.
В таких смесителях циклоидальное движение мешалок обеспечивается специальной конструкцией приводов, которые состоят из. двигателей и о различных систем зубчаторычажных механизмов. При этом режиме работы мешалок, линейные скорости движения осей мешалок и угловые скорости вращения мешалок вокруг собственных осей либо задаются по опреде.пенной программе оператором, либо самонастраиваются при заданной скорости вала двигателя в завиеимости от.сопротивления перемешиваемых материалов.
Недостатком сущ.ествующих смесителей является относительная конструктивная сложность применяемых приводных систем и невозможность обеспечения раздельного саморегулирования величин линейных-и угловых скоростей движения мешалок, что приводит к повышенным энергозатратам на перемешивание и ограничению адаптивной
0 .самонастраивающейся) способности работы смесителей.
Наиболее близким по технической сущности и достигаемому результату т предложенному является аппарат для 5 получения смесей различной вязкости содержащий размещенные в корпусе вертикальные мешалки, соединенные с валом двигателя посредством двухступенчатого планетарного зубчато-рычаж0ного механизма, обеспечивающего циклоидальное движение мешалок. Поводки второй планетарной ступени механизма установлены на валах сателлитных колес первой планетарной ступени с
5 возможностью свободного вращения 3.
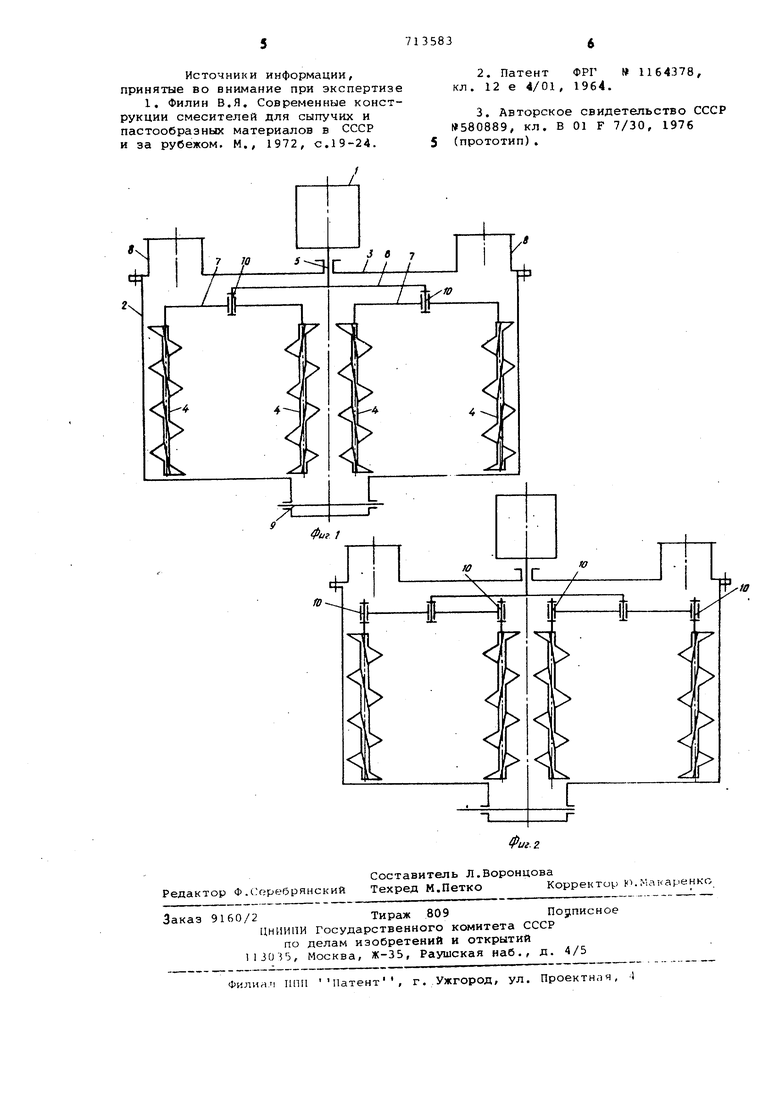
Однако для этого смеси-теля характерны конструктивная сложность и невозможность осуществления раздельного саморегулирования величин линейных и угловых скоростей движения мешалок в зависимости от изменяющихся величи сопротивления перемешиваемой среды Изменение, например, линейной скорос ти движения осей гу ешалок за собой обязательное изменение угловой скорости вращения. Это приводит к увеличению общих энергозатрат на пер мешивание и препятствует рациональн му- самоперераспределению подаваемой энергии внутри перемешиваемой массы между двумя видами движений мешалок что снижает производительность смеси теля при получении продукта заданног качества. Цель изобретения - снижение энерг затрат на перемешивание. Это достигается тем, что механизм обеспечивающий планетарное движение мешалок, выполнен в виде кинематичес кой цепи, содержащей кривошип, соеди ненный с валом привода, и шатуны, установленные на кривошипе с возможностью проворачивания на полный оборот, при этом мешалки ук-реплены на противоположных концах шатунов на равных расстояниях от мест крепления шатуна к кривошипу, а также тем, что мешалки установлены на шатунах с возможностью свободного вращения. На фиг.1 показан смеситель, прин ципиальная схема; на фиг.2 -- то яе, со свободно установленными на шатунах мешалками. Смеситель содержит двигатель 1, корпус 2, крыыку 3, мешллки 4, разме щенные в корпусе, вал 5 двигателя,кривошип 6, шатуны 7, загрузочные бункеры 8, разгрузочное устройство и шарниры 10. Кривошип жестко соединен с валом 5 двигателя 1, шатуны 7 установлены в шарнирах 10 на кривошипе б с возможностью свободного проворачивания на полый оборот, мешалки 4 установлены на противоположных концах кажд го шатуна 7 на равных расстояниях от мест крепления шатуна к кривошипу На фиг.1 показаны мешалки, жестко соединенные с шатунами, -на фиг,2 по заны мешалки, подвижно установленны на шатунах в шарнирах 10, Количеств мешалок может быть равным, например четырем, количество шатунов, например, двум. Загрузка и выгрузка производятся соответственно через бункер а 8 и устройство 9. Смеситель работает следующим образом. Вращение от двигателя I пере.дает через вал 5 на кривошип 6,При враще нии кривошипа б шатуны 7 в зависимо ти от сопротивления перемешиваег ой среды могут либо вращаться совместн с кривошипом, либо приобретать допо нительную угловую скорость вращения относительно крнвоиаипа, обеспечивая тем саг-КлМ циклоида.пьное движение мешалок с некоторой линегйной скоростью. Дополнительное вращение шатунов относительно кривошипа обеспечивается за счет возникновения разных по величине сил сопротивления движению мешалок, установленных на противоположных концах шатунов. Для создания равномерного вращения расстояния между точками крепления мешалок и местом крепления шатуна к кривошипу должны быть равными. Мешалки 4 за счет свободной установки в шарнирах 10 на шатунах 7 в зависимости от величины сопротивления перемешиваемой массы могут также приобретать различную по величине угловую скорость вращения вокруг собственных осей. Таким образом, происходит раздельная саморегулировка кинематических пара.метров движения мешалок. Простота предлагаемой конструкции смесителя, отличающегося от известных типов наличием нескольких рычагов и низших кинематических пар, обеспечивает незначительные материальные затраты на его изготовление. При этом сохраняются все достоинства аналогичных смесителей с циклоидальным движением мешалок и добавляется новое положительное качество в виде свойства полной адаптации режимов движения мешалок к изменению физико-механических свойств перемешиваемых материалов. Это позволяет сделать вывод о высоких техникоэкономических показателях предлагав-, мого смесителя. Формула изобретения Х.Смеситель, содержащий корпус с ввртикаль ыми мешалками, привод, вал которого соединен с мешалкой посредством механизма г обеспечивающего их планетарное движение, отличающийся тем, что, с целью сниженияэнергозатрат на перемешивание, механизм, обеспечивающий планетарное движение мешалок, выполнен в виде кинематической цепи, содержащей кривошип, .соедйьГенный с валом привода и шатуны, установленные на кривошипе с возможностью проворачивания на полный оборот, при этом мешалки укреплены на противоположных концах шатунов на равных расстояниях от мест крепления шатуна к крив ошипу. 2. Смеситель по п.1, отличающийся тем, что, с целью обеспечения раздельного саморегулирования кинематических параметров движения мешалок в зависимости от сопротивления перемешиваемых материалов, мешалки установлены на luaтунах с возможностью свободного вращения.
Источники информации, принятые во внимание при экспертизе 1. Филин В.Я. Современные конструкции смесителей для сыпучих и пастообразных материалов в СССР и за рубежом, М., 1972, с.19-24.
(прототип) .
