умножения через ключевую схему и коммутирующий блок соединеныС блоком индикации, причем к управляющему входу ключевой схемы подключен«датчик фиксации натяжения грузового троса, а преобразователь угла поворота экскаватора соединен с коммутирующим блоком.
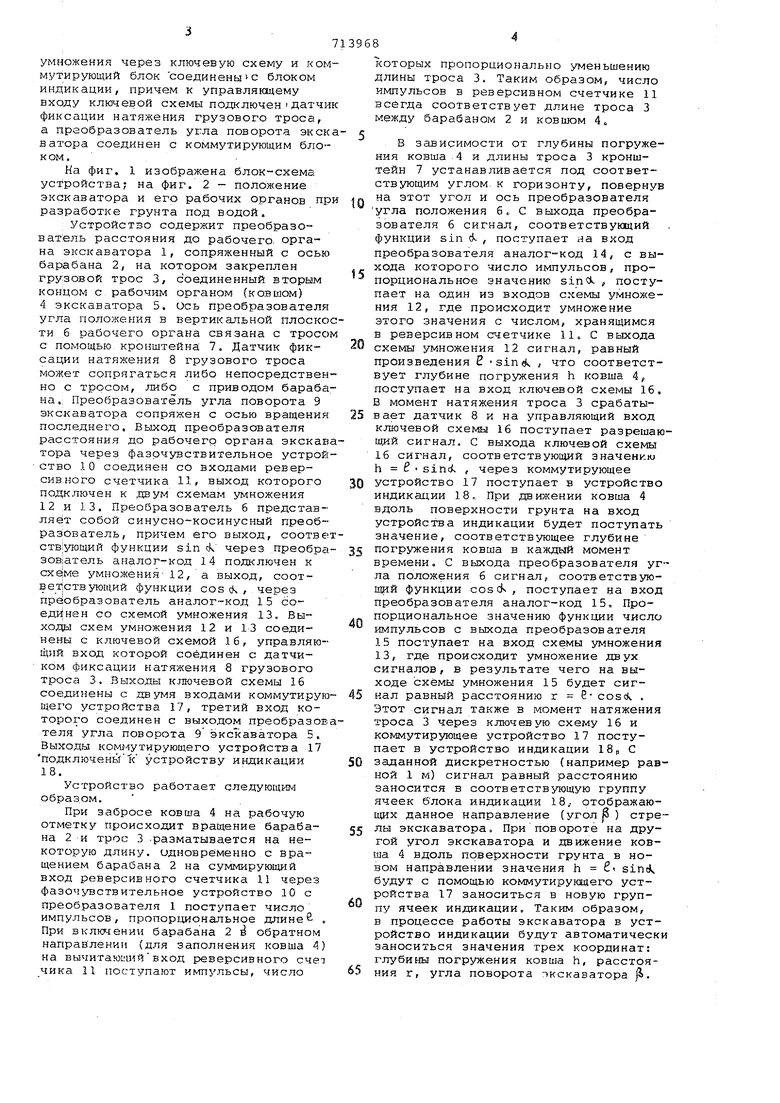
На фиг, 1 изображена блок-схема устройства на фиг. 2 - положение экскаватора и его рабочих органов при разработке грунта под водой.
Устройство содержит преобразователь расстояния до рабочего, органа экскаватора 1, сопряженный с осью барабана 2, на котором закреплен грузовой трос 3, соединенный вторым концом с рабочим органом (ковшом) 4 экскаватора 5. Ось преобразователя угла положения в вертикальной плоскости 6 рабочего органа связана с тросом с помощью кронштейна 7. Датчик фиксации натяжения 8 грузового троса может сопрягаться либо непосредственно с тросом, либо с приводом барабс1на.; Преобразователь угла поворота 9 экскаватора сопряжен с осью вращения последнего. Выход преобразователя расстояния до рабочегр органа экскаватора через фазрчувствительное устройство 10 соединен со входами реверсивного счетчика 11, выход которого подключен к ,цвум схемам умножения 12 и 13. Преобразователь б представляет собой синусно-косинусный преобразователь, причем его выход, соответств:ующий функции sin ck через .преобразов1атель аналог-код 14 подключен к схеме умножения- 12, а выход, соответ;ствующий функции cos ck , через преобразователь аналог-код 15 соединен со схемой умножения 13. Выходы схем умножения 12 и 13 соединены с ключевой схемой 16, управляющий вход которой соединен с датчиком фиксации натяжения 8 грузового троса 3, Выходы ключевой схемы 16 соединены с двумя входами коммутирующего устройства 17, третий вход которого соединен с выходом преобразовтеля угла поворота 9 экскаватора 5. Выходы ком11утирующего устройства 17 подключенык устройству индикации 18.
Устройство работает следующим образом.
При забросе ковша 4 на рабочую отметку происходит вращение барабана 2 и трос 3 .разматывается на некоторую длину, идновременно с вращением барабана 2 на суммирующий вход реверсивного счетчика 11 через фаэочувствительное устройство 10 с преобразователя 1 поступает число импульсов, пропорциональное длине & . При включении барабана 2 обратном направлении (для заполнения ковша 4) на вычитам1чий вход реверсивного счет чика 11 юступают импульсы, число
которых пропорционально уменьшению длины троса 3. Таким образом, число импульсов в реверсивном счетчике 11 всегда соответствует длине троса 3 между барабаном 2 и ковшом 4
В зависимости от глубины погружения ковша 4 и длины троса 3 кронштейн 7 устанавливается под соответствующим углом к горизонту, повернув на этот угол и ось преобразователя угла положения 6„ С выхода преобразователя 6 сигнал, соответствующий функции sin d. , поступает на вход преобразователя аналог-код 14, с выхода которого число импульсов, пропорциональное значению , поступает на один из входов схемы умножения 12, где происходит умножение этого значения с числом, хранящимся в реверсивном счетчике 11. С выхода схемы умножения 12 сигнал, равный произведения 2 -sinck , что соответствует глубине погружения h ковша 4, поступает на вход ключевой схемы 16, В момент натяжения троса 3 срабатывает датчик 8 и на управляющий вход ключевой схемы 16 поступает разрешаюшлй сигнал. С выхода ключевой схемы 16 сигнал, соответствующий значению h S sinrf- , через коммутирующее устройство 17 поступает в устройство индикации 18„ При движении ковша 4 вдоль поверхности грунта на вход устройства индикации будет поступать значение, соответствующее глубине погр5 ения ковша в каждый момент времени. С выхода преобразователя угла положения 6 сигнал, соответствующий функции cos ds , поступает на вход преобразователя аналог-код 15 Пропорциональное значению функции число импульсов с выхода преобразователя 15 поступает на вход схемы умножения 13, где происходит умножение двух сигналов, в результате чего на выходе схемы умножения 15 будет сигнал равный расстоянию г 2 cosck . Этот сигнал также в момент натяжения троса 3 через ключевую схему 16 и коммутирующее устройство 17 поступает в устройство индикации 18„ С заданной дискретностью (например равной 1 м) сигнал равный расстоянию заносится в соответствующую группу ячеек блока индикации 18, отображающих данное направление (угол ) стрелы экскаватора. Приповороте на другой угол экскаватора и движение ковша 4 вдоль поверхности грунта в новом направлении значения h S sinA. будут с помощью коммутиругацего устройства 17 заноситься в новую группу ячеек индикации. Таким образом, в процессе работы экскаватора в устройство индикации будут автоматическ заноситься значения трех координат; глубины погружения ковша h, расстояния г, угла поворота -жскаватора ji.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления драглайном | 1977 |
|
SU682607A1 |
| Тренажер машиниста одноковшового экскаватора | 1986 |
|
SU1350659A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ С НЕВЫДВИЖНОЙ СТРЕЛОЙ | 1966 |
|
SU214641A1 |
| Устройство для учета работы транспортного оборудования | 1984 |
|
SU1182123A2 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
| Цифровой измеритель температуры | 1987 |
|
SU1536220A1 |
| Устройство для считывания графической информации | 1985 |
|
SU1293743A1 |
| УСТРОЙСТВО для КОНТРОЛЯ РАБОТЫ ЭКСКАВАТОРА | 1972 |
|
SU327306A1 |
| РАСХОДОМЕР ТОПЛИВА | 1992 |
|
RU2014569C1 |
