Известны устройства для автоматического управления роторным экскаватором с невыд-вижной стрелой, которые позволяют перемещать роторное колесо по заданной программе.
Предложенное устройство позволяет осуществлять селективную выемку полезных ископаемых.
B нем дополнительно установлены цифровой программоноситель, подключенный к устройству управления, и привод отработки соотношения скоростей приводов подъема и поворота роторной стрелы с устройством сравнения кодов соотношения скоростей приводов и жестко связанными между собой непрерывно-дискретным преобразователем, сервоприводом и устройством определения требуемой скорости подъема стрелы. Устройство сравнения кодов подключено к устройству управления, а выход привода угла поворота - к устройству определения требуемой скорости подъема, выход которого подсоединен к схеме управления приводом подъема стрелы.
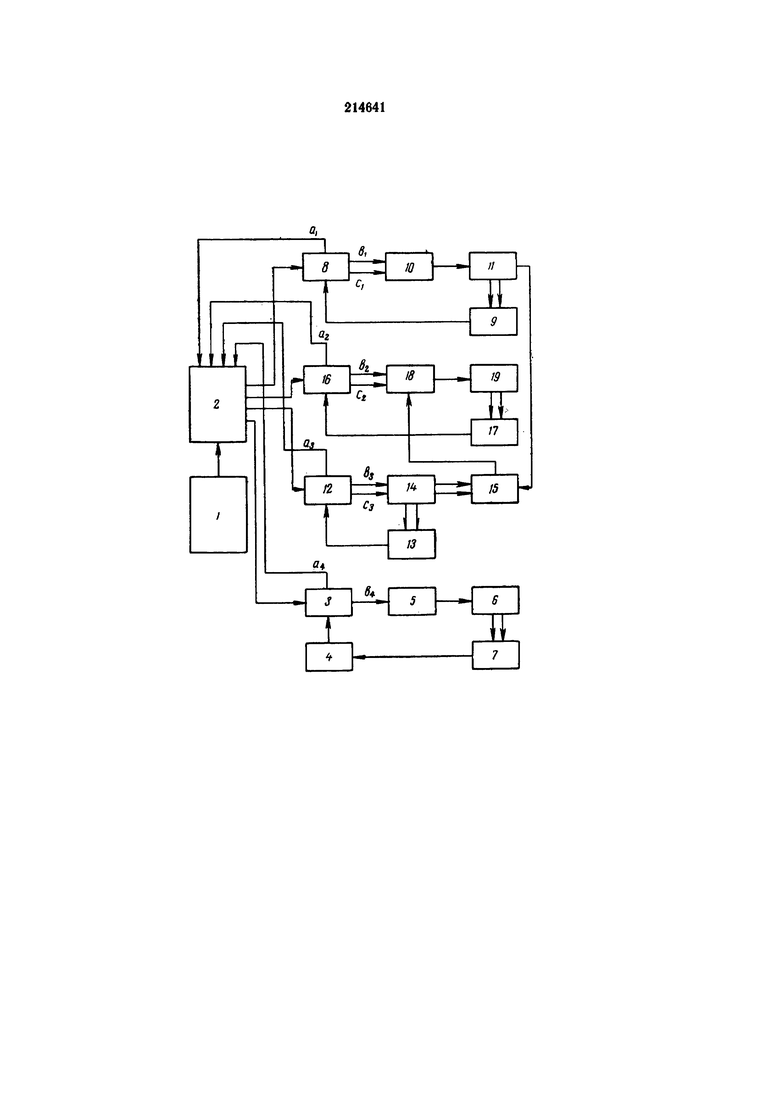
На чертеже представлена блок-схема устройства.
Схема содержит программоноситель 1 (перфоленту). Для задания кодов координат приводов и кодов соотношений скоростей принято двоичное кодирование. В программоноситель заносят следующие коды координат и команд:
команда работы по ископаемому;
команды начала и окончания работы по снятию стружки;
команда включения привода хода при переходе на новую стружку;
код координаты привода поворота;
код координаты привода подъема;
коды соотношений скоростей приводов для правого и левого поворотов;
код перемещения экскаватора для перехода к новой стружке.
В устройство управления 2 входят механизм реверсивной шаговой подачи ленты и блок реле. Механизм реверсивной шаговой подачи обеспечивает считывание информации и перемещение ленты в новое положение после отработки координат и команд данной позиции.
Блок реле включает соответствующие приводы по записанным на ленте командам и управляет механизмом реверсивной шаговой подачи ленты.
Схема совпадения 3 сравнивает требуемый код перемещения экскаватора при переходе к новой стружке с кодом действительного выдвижения. Схема имеет двухпозиционный релейный выход.
Устройство содержит также счетчик 4 единичных импульсов перемещения экскаватора, схему 5 управления приводом хода, привод 6 хода роторного экскаватора, датчик 7 единичных импульсов перемещения экскаватора, который преобразует перемещение экскаватора в серию импульсов, количество которых зависит от величины пройденного пути; устройство 8 сравнения координат привода поворота роторной стрелы, которое служит для сравнения заданной координаты привода, считанной из устройства 1 устройством 2, с координатой текущего положения. Устройство определяет знак рассогласования указанных величин и имеет трехпозиционный релейный выход; непрерывно-дискретный преобразователь 9 угла поворота привода поворота роторной стрелы, который преобразует угол поворота вала привода непосредственно в двоичный код; схему 10 управления приводом поворота роторной стрелы экскаватора, привод 11 поворота роторной стрелы, устройство 12 сравнения кодов соотношений скоростей приводов, непрерывно-дискретный преобразователь 13 следящей системы отработки соотношений скоростей приводов поворота и подъема роторной стрелы, сервопривод 14 для отработки требуемого соотношения скоростей, который управляется с выхода устройства 12 и при работе перемещает кодирующую маску устройства 13 до согласования соответствующего кода соотношения скоростей, считываемого устройством 2 из устройства 1, с кодом на устройстве 13; вычислительное устройство 15 для определения требуемой скорости подъема роторной стрелы. Его функции может выполнять потенциометр, на вход которого подается напряжение, пропорциональное текущей скорости поворота роторной стрелы, а движок разворачивается сервоприводом 14 на угол, пропорциональный требуемому соотношению скоростей приводов подъема и поворота. В результате производимого потенциометром умножения на выходе его устанавливается напряжение, пропорциональное требуемой скорости подъема роторной стрелы; устройство 16 сравнения координат привода подъема роторной стрелы, непрерывно-дискретный преобразователь 17. угла поворота привода подъема роторной стрелы, схему 18 управления приводом подъема и привод 19 подъема роторной стрелы.
Перед началом работы на уступе программоноситель 1 вводят в механизм реверсивной шаговой подачи ленты устройства управления 2 таким образом, что в зоне считывания находится первая начальная позиция программы. Приведя экскаватор вручную в соприкосновение с забоем на краю подступа (приблизительно в первой программируемой точке), включают программное управление.
По технологии работы роторного экскаватора с селективной выемкой полезного ископаемого первой операцией отработки слоя является выдвижение экскаватора вперед на толщину стружки. Первая позиция программы содержит код этого выдвижения, команду на включение привода хода и команду начала стружки, которая определяет направление последующих перемещений программоносителя 1.
Код выдвижения по команде включения привода хода считывается из устройства 1 устройством 2 и подается на вход схемы совпадения 3. Поскольку выдвижение экскаватора еще не началось, на второй вход схемы 3 от счетчика 4 подается нулевая кодовая комбинация.
Вследствие разности кодовых комбинаций на входах схемы на выходе в4 появляется сигнал, и схема 5 управления включает привод 6 хода. Экскаватор передвигается, и в процессе передвижения датчик 7 импульсов на приводе хода вырабатывает импульсы, количество которых пропорционально пройденному пути. Эти импульсы суммируются счетчиком 4. При совпадении кода, снимаемого с выхода счетчика 4, с запрограммированным в устройстве 1 кодом перемещения сигнал снимается с выхода в4 схемы совпадения 3, и привод 6 хода останавливается, так как экскаватор совершил предписанное программой выдвижение. Одновременно появляется сигнал на выходе а4 схемы совпадения 3. По этому сигналу, подаваемому на устройство управления 2, программоноситель 1 переводится на новую позицию. В этой позиции записаны коды координат приводов подъема и поворота стрелы экскаватора для первой точки стружки.
Код требуемой координаты привода поворота считывается из программоносителя 1 устройства 2 и подается на один из входов устройства сравнения координат привода поворота роторной стрелы, где сравнивается с кодом текущего положения стрелы, вырабатываемым непрерывно-дискретным преобразователем 9. При рассогласовании кодов на одном из выходов в1 или с1 (в зависимости от знака рассогласования) появляется сигнал, поступающий на схему 10 управления приводом поворота, которая включает привод 11 поворота роторной стрелы в направлении, необходимом для отработки рассогласования. Привод работает до прихода роторной стрелы в запрограммированную точку. При этом код требуемой координаты, записанный в устройстве 1, и код действительной, выработанный преобразователем, совпадут. При совпадении кодов сигналы в1 и c1 с выхода устройства сравнения 8 снимаются, и на выходе а1, появляется сигнал совпадения, подаваемый в устройство управления 2.
Один из двух записанных в программоноситель 1 кодов соотношений скоростей, соответствующий направлению поворота, выбирается в устройстве 2 с помощью находящейся в его памяти команды предыдущей позиции «начало работы по снятию стружки». Код считывается и подается в устройство сравнения 12. На второй вход устройства 12 поступает код с непрерывно-дискретного преобразователя 13, соответствующий текущему углу поворота сервопривода 14 и, следовательно, углу поворота движка потенциометра вычислительного устройства 15, так как устройства 13, 14 и 15 соединены жесткой механической связью. При несовпадении кодов на одном из выходов в3 или с3 (в зависимости от знака рассогласования) появляется сигнал, включающий сервопривод на движение в направлении, необходимом для отработки рассогласования. Привод перемещает потенциометр вычислительного устройства 15 и преобразователь 13 до совпадения кода на преобразователе с кодом соотношения скоростей, записанным в программоносителе 1.
При совпадении кодов сигнал с выхода в3 (или с3) устройства 12 снимается, сервопривод останавливается. На выходе a3 появляется сигнал, подаваемый в устройство управления 2.
Таким образом, движок потенциометра развернут на угол, соответствующий запрограммированному значению соотношения скоростей приводов подъема и поворота для данного участка, а на вход потенциометра подается напряжение, пропорциональное текущей скорости поворота роторной стрелы.
Напряжение на выходе потенциометра будет пропорционально скорости подъема роторной стрелы, необходимой для поддержания запрограммированного значения соотношения скоростей приводов и, следовательно, наклона траектории движения роторной стрелы.
Код требуемой координаты привода подъема считывается из программоносителя 1 устройством 2 и подается на один из входов устройства 16 сравнения координат привода подъема роторной стрелы, где сравнивается с кодом текущего положения стрелы, вырабатываемым непрерывно-дискретным преобразователем 17.
При рассогласовании кодов на одном из выходов в2 или с2 (в зависимости от знака рассогласования) появляется сигнал, поступающий на схему управления приводом подъема, которая включает привод 19 подъема роторной стрелы в направлении, необходимом для отработки рассогласования, со скоростью, рассчитанной в устройстве 15.
При совпадении кодов требуемой координаты в программоносителе 1 и действительной, выработанной преобразователем 17, сигнал в2 (или с2) с выхода устройства сравнения 16 снимается, и на выходе а2 появляется сигнал совпадения, подаваемый в устройство управления 2.
Одновременное наличие трех сигналов (а1, а2, a3) на входе в устройство управления 2 означает, что данная позиция программы выполнена.
После отработки последней точки стружки программируется выдвижение машины вперед на толщину очередной стружки (при работе вертикальными стружками). Снятие этой стружки может происходить по новой программе либо (при совпадении ее с предыдущей) путем отработки предшествующей программы в обратном направлении. Для работы в этом режиме в позиции с программой на выдвижение экскаватора пробивается команда «конец снятия стружки», по которой устройство 2 реверсируется и до появления команды «начало снятия стружки» будет перемещать программоноситель 1 в противоположном направлении.
После отработки слоя на достаточную величину машинист с помощью ручного управления отводит экскаватор и устанавливает ротор для начала отработки очередного слоя. Программа на отработку этого слоя в устройстве управления 2 устанавливается на считывание автоматически.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ЛЕНТОЧНЫМ | 1973 |
|
SU407050A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU326315A1 |
| Устройство для автоматического управления роторным экскаватором | 1971 |
|
SU487989A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Устройство программного управления роторной погрузочной машиной | 1984 |
|
SU1177419A1 |
| Устройство управления механизмом подачи рабочего органа роторного экскаватора | 1983 |
|
SU1093759A1 |
| Устройство дозированной подачи роторного экскаватора | 1987 |
|
SU1532662A1 |
| Устройство дозированной подачи поворота роторной стрелы экскаватора | 1977 |
|
SU747941A1 |
Устройство для автоматического управления роторным экскаватором с невыдвижной стрелой, содержащее привод угла поворота и привод подъема стрелы, соединенные с устройством управления, отличающееся тем, что, с целью обеспечения селективной выемки полезных ископаемых, в нем дополнительно установлены цифровой программоноситель, подключенный к устройству управления, и привод отработки соотношения скоростей приводов подъема и поворота роторной стрелы с устройством сравнения кодов соотношения скоростей приводов и жестко связанными между собой непрерывно-дискретным преобразователем, сервоприводом и устройством определения требуемой скорости подъема стрелы, причем устройство сравнения кодов подключено к устройству управления, а выход привода угла поворота - к устройству определения требуемой скорости подъема, выход которого подсоединен к схеме управления приводом подъема стрелы.
