Изобретение относится к автоматическому контролю и учету параметров работы экскаваторов-драглайнов, используемых на горных работах и при строительстве различных сооружений. 5 Устройство предназначено для автоматического измерения и контроля углов поворота платформы экскаватора при заполнении и разгрузке ковша.
Устройстгва для измерения и контро-Ю ля параметров работы экскаваторовдраглайнов , обеспечивающие измерение и контроль углов поворота пЯатформы в процессе экскавации, известны.--. 15
Известно устройство для контроля работы экскаватора, включающее узел контроля операции заполнения ковша, узел режима работы двигателя, узел контроля операции разгрузки ковша, 20 узел фиксации ковша в пространстве, счетчик числа циклов экскавации, узел измерения величины загрузки ковша с измерительным датчиком и счетчик суммарного угла поворота платформы экс- 25 каватора ИНаряду с контролем и измерением ряда параметров,характеризующих объем и содержание выполненных работ,устройство обеспечивает измерение угла 30
поворота платформы при переметении груженого ковша.из забоя в отвал.
Известно устройство, содержащее измеритель веса поднимаемого груза, блок измерения и учета суммарного угла поворота платформы, блок фиксации ковша в пространстве с датчиками, и реверсивными счетчиками длин тягового и подъемного канатов, подключенными через дешифраторы к логи-« ческому элементу И, которое обеспечивает в числе прочих функций также измерение и учет суммарного угла поворота платформы экскаватора 2.
Известно устройство, содержащее блоки измерения загрузки и разгрузки ковша, счетчик оборотов,, логический блок с элементами .И, ИЛИ, НЕ и блок измерения угла поворота платформы экскаватора, которое обеспечивает наряду с контролем и учетом основных параметров работы экскаватора измерение угла поворота платформы экскаватора при перемещении груженого ковша з .
Наиболее близким к предлагаемому по технической сущности является устройство для измерения и Контроля углов поворота платформы экскаваторадраглайна, которое, содержит датчи1 и положения, узлы определения направления вращения, логический, выводарезультата измерения, промежуточный, и выходной, связанные между собой определенным образом. Кроме укаэанйых узлов, устройство включает триггеры, реверсивный счетчик и логический элемент ИЛИ 4 . --.
.Устройство обеспечивает измерение и уЧЕёт углов поворота платфор№1 при перемещении груженого ковша : 1 ЙйсдЬМ цикле экскавации, вычисление и, фиксацйю Суммарного угла поворОТа по всем циклам экскавации, выполненных за определенное время. Однако при исользовании; эксКаваторов , наттрййёр, на вскрьошных работах по бестранспортной схеме для соблюдения паспорта ведения 1орных работ необходимо контролировать не угол между линией загрузки и разгрузки ковша, а углы разгрузки и загрузки, отсчитанные от какого-либо, принятого.за постоянное, направления. .
Такая необходимость во31Нийаёт в связи с тем, что в общем случае вели-, чина угла сектора загрузки Ковша не равна величине угла сектора разгрузки ковша, nbaTOMy измёрёние у17йа йё)Кду направлением загрузки-и разгрузки ковша .не выявляет нарушений паспорта экскавацйи, чтб сбпрЖёно с увели.чениём себестоимости горных работ. Всё рассмбтренные выше аналоги обеспечивают измерение именно у.гла между линией загрузки и линией разгрузки ковша, что существенно ограничивает.область их практического использования. . . -.
Цель изобретения - повышение производительности за счет ког тролирования УГЛОВЫХ параметров паспортов . забоя и отвала в проце;ссе экскавации.
Этодостигается тем, что устройство предлагаемой конструкции снабжено узлом коррекции и узлом фиксации угЛбв загрузки и разгрузки,, кото- . рый соединен с узлами определения направления вращения, вывода резуль- . татов измерения, выходным, логическим и узлом коррекции, подключенным к узлам логическому, вывода результатов измерения и определения направления вратДения.-
Узел коррекции. выполнен й четырех элементов И, логических элементов И и ИЛИ, двух ревероивных счетчиков, кнопки и время- задерживающего элгёмента; при этом входы управления режимами работы реверсивных с.четчйков соёдине.ны па-, раллельно, входы сброса реверсивных счётчиков соединены параллельно и подключены к кнопке, счетный вход Ъдного реверсивного счетчика соединен с выходом первого элемента И, вход; которого соединен параллельно .со счетным входом второго реверсив747943.
ного счетчика, прямые выходы первого счетчика связаны с одними входами первой и второй групп элементов И, а инверсные выходы его соединены с одними входами третьей и четвертой групп элементов И, вторае входы второй группы элементов И подключены к прямым выходам второго реверсивного счетчика, вторые входы четвертой группы элементов И подключенй°ки1 верснЕЛм выходам второго реверсивного счетчика, вторые входы первой.. и третьей групп элементов И через времязадерживающий элемент подключены к выходу второго элемента И, входы которого через элементы ИЛИ подключены к выходам второй и четвертой групп элементов И.
узел фиксации углов загрузки и разгрузки выполнен в виде двух триггеров, логических элементов И, ИЛИ и двух реверсивных счетчиков, при этом входы триггеров соединены пара ллельно, а выходы через первые элементы И подключены к входам первых элементов ИЛИ, вторые входы которых соединены .параллельно, а выходы свя.- заны со счетными входами соответствующих реверсивных счетчиков, вторые выходы триггеров подключены к входам вторых и третьих элементов И, другие входы которых соединенымежду собой параллельно, выходы вторых элементов И через вторые элементы ИЛИ подключены к одним управляющим входам реверсивных счетчиков, выходы третьих
элементов И через третьи элементы ИЛИ подключены к другим управляющим входам реверсивных счетчиков, при этом входы приведения в нулевое состояние реверсивных счетчиков и вторые входы вторых; элементов ИЛИ соединены параллельно.
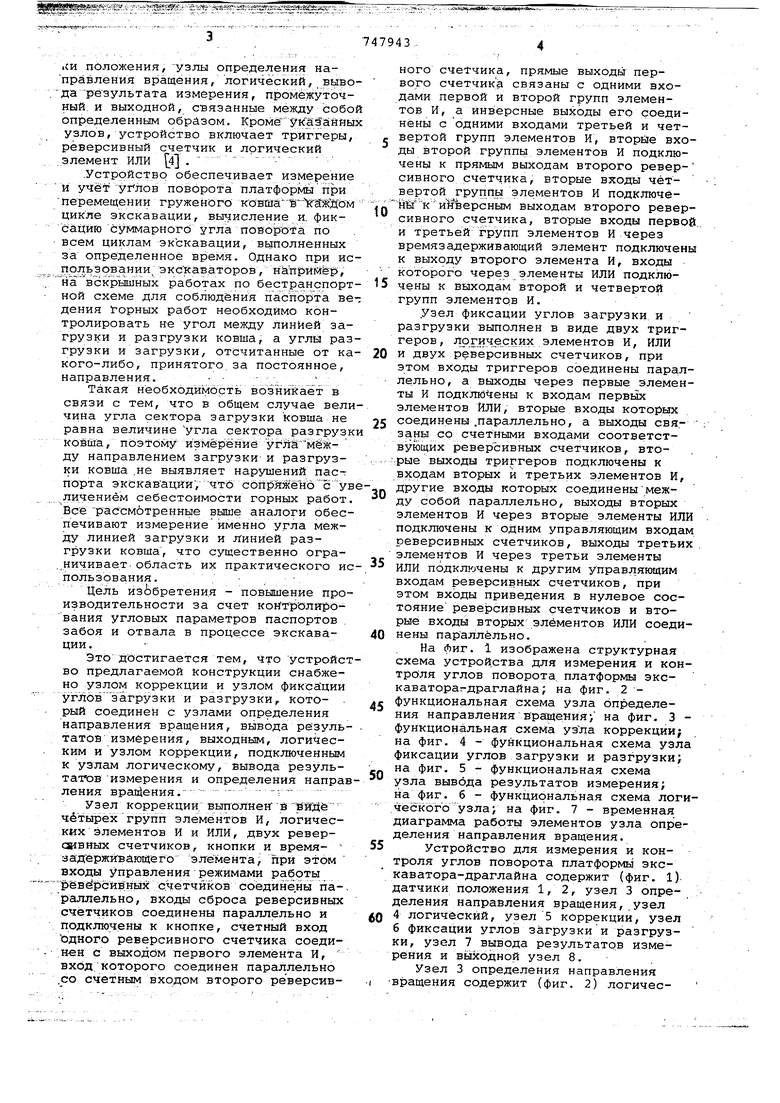
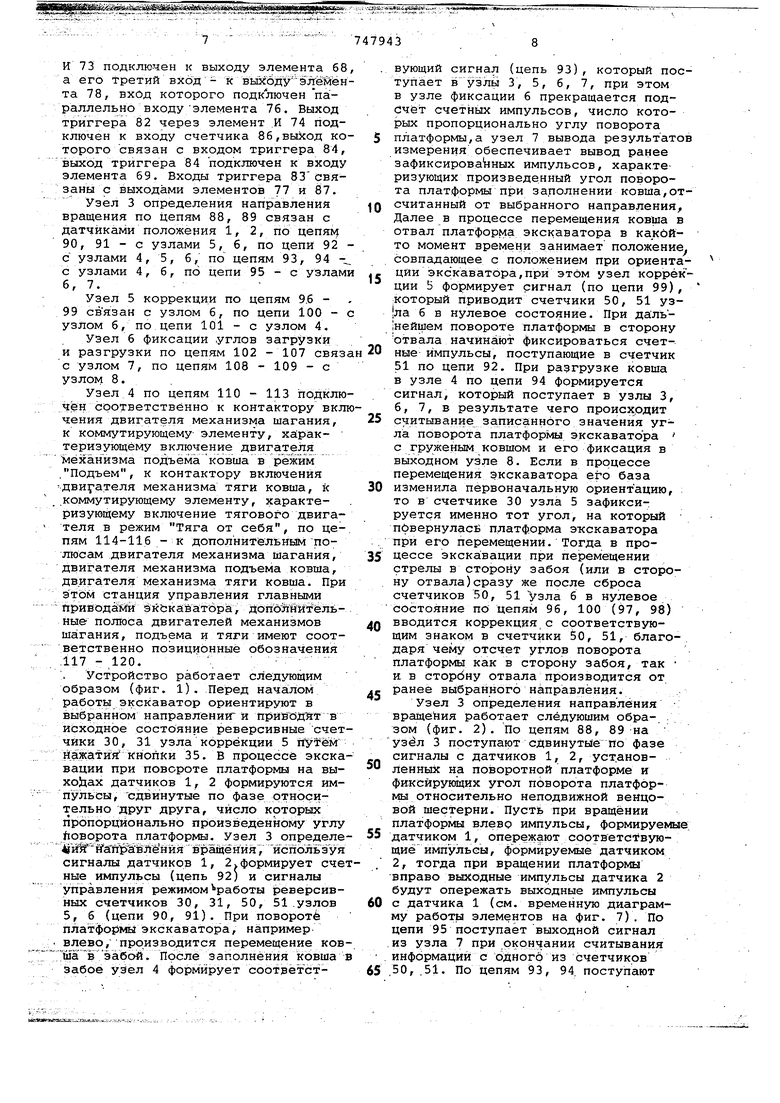
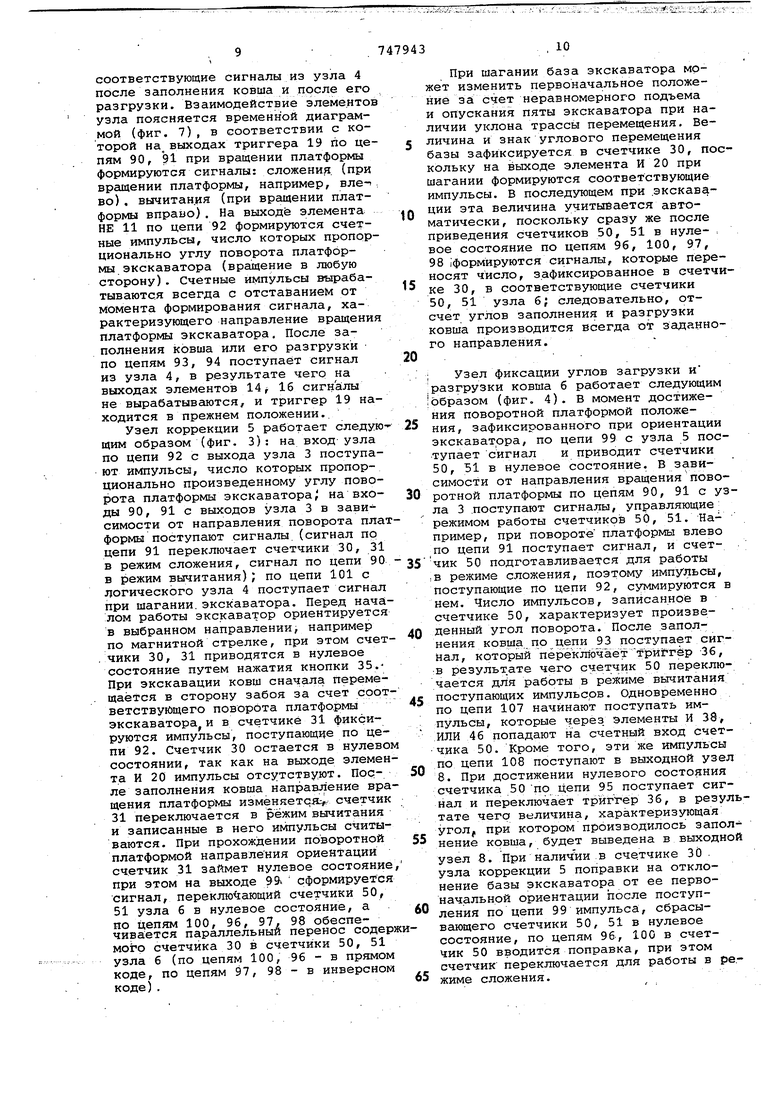
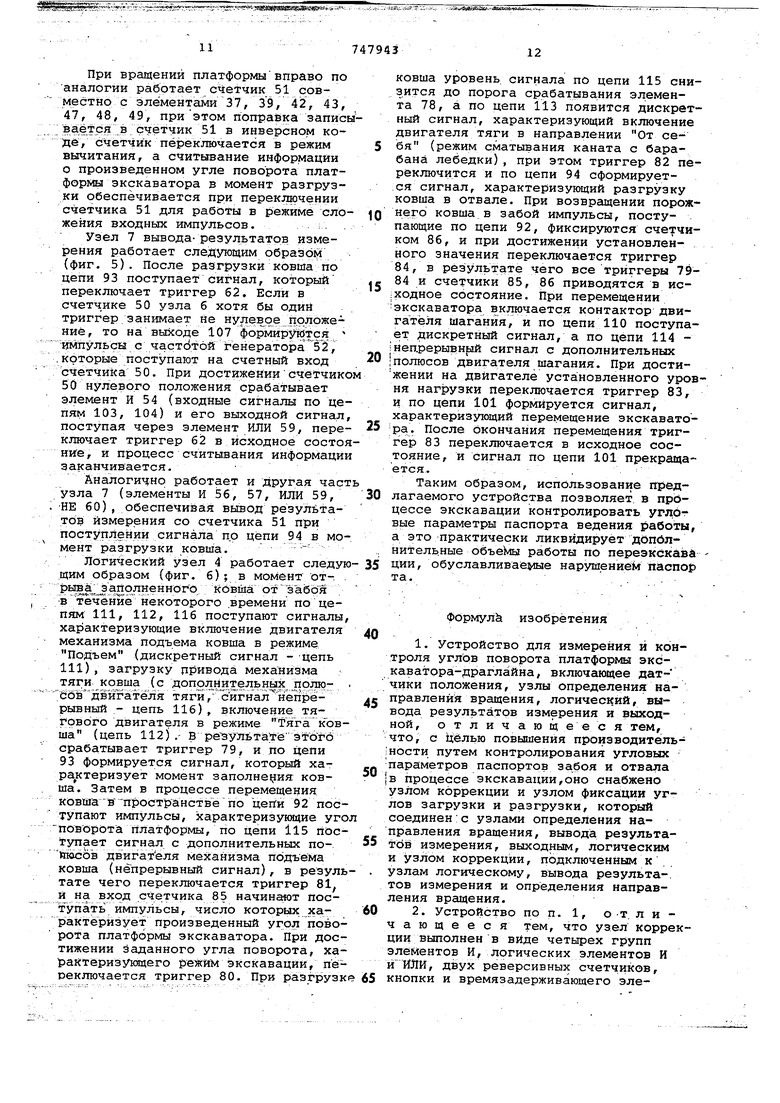
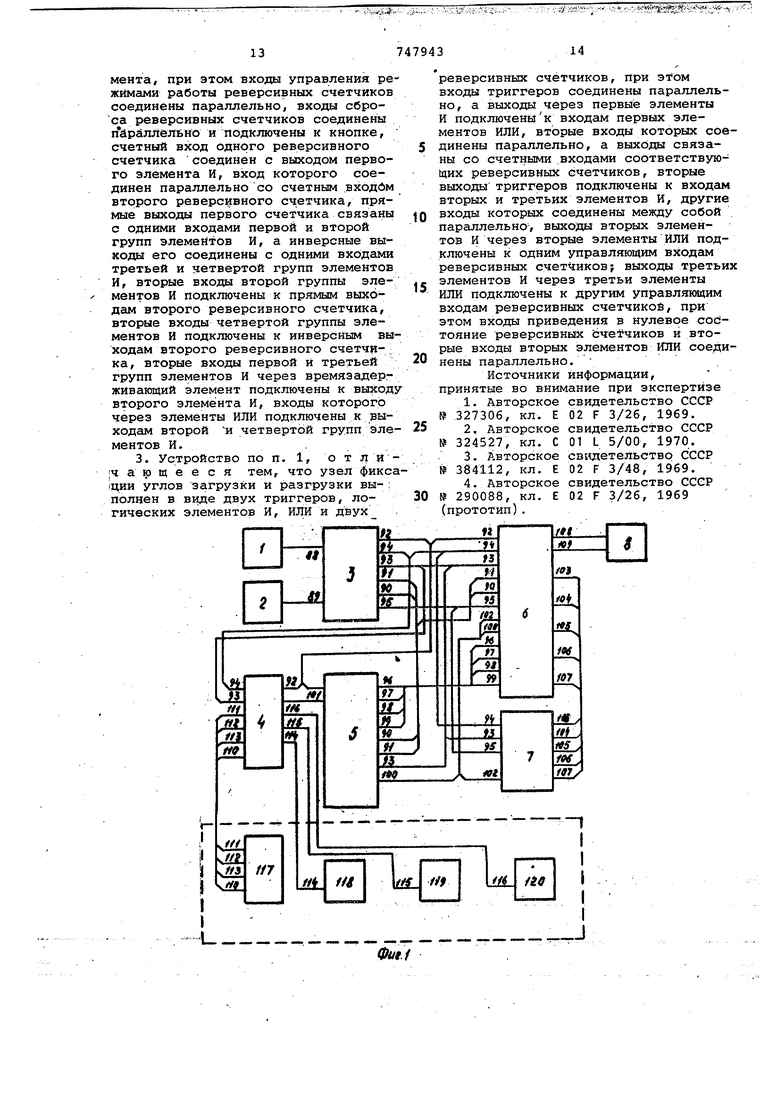
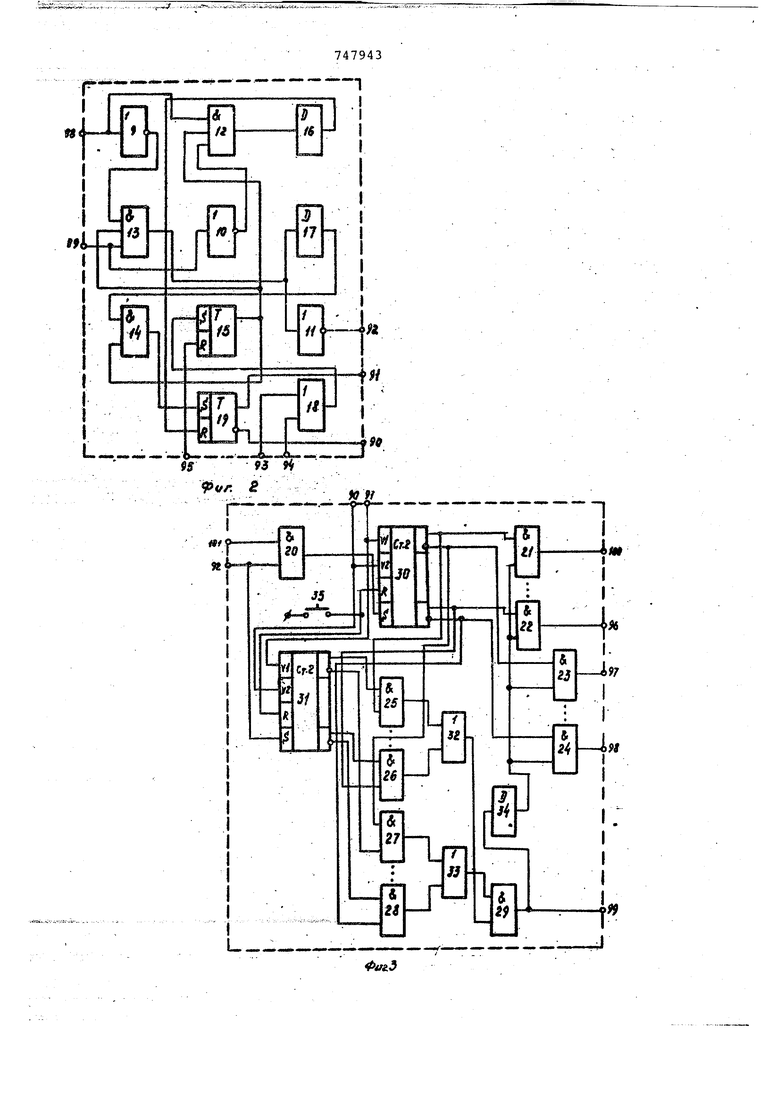
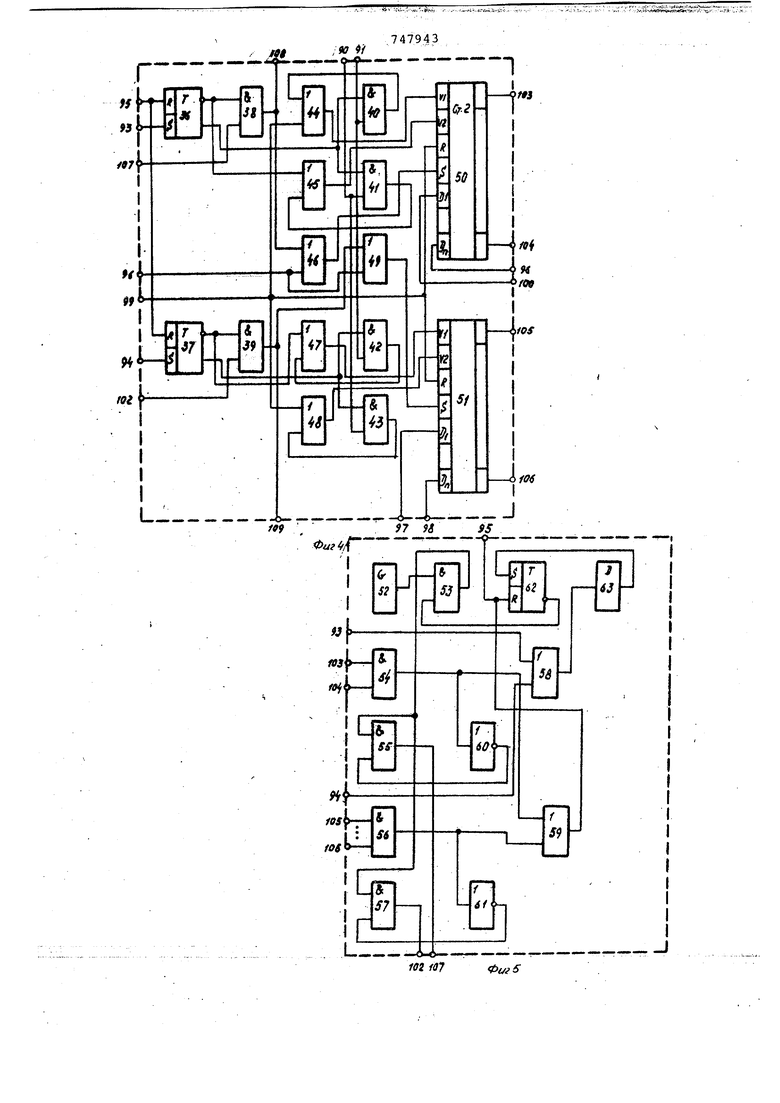
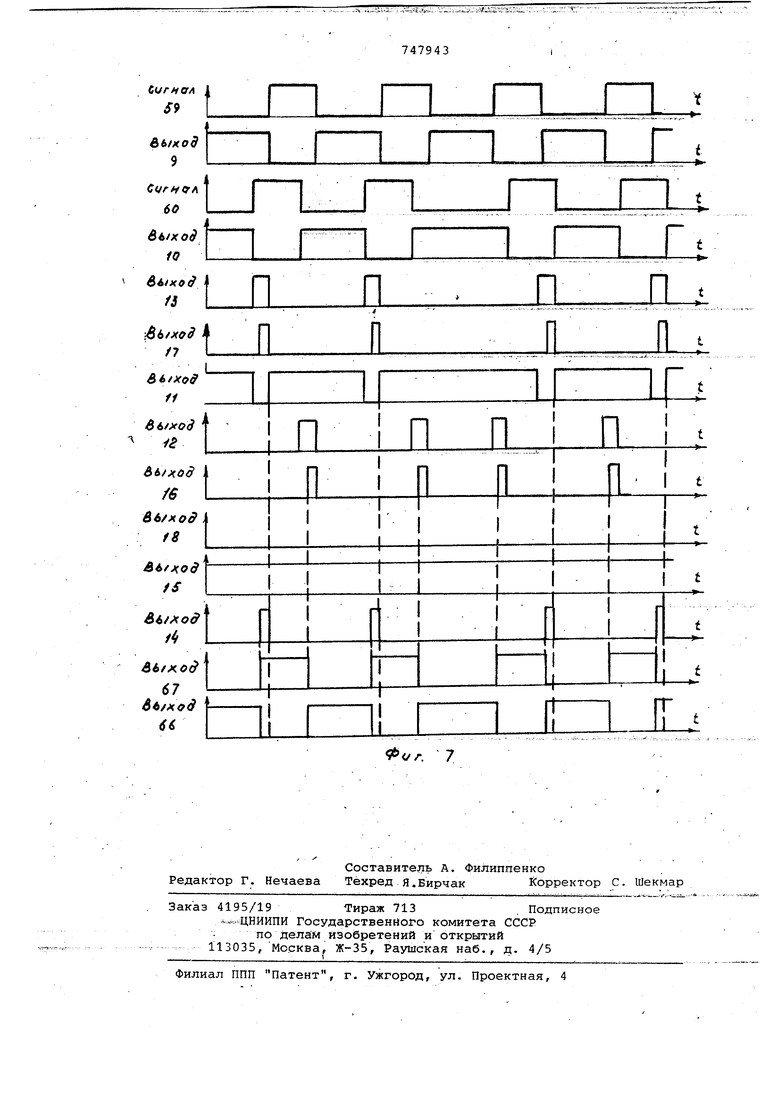
На фиг. 1 изображена структурная схема устройства для измерения и контроля углов поворота, платформы экскаватораг-драглайна; на фиг. 2 функциональная схема узла определения направления вращения) на фиг. 3 функциональная схема узла коррекции; на фиг. 4 - функциональная схема узла фиксации углов загрузки и разгрузки; на фиг. 5 - функциональная схема узла вывода результатов измерения; на фиг. б - функциональная схема логического узла; на фиг. 7 - временная диаграмма работы элементов узла определения направления вращения.
Устройство для измерения и контроля углов поворота платформ экскаватора-драглайна содержит (фиг. 1) датчики положения 1,2, узел 3 определения направления вращения,.узел 4 логический, узел 5 коррекции, узел б фиксации углов загрузки и разгрузки, узел 7 вывода результатов измерения и выходной узел 8.
Узел 3 определения направления
вращения содержит (фиг. 2) логические элементы НЕ 9-11, И 12-14, триг гер 15, времязадерживающие элементы 16, 17, элемент ИЛИ 18 и второй триггер 19. Входы элементов НЕ 9 « И 12 соединена параллельно,выход И связан с-входом элемента 16, выход которого подключен к входу триггера 19. Выход элемента НЕ 9 через элемент И 13 подключен к входам BpeNis задерживающего элемента. 17 и элемента НЕ 11. К выходу элемента 17 подключен соответствующий вход элемента И 14, другой вход которого св зан с выходом триггера 15. Второй вход элемента И 13 подключен к входу элемента НЕ 10, выход которого с динен со вторым входом элемента И Третий вход элемента И 12 подключен к соответствующему выходу триггера 15 и к входам элементов И 13, И 14. Вход триггера 15 соединён с выходом элемента ИЛИ 18. Соответствующие входы триггера 19 подключены к выходам элементов 16, 14. Узел 5 коррекции содержит (фиг. логические элементы И 20, 21,..., 22, 23,... 24,25,... 26, 27,... 28 29, реверсивные счетчики 30, 31, эл менты ИЛИ 32, 33, времязадерживающи элемент 34, кнопку 35. Установочные входы счетчиков 30, 3.1 связаны с кн кой 35. Входы управления режимом ра боты счетчиков 30, 31 соединены параллельно, счетный вход счетчика 30 подключен к выходу элемента И 20, а счетный вход счетчика 31 подключен к соответствующему входу элемента И 20. Прямые выходы триггеров счетчика 30 подключены к одним входам элементов И 21, ..., 22, другие вхо ды которых соедичены параллельно и подключены к выходу элемента 34. Ин версные выходы триггеров счетчика 3 подключены к одним входам элементов И 23f ... 24, другие входы которых соединены параллельно и подключены к выходу элемента 34. Одни входы элементов И 25, ... 26 подключены к прякплм выходс1М триггеров счетчика 31, а другие входы - к прямым вы ходам триггеров счетчика 30 соответствующих разрядов. Входы элемента ИЛИ 32 подключены к выходам элеме.нтов И 25, ... 26, а его выход связан с входом элемента ,. Одни входы элементов И. 27, ..., 28 соединены .с инверсными выходами счет-чика 30, другие - с инверсными выходами счетчика 31, выходы элементов И 27,..., 28 через элемент ИЛИ 33 подключены к соответствующему входу И 29, выход которого связан с.входом элемента 34. Узел 6 фиксации углов загрузки и разгрузки содержит (фиг. 4): триггеры 36, 37, элементы И 38-43, ИЛИ 44-49, реверсивные счетчики SCSI . Установочные входы триггеров 36, 37 соединены параллельно, один выход триггера 36 через элементы И 38f ИЛИ 46 подключен к счетному входу счетчика 50. Другой выход триггера 36 через последовательно соединенные элементы И 40, ИЛИ 44 и И 41, ИЛИ 45 связан с управляющими входами счетчика 50. Один выход триггера 37 через элементы и 39, ИЛИ 49 подключен к счетному входу счётчика 51. Другой выход триггера 37 через последовательно соединенные элементы И 42, ИЛИ 47 и И 43, ИЛИ 48 связан с управляющими входами счетчика 51. Установочные входы счетчиков 50, 51 и входы элементов ИЛИ 44, ИЛИ 48 соединены параллельно. Вторые входы элементов ИЛИ 45, 47 соединены с соответствующими инве|рснь1ми выходами триггеров 36, 37. Узел 7 вывода результатов измерения содержит (фиг. 5) генератор импульсов 52, логические элементы И 53-57, ИЛИ 58, 59, НЕ 60, 61, триггер 62 и времязадерживающий элемент 63; генератор 52 подключен к входу элемента И 53, выход которого связан с первыми входами элементов И 55, 57. Вторые входы элементов И 55, 57 через элементы НЕ 60, 61подключены к вых6дам элёмёН1 ов И 54, 56 и к соответствующим вхо-дам элемента ИЛИ 59. Входы триггера 62подключены к выходам элемента ИЛИ 59 и времязадерживающего элемента 63, вход которого связан с выходом элемента ИЛИ 58. Второй вход элемента И 53 подключен к выходу триггера 62. Логический узел 4 содержит (фиг.6) времязадерживающие элементы 64-69, элементы И 70 - 74, пороговые элементы 75 - 78, триггеры 79 - 84, счетчики .85, 86 и элемент НЕ 87. Входы элемента И 70 подключены к выходам элементов 64, 65, 67, вход элемента 67 подключен к выходу элемента 75, а выход элемента И 70 подключен к одному из входов триггера 79, другой вход которого подключен параллельно соответствующим входам триггеров 80 - 84, установочным входам счетчиков 85, 86 и выходу элемента 69. Второй вход триггера 81 через последовательно срединенные элементы И 72, элемент 66 подключен к выходу элемента 76, второй вход элемента И 72 подключен к выходу триггера 79. Выход триггера 81 через элемент И 71 связан со счетным входом счетчика 85, второй вход элемента И 71 подключен параллельно соответствующему входу элемента И 74, Выход счетчика 85 подключен к входу триггера 80, выход которого через элемент И 73 связан с входом триггера 82 , второй вход элемента И 73 подключен к выходу элемента 68 а его третий вход - к вых6ду элёйён та 78, вход которого подключен параллельно входуэлемента 76. Выход триггера 82 через элемент И 74 подключен к входу счетчика 8б,выход ко торого связан с входом триггера 84, выход триггера 84 подключен к входу элемента 69, Входы триггера 83связаны с выходами элементов 71 и 87. Узел 3 определения направления вращения по цепям 88, 89 связан с датчиками положения 1, 2, по цепям 90, 91 - с узлами 5, б, по цепи 92 с узлами 4,5, б, по цепям 93, 94 с узлами 4, б, по цепи 95 - с узлам Узел 5 коррекции по цепям 9.6 99 связан с узлом б, по цепи 100 узлом б, по цепи 101 - с узлом 4. Узел б фиксации углов загрузки и разгрузки по цепям 102 - 107 связ с узлом 7, по цепям 108 - 109 - с узлом 8. . Узел 4 по цепям 110 - 113 подклю чен соответственно к контактору вкл чения двигателя механизма шагания, к коммутирующему элементу, ха;рактеризующёму включение двигателя механизма подъёма ковша в режим .Подъем, к контактору включения Двигателя механизма тяги ковша, к коммутирующему элементу, характеризующему включение тягового двигателя в режим Тяга от себя, по цепям 114-116 - к дополнитёльньмполюсам двигателя механизма шагания, двигателя механизма подъема ковша, двигателя механизма тяги ковша. При этом станция управления главными гхрйшодай ёййкаватбра, допоЙгшй ёльные полюса двигателей механизмов шагания, подъема и тяги имеют соответственно позиционные обозначения ,117 - ,120. ;. Устройство работает следующим образом (фиг. 1). Перед работы экскаватор ориентируют в выбранном направления и 11рйВ бд11Т в исходное состояние реверсивные счет чики 30, 31 узла коррекции 5 ttyfeM йажатйя кнопки 35. В процессе экска вации при повороте платформы на выxoliax датчиков 1, 2 формируются импульсы, сдвинутые по фазе относительно друг друга, число которых пропорционально произведенному углу юворота платформы. Узел 3 определе ЙйГй ЖрШЙЙнйя Bif ieimk, йсполь сигналы датчиков 1, 2vформирует сче ные импульсы (цепь 92) и сигналы правления режимом работы реверсивных счетчиков 30, 31, 50, 51 .узлов 5, б (цепи 90, 91). При повороте платформа экскаватора, например. . влево, производится перемещение ков шав забой. После заполнения ковша забое узел 4 формирует соотретствующий сигнал (цепь 93), который поступает в узлы 3, 5, б, 7, при этом в узле фиксации б прекращается подСчет счетных импульсов, число которых пропорционально углу поворота платформы,а узел 7 вывода результатов измерения обеспечивает вывод ранее зафиксированных импульсов, характеризующих произведенный угол поворота платформы при заполнении ковша,отсчитанный от выбранного направления Далее в процессе перемещения ковша в отвал платформа экскаватора в какойто момент времени занимает положение, совпадающее с положением при ориентации экскаватора, при этом узел коррекции Б формирует сигнал (по цепи 99), который приводит счетчики 50, 51 б в нулевое состояние. При дальнейшем повороте платформы в сторону отвала начинают фиксироваться счетные импульсы, поступающие в счетчик 51 по цепи 92. При разгрузке ковша в узле 4 по цепи 94 формируется сигнал, который поступает в узлы 3, 6, 7, в результате чего происх.одйт считывание записанного значения угла поворота платформы экскаватора с груженым ковшом и его фиксация в выходном узде 8. Если в процессе перемещения экскаватора его база изменила первоначальную ориентацию, то в счетчике 30 узла 5 зафиксируется именно тот угол, на который пОвернуласЁ п.латформа экскаватора при его перемещении. Тогда в процессе экскавации при перемещении стрелы в сторону забоя (или в сторону отвала)сразу же после сброса счетчиков 50, 51 узла б в нулевое, состояние по цепям 96, 100 (97, 98) вводится коррекция с соответствующим знаком в счетчики 50, 51, благодаря чему отсчет углов поворота платформы как в сторону забоя, так и в сторбну отвала производится от ранее выбранного направления. Узел 3 определения направления вращения работ ает слёдуюшим образом (фиг. 2). По цепям 88, 89 на узел 3 поступают сдвинутые по фазе сигналы с датчиков 1, 2, уст.ановленных на поворотной платформе и фиксирующих угол поворота платформы относительно неподвижной веНцовой шестерни. Пусть при вращении платформы влево импульсы, формируемые, датчиком 1, опережают соответствующие импульсы, формируемые датчиком 2, тогда при вращении платформы вправо выходные импульсы датчика 2 будут опережать выходные импульсы с датчика 1 (см. временную диаграмму работы элементов на фиг. 7). По цепи 95 поступает выходной сигнал из узла 7 при окончании считывания информации с одного из счетчиков 50, .51. По цепям 93, 94. поступают

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля работы экскаватора-драглайна | 1976 |
|
SU643597A1 |
| УСТРОЙСТВО для КОНТРОЛЯ РАБОТЫ ЭКСКАВАТОРА | 1972 |
|
SU327306A1 |
| УСТРОЙСТВО для КОНТРОЛЯ и УЧЕТА СУЛ1МАРНОГО УГЛА ПОВОРОТА ПЛАТФОРМЫ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1971 |
|
SU290088A1 |
| Устройство для измерения работы экскаватора-драглайна | 1976 |
|
SU634232A1 |
| Устройство для определения положения экскавационной машины в пространстве | 1980 |
|
SU937622A1 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |
| Способ контроля и учета работы экскаватора-мехлопаты | 1987 |
|
SU1425277A1 |
| Устройство для измерения работы экскаватора драглайна | 1976 |
|
SU737575A2 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ВЕЛИЧИНЫ ЗАГРУЗКИ КОВША ЭКСКАВАТОРА | 1971 |
|
SU309098A1 |
| Способ контроля углов поворота платформы экскаватора-драглайна при выполнении вскрышных бестранспортных работ | 1983 |
|
SU1139803A1 |

jiv i-aftg JWi-4:: f- ..ч--j.y.... ,.,....- ..-. .
соответствующие сигналы из узла 4 после заполнения ковша и после его разгрузки. Взаимодействие элементов узла поясняется временной диаграммой (фиг. 7), в соответствии с которой на выходах триггера 19 по цепям 90, °91 при вращении платформы формируются сигналы: сложения, (при вращении платформы, например, вле-, во), вычитания (при вращении платформы вправо). На выходе элемента НЕ 11 по цепи 92 формируются счетные импульсы, число которых пропорционально углу поворота платформы экскаватора (вращение в любую сторону). Счетные импульсы вырабатываются всегда с отставанием от Момента формирования сигнала, характеризующего направление вращения платформы экскаватора, После заполнения ковша или его разгрузки по цепям 93, 94 поступает сигнал из узла 4, в результате чего на выходах элементов 14 16 сигналы не вырабатываются, и триггер 19 находится в прежнем положении..
Узел коррекции 5 работает следующим образом (фиг. 3): на вход узла по цепи 92 с выхода узла 3 поступают импульсы, число которых пропорционально произведенному углу поворота платформы экскаватора; на входы 90, 91 с выходов узла 3 в зависимости от направления поворота плаформы поступают сигналы.(сигнал по цепи 91 переключает счетчики 30, 31 в режим сложения, сигнал по цепи 90 в режим вычитания); по цепи 101 с логического узла 4 поступает сигнал при шагании.экскаватора. Перед нача:лом работы экскаватор ориентируется в выбранном направлении, например по магнитной стрелке, при этом счетчики 30, 31 приводятся в нулевое состояние путем нажатия кнопки 35.При экскавации ковш сначала перемещается в сторону забоя за счет соответствующего поворота платформы экскаватора и в счетчике 31 фиксируются импульсы, поступающие по цепи 92. Счетчик 30 остается в нулево состоянии, так как на выходе элемента И 20 импульсы отсутствуют. После заполнения ковша направление вращения платформы изменяется:, счетчик 31 переключается в режим вычитания и записанные в него импульсы считываются. При прохождении поворотной платформой направления ориентации счетчик 31 займет нулевое состояние при этом на выходе 99 сформируется сигнал, переключающий счетчики 50, 51 узла 6 в нулевое состояние, а
по цепям 100, 96, 97, 98 обеспечивается параллельный перенос содер
мого счетчика 30 в счетчики 50, 51 узла б (по цепям 100, 96 - в прямом коде, по цепям 97, 98 - в инверсном коде).
При шагании база экскаватора может изменить первоначальное положение за счет неравномерного подъема и опускания пяты экскаватора при наличии уклона трассы перемещения. Величина и знак углового перемещения базы зафиксируется в счетчике 30, пос кольку на выходе элемента И 20 при шагании формируются соответствующие импульсы. В последующем при .экскавации эта величина учитывается авто0матически, поскольку сразу же после приведения счетчиков 50, 51 в нуле- . вое состояние по цепям 96, 100, 97, 98 формируются сигналы, которые переносят число, зафиксированное в счетчи5ке 30, в соответствующие счетчики 50, 51 узла 6; следовательно, отсчет углов заполнения и разгрузки ковша производится всегда от заданного направления.
0
; Узел фиксации углов загрузки и разгрузки ковша 6 работает следующим Iобразом (фиг. 4). В момент достижения поворотной платформой положе5ния, зафиксированного при ориентации экскаватора, по цепи 99 с узла 5 поступает сигнал и приводит счетчики 50, 51 в нулевое состояние. В зависимости от направления вращенияпово0ротной платформы по цепям 90, 91 с узла 3 .поступают сигналы, управляющие режимом работы счетчикой 50, 51. Например, при повороте платформы влево по цепи 91 поступает сигнал, и счетчик 50 подготавливается для работы
5 ,в режиме сложения, поэтому импульсы, поступающие по цепи 92, суммируются в нем. Число импульсов, записанное в счетчике 50, характеризует произведенный угол поворота. После запол0нения ковша по .цепи 93 поступает сигНал, который переключает TpHfrep -36, :В результ.ате чего счетчик 50 переключается для работы в режиме вычитания поступающих импульсов. Одновременно
5 по цепи 107 начинают поступать импульсы, которые через; элементы И 38, ИЛИ 46 попадают на счетный вход счетчика 50. Кроме того, эти же импульсы по цепи 108 поступают в выходной узел
0 8. При достижении нулевого состояния счетчика 50 по цепи 95 поступает сигнал и переключает триггер 36, в результате чего величина, характеризующая угол, при котором производилось запол5нение ковша, будет выведена в выходной узел 8. ПРИ наличии в счетчике 30 узла коррекции 5 поправки на отклонение базы экскаватора от ее первоначальной ориентации после поступ0ления по цепи 99 импульса, сбрасывающего счетчики 50, 51 в нулевое состояние, по цепям 96, 100 в счетчик 50 вводится поправка, при этом счетчик переключается для работы в ре.5жиме сложения.
11
При вращений платформывправо по аналогии работает счетчик 51 совместно с элементами 37, 39, 412, 43, 47, 48, 49, при этом поправка записывается в счетчик 51 в инверсном коде, счетчик переключается в режим вычитания, а считывание информации о произведенном угле поворота платформы экскаватора в момент разгрузки обеспечивается при переключении счетчика 51 для работы в режиме сложения входных импульсов. :.
Узел 7 вывода-результатов измерения работает следующим образом (фиг. 5). После разгрузки ковша по цепи 93 поступает сигнал, который переключает триггер 62. Если в счетч,ике 50 узла б хотя бы один триггер/занимает не нулевое положение, то на выводе 107 формйруйтся
импульсы с частётой генератора 52, .которые поступают на счетный вход счетчика 50. При достижениисчётчиком 50 нулевого положения сраба:тывает элемент И 54 (входные сигналы по цепям 103, 104) и его выходной сигнал, поступая через элемент ИЛИ 59, переключает триггер 62 в исходное состояние, и процесс считывания информации заканчивается.
Аналогично работает и другая часть узла 7 (элементы И 56, 57, ИЛИ 59,
НЕ 60), обеспечивая вывод резулбтатов измерения со счетчика 51 при поступлении сигнала по цепи 94 в момент разгрузки ковша. : .Логический узел 4 работает следующим образом (фиг. 6) ; в момент от-. . |эьо ва; ; заполненногО,. . ковша отзабЬя в теченЙе некоторого времени по цепям 111, 112, 116 поступают сигналы, характеризующие включение двигателя механизма подъема ковша в режиме Подъем (дискретный сигнал - -цепь 111), загрузку привода механизма тяги ковша (с допол ительных псэлю- . ёов дёйгатёля тягй, сйгнал непрёрывный - цепь 116) , включение тягового двигателя в режиме ТяЪа кЪвша (цепь 112) ,- В результате этЪго срабатывает триггер 79, и по цепи 93 формируется сигнал, который хара ктеризует момент заполнения ковша. Затем в процессе перемещения ковша в Пространствепо цепи 92 поступают импульсы, характеризунидие угол поворота платформы, по цепи 115 поступает сигнал с дополнительных пойюсов двигателя механизма подъема ковша (непрерывный сигнал), в результате чего переключается триггер 81, и на вход счетчика 85 начинают поступать импульсы, число которых xaiрактёрйзует произведенный угол поворота платформы экскаватора. При достижении заданного угла поворота, ха актёризующего режим экскавации, переключается триггер 80. При разгрузке
747943
12
ковша уровень сигнала по цепи 115 снизится до порога срабатывания элемента 78, а по цепи 113 появится дискретный сигнал, характеризующий включение двигателя тяги в направлении От себя (режим сматывания каната с барабана лебедки), при этом триггер 82 переключится и по цепи 94 сформируется сигнал, характеризующий разгрузку ковша в отвале. При возвращении порожнего ковша в забой импульсы, посту- . пающие по цепи 92, фиксируются счетчиком 86, и при достижении установленного значения переключается триггер 84, в результате чего все триггеры 7984 и счетчики 85, 86 приводятся в ис|Ходное состояние. При перемещении :экскаватора включается контактор двигателя шагания, и по цепи 110 поступает дискретный сигнал, а по цепи 114 iнепрерывный сигнал с дополнительных полюсов двигателя шагания. При достижении на двигателе установленного уровня нагрузки переключается триггер 83, и по цепи 101 формируется сигнал, характеризующий перемещение экскавато|ра. После окончания перемещения триггер 83 переключается в исходное состояние, и сигнал по цепи 101 прекращается.
Таким образом, использование предлагаемого устройства позволяет, в прбцессе экскавации контролировать угловые параметры паспорта ведения работы, а это практически ликвидирует допйлнительные работы по переэкскава ции, обуславливаеьоле нарушением паспор та. ....
ФбрмулЬ изобретения
IB процессе экскавации,оно снабжено узлом коррекции и узлом фиксации углов загрузки и разгрузки, который соединен:с узлами определения направления вращения, вывода результатбв измерения, выходным, логическим и узлом коррекции, подключенным к . . узлам логическому, вывода результа-, тов измерения и определения направления вращения.
иИЛИ, двух реверсивных счетчиков, кнопки и времязадерживаюиего элемента, при этом входы управления режимами работы реверсивных счетчиков соединены параллельно, входы сброса реверсивных счетчиков соединены пйрйлЛёлбно и подключены к кнопке, счетный вход одного реверсивного счетчика соединен с выходом первого элемента И, вход которого соединен параллельно со счетным входим второго реверсивного счетчика, прямые выходы первого счетчика связаны с одними входами первой и второй групп элементов И, а инверсные выходы его соединены с одними входами третьей и четвертой групп элементов И, вторые входы второй группы элементов И подключены к прямым выходам второго реверсивного счетчика, вторые входы четвертой группы элементов И подключены к инверсным выходам второго реверсивного счетчика, вторые входы первой и третьей групп элементов И через времяэадерг живаюций элемент подключены к выходу второго элемента И, входы которого через элементы ИЛИ подключены к выходам второй и четвертой групп элементов И.
3, Устройство по п, 1, о т л и ;Ч а К) щ е е с я тем, что узел фикса|ции углов загрузки и разгрузки вы-; полнен в виде двух триггеров, логических элементов И, ИЛИ и двух
реверсивных счетчиков, при этом входы триггеров соединены параллельно , а выходы через первые элементы И подключенык входам первых элементов ИЛИ, вторые входы которых соединены параллельно, а выходы связаны со счетными входами соответствующих реверсивных счетчиков, вторые выходы триггеров подключены к входам вторых и третьих элементов И, другие входы которых соединены между собой
0 параллельно, выходы вторых элементов И через вторые элементы ИЛИ подключены к одним управляющим входам реверсивных счетчиков; выходы третьих элементов И через третьи элементы
5 ИЛИ подключены к другим управляющим входам реверсивных счетчикой, при этом входы приведения в нулевое состояние реверсивных Ьче чиков и вторые входы вторых элементов ИЛИ соеди0нены параллельно.
Источники информации, принятые во внимание при экспертизе
5
0 № 290088, кл. Е 02 F 3/26, 1969 (прототип).
.747943
юг 107
Фиг5
747943
vr. (
