1
Изобретение относится к горному делу и может быть использовано в системах управления роторных экскаваторов для диагностики состояния рабочего органа при копании.
Цель изобретения - повышение долговечности оборудования за счет контроля переменной составляющей нагрузки привода ротора
На фиг„1 представлена структурная схема устройства диагностики состояния рабочего органа роторного экскаватора; на фиг.2 - функциональная схема блока управляемый генераторов; ,на фиГоЗ - функциональная схема блока регулируемой задержки сигнала; на фиг.4 - функциональная схема интегратора; на фиг.5 - функциональная схем разделительного фильтра; на фиг.6 - функциональная схема логического блока; на фиг.7 - временные диаграммы работы трехстабильного порогового устройства с элементом НЕ на выходе и логического блока в зависимости от отношения интегральных значений момента к производительности.
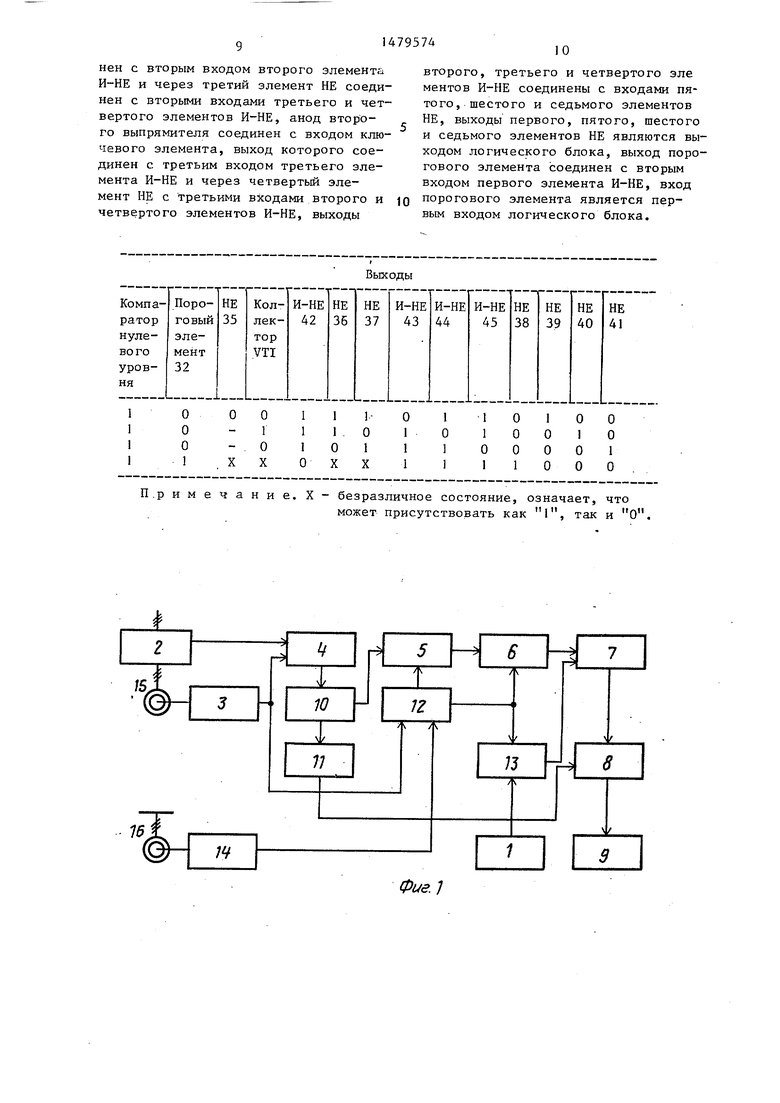
Устройство диагностики состояния рабочего органа роторного экскаватора содержит датчик 1 производитель ности, датчик 2 мощности, датчик 3 скорости привода ротора, делительный блок 4, блок 5 регулируемой задержки интегратор 6, делительньй блок 7, логический блок 8, блок 9 индикации, разделительный фильтр 10, усилитель 11, блок 12 управляемых генераторов, интегратор 13 и датчик 14 скорости конвейера рото-ной стрелЫо Позициями 15 и 16 обо1 чены двигатели роторного ковша конвейера роторной стрелы.
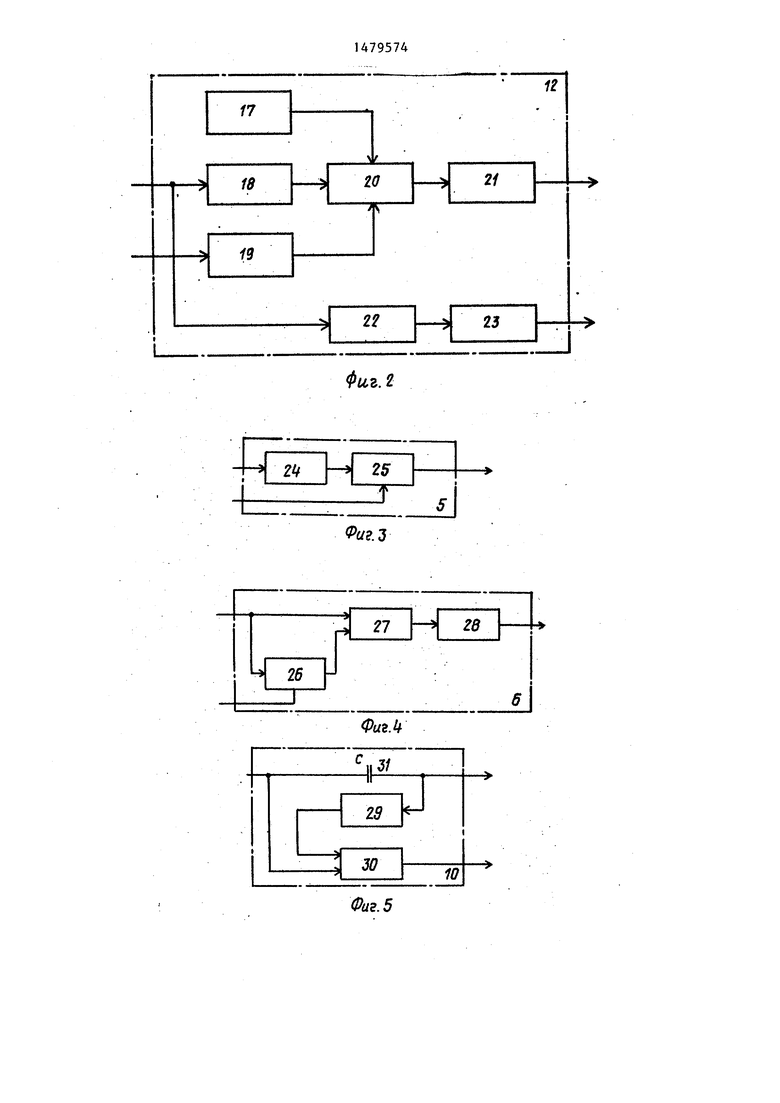
Блок управляемых генераторов содержит масштабные блоки 17-19, сумматор 20, преобразователь 21 напряжение - частота, масштабный блок 22, преобразователь 23 напряжение - частота.
Блок регулируемой задержки сигна
10
|5 20
25
795744
Блок 12 управляемых генераторов представляет собой генератор инфра- низкой частоты.
Масштабные коэффициенты блоков 17 - 19 соответственно пропорциональны времени разгрузки ковшей до конвейера роторной стрелы, времени подъема горной массы в ковшах ротора до разгрузки и времени перемещения горной массы по конвейеру роторной стрелы до места установки датчика производительности. Таким образом выходной сигнал сумматора 20 пропорционален времени запаздывания в канале измерения производительности о
Преобразователь 21 напряжение - частота преобразует аналоговый сигнал в последовательность импульсов инфранизкой частоты, пропорциональной времени запаздывания в канале производительности. Масштабный коэффициент блока 22 пропорционален времени полного оборота роторного колеса. Его выходной сигнал также посредством преобразователя 23 напряжение - частота преобразуется в частотный, характеризующий скорость ротора.
Блок 5 регулируемой задержки сигнала сдвигает сигнал нагрузки со скоростью, пропорциональной сумме скоростей вращения ротора, передвижения конвейера роторной стрелы и перемещения породы от места разгрузки до конвейера роторной стрелы, так как на второй вход сдвигового регистра 25 подается частотньй сигнал от блока 12 управляемых генераторов.
В интеграторе 6 на суммирующий:. вход реверсивного счетчика 27 и на первый вход сдвигового регистра 26 поступает сигнал нагрузки привода ро30
35
40
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Система автоматизированного управления роторным экскаватором | 1983 |
|
SU1164374A1 |
| Устройство для учета времени работы роторного экскаватора | 1981 |
|
SU987051A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
| Весодозировочное устройство для роторных экскаваторов | 1991 |
|
SU1816969A1 |
Изобретение относится к горному делу и может быть использовано в системах управления роторных экскаваторов для диагностики рабочего органа (РО) при копании. Цель изобретения- повышение долговечности оборудования за счет контроля переменной составляющей нагрузки привода ротора. Во время диагностики РО сигналы от датчика 2 мощности поступают на входы делительного блока (ДБ) 4, на второй вход которого поступает сигнал от датчика 3 скорости привода ротора. С выхода ДБ 4 сигнал, характеризующий значение момента двигателя 15 привода роторного ковша, через разделительный фильтр 10 и усилитель 11 поступает на вход логического блока (ЛБ) 8. Постоянная составляющая момента с второго выхода фильтра 10 поступает на вход блока 5 регулируемой задержки сигнала, на второй вход которого поступает сигнал с блока 12 управляемых генераторов, связанного с датчиками скорости привода ротора, и датчика 14 скорости конвейера роторной стрелы. Последний связан с двигателем 15 конвейера роторной стрелы. Блок 12 управляемых генераторов подключен также к двум интеграторам 6 и 13. На вход интегратора 6 поступают сигналы с блока 5 регулируемой задержки, а на вход индикатора 13 - сигналы с датчика 1 производительности. В ДБ 7 производится деление выходных сигналов интеграторов 6 и 13. Результирующий сигнал с ДБ 7 поступает на вход ЛБ 8. На второй вход ЛБ 8 поступает сигнал, пропорциональный амплитуде и частоте переменной составляющей, с выхода фильтра 10 через усилитель 11. В ЛБ 8 сигналы с ДБ 7 и усилителя 11 анализируются, и в блоке 9 индикации появляется сообщение о состоянии РО экскаватора и о прочностных свойствах экскавируемой породы. 1 з.п.ф-лы, 7 ил.,1 табл.
ла содержит аналого-цифровой преобра-45 тора, одновременно на второй вход
зователь 24 и сдвиговый регистр 25.
Интегратор содержит сдвиговый регистр 26, реверсивный счетчик 27 и цифроаналоговый преобразователь 28.
Раздельньй фильтр содержит инвертор 29, сумматор 30 и конденсатор 31 .
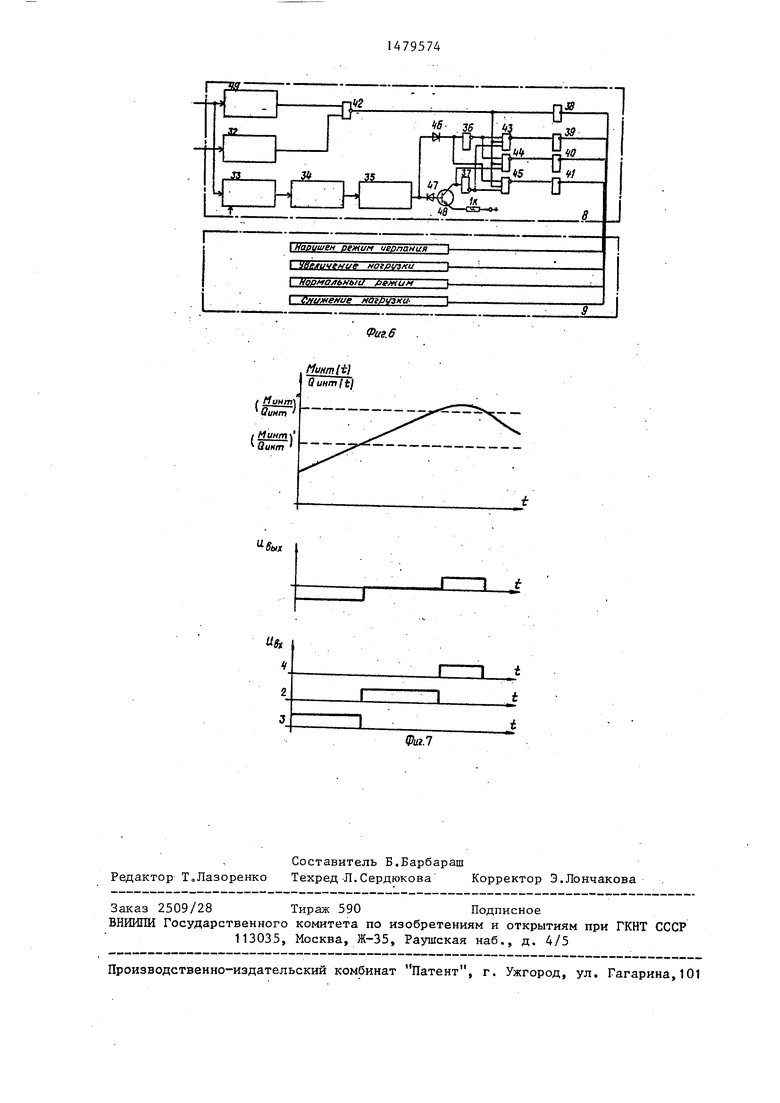
Логический блок содержит пороговый элемент 32, сумматор 33, трех- стабильное пороговое устройство 34, элементы НЕ 35 - 41, элементы И-НЕ ( 42-45, выпрямители 46 и 47, ключевой элемент 48 и компаратор 49 нулевого уровня.
50
55
сдвигового регистра 26 поступает ч стотный сигнал от блока 12 управля мых генераторов, в результате инфо мация в этом регистре сдвигается с скоростью, пропорциональной действ тельной скорости ротора. Таким обр зом, сигнал на выходе регистра 26 содержит информацию, задержанную н время, равное действительному приводу оборота ротора. Этот сигнал п ступает на вычитающий вход реверси ного счетчика 27 где производится вычисление разности входных величи этого счетчика и непрерывное опред
тора, одновременно на второй вход
сдвигового регистра 26 поступает частотный сигнал от блока 12 управляемых генераторов, в результате информация в этом регистре сдвигается со скоростью, пропорциональной действительной скорости ротора. Таким образом, сигнал на выходе регистра 26 содержит информацию, задержанную на время, равное действительному приводу оборота ротора. Этот сигнал поступает на вычитающий вход реверсивного счетчика 27 где производится вычисление разности входных величин этого счетчика и непрерывное опреде5
ление интеграла во времени от этой- разности, т.е. определение интегра-, ла от разности входной функции времени (в данном случае нагрузки привода ротора) и в этой же функции, запаздывающей по отношению к текущему моменту на время, равное действительному периоду оборота ротора. На выходе счетчика 27 образуется, таким образом, непрерывно изменяющийся во времени кодовый сигнал, соответствующий интегралу нагрузки на скользящем временном интервале, равном периоду оборота ротора. Этот сигнал преобразуется в- аналоговую величину цифроаналоговым преобразователем 28 и поступает на вход делительного блока 7. Интегратор 13 выполнен аналогичным образом.
Сигнал нагрузки привода ротора одновременно поступает на конденсатор 31 и на один вход сумматора 30, переменная составляющая сигнала с конденсатора 31 преобразуется в противофазный, одинаковый по абсолютному значению сигнал через инвертор 29 и поступает на другой вход сумматора 30.
Устройство работает следующим образом.
Сигналы от датчика 2 мощности поступают на первый вход делительного блока 4, на второй вход которого поступает сигнал от датчика 3 скорости привода ротора. С выхода делительного блока 4 значение момента двигателя 15 привода роторного ковша поступает на вход разделительного фильтра 10, Постоянная составляющая момента с второго выхода разделительного фильтра 10 поступает на первый вход блока 5 регулируемой задержки сигнала нагрузки, где сигнал M(t) задерживается на время 1 запаздывания в канале измерения производительности. Выходной сигнал блока задержки SM(t- C) поступает на первый вход интегратора 6, в то же время на первый вход интегратора 13 поступает сигнал -q(t) от датчика 1 производительности, т.е. выходные сигналы интеграторов 6 и 13 соответствуют одному масштабу времени Преобразование сигналов осуществляется в соответствии с выражениями: . для интегратора 6 t
MUHr(t- 1) -7г. j M(t-Odt , ip(-c; t-T.(t)
5746
для интегратора 13
1 QMHr(t) - q(t)dt ,
гг Р TP(t)
где Т р - период оборота ротора;
q(t) - величина текущего значения
производительности. В делительном блоке 7 выходной сигнал интегратора 6 делится на выходной сигнал интегратора 13. Выходной сигнал блока 7 соответствует в е-
(t;fjl
личине соотношения
WO
и поступает на первый вход логического блока 8.
Переменная составляющая момента ,с первого выхода разделительного
фильтра 10 подается на усилитель 11, формирующий сигнал с частотой и амплитудой, пропорциональной амплитуде и частоте переменной составляющей. Этот сигнал поступает на второй вход
логического блока 8. В логическом блоке 8 сигналы с блоков 7 и 11 анализируются и в блоке индикации появляется сообщение о состоянии рабочего органа экскаватора и о прочностных свойствах экскавируемой породы,
В работе логического блока 8 возможны четыре режима, на каждый из которых в блоке 9 индикации зажигается световое табло с надписью. Независимо от режима постоянно находятся в работе компаратор 49 нулевого уровня, у которого при наличии сигнала на входе на выходе присутствует сигнал 1, пороговый элемент 32, подающий единичный сигнал, если амплитуда переменной составляющей сигнала превысит максимальное значение, сумматор 33, трехстабильное пороговое устройство 34 и элемент НЕ 35, причем сигнал на выходе элемента НЕ 35 может принимать значения +Un; 0; -U „ (где II „ --напряжения 1) в зависимости от величины входного сигнала М инт )
Гннт(О
Для компаратора 49 нулевого уровня можно записать
5
хМинт v
(г.) 7 0, то U
и ит
Вь Х
4-9
- in.
,М ин
М инт .
(и) 0, то U
ИНГ
вМХ 49
ItnM
Для порогового элемента 32
м
7
то U
ВЫ 21
о. Ill и
М„п то U6blxj, О,
где М п- амплитудное значение переменной составляющей момента;
Работа логического блока поясняется таблицей состояний выходов элементов .
Появление 1 на выходе элемента
НЕ 38 означает п
II
нарушен режим черпания, на. выходе элемента НЕ 39 - . .-, it на ВЫХОде элеменнормальныи режим та НЕ 40 - снижение нагрузки выходе элемента НЕ 41 - нагрузки.
, на увеличение
Формула изобретения
14795748
М Пп - пороговое значение переменной составляющей момента.
5 Для трехстабильного порогового устройства 34 с инвертором на выходе
-U
п
датчика скорости привода ротора соединен с вторым входом первого делительного блока и первым входом блока управляемых генераторов, первый выход которого соединен с первым входом блока регулируемой задержки сигнала, выход датчика скорости конвейера роторной стрелы соединен с вторым входом блока управляемых генераторов, второй выход которого соединен с вторым входом первого интегратора и первым входом второго интегратора, выход разделительного фильтра соединен с вторым входом блока регулируемой задержки сигнала, выход датчика производительности соединен с вторым входом второго интегратора, выход второго делительного блока соединен с вторым входом логического блока.
последовательно соединенные трехстабильное пороговое устройство и вто- i рой элемент НЕ соединен с катодом первого выпрямителя и анодом второго выпрямителя, катод которого соединен с вторым входом второго элемента И-НЕ и через третий элемент НЕ соединен с вторыми входами третьего и четвертого элементов И-НЕ, анод второго выпрямителя соединен с входом ключевого элемента, выход которого соединен с третьим входом третьего элемента И-НЕ и через четвертый элемент НЕ с третьими входами второго и четвертого элементов И-НЕ, выходы
Примечание. Х- безразличное состояние, означает, что
может присутствовать как
1, так и
второго, третьего и четвертого эле ментов И-НЕ соединены с входами пятого, шестого и седьмого элементов НЕ, выходы первого, пятого, шестого и седьмого элементов НЕ являются выходом логического блока, выход порогового элемента соединен с вторым входом первого элемента И-НЕ, вход порогового элемента является первым входом логического блока.
Выходы
1, так и О.
Фие. 1
э
Ъ Ыф
S
Ј гпф
VЈS6Ј 7l
| Франко Р.Т | |||
| и др | |||
| Автоматизированная система управления процессом экскавации роторного комплекса высокой производительности | |||
| - Горный журнал, 1982, № 5, с о45-47 | |||
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
