(Л
С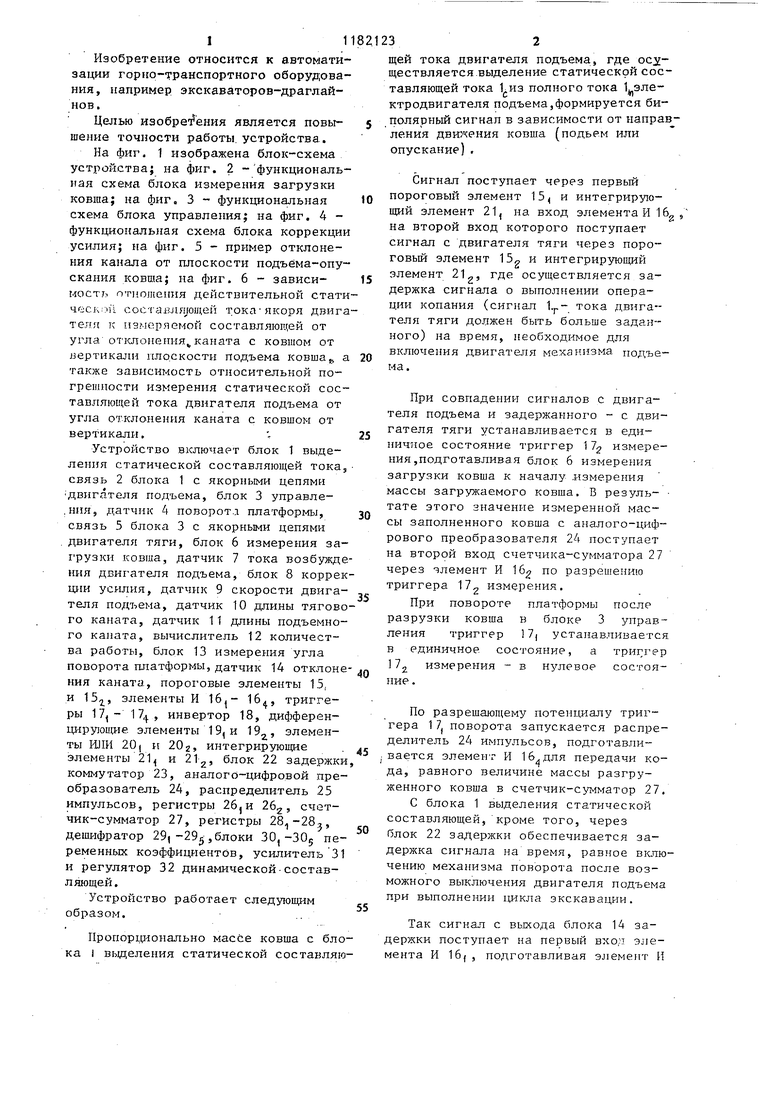


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Устройство для измерения работы экскаватора-драглайна | 1976 |
|
SU634232A1 |
| Устройство для взвешивания ковшадРАглАйНА | 1979 |
|
SU804775A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 1971 |
|
SU293940A1 |
| Способ определения веса ковша экскаватора-драглайна | 1976 |
|
SU662820A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1977 |
|
SU639999A2 |
| Способ автоматического учета основных показателей работы драглайна | 1983 |
|
SU1170058A1 |

УСТРОЙСТВО ЩЯ УЧЕТА РАБОТЫ ТРАНСПОРТНОГО ОБОРУДОВАНИЯ по авт.св. № 1059072, отличающееся тем, что, с целью повьпиения точности работы устройства, оно снабжено датчиком отклонения каната, подключен- ,ным к седьмому входу блока коррекции усилия.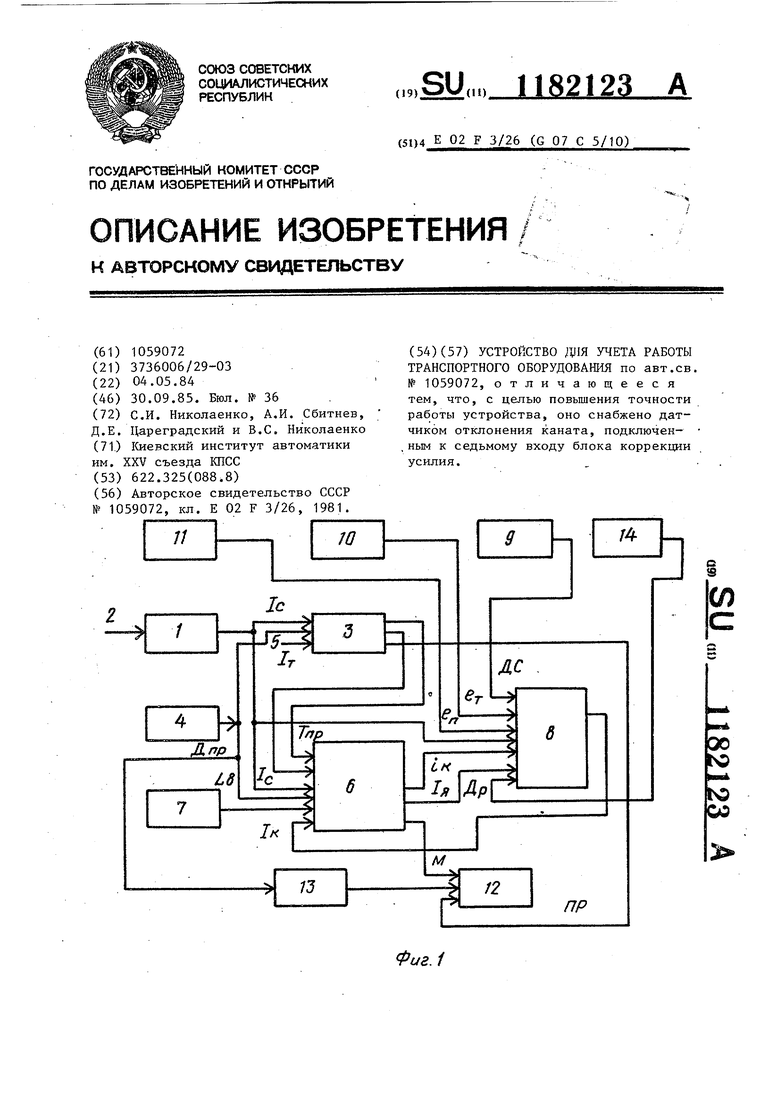
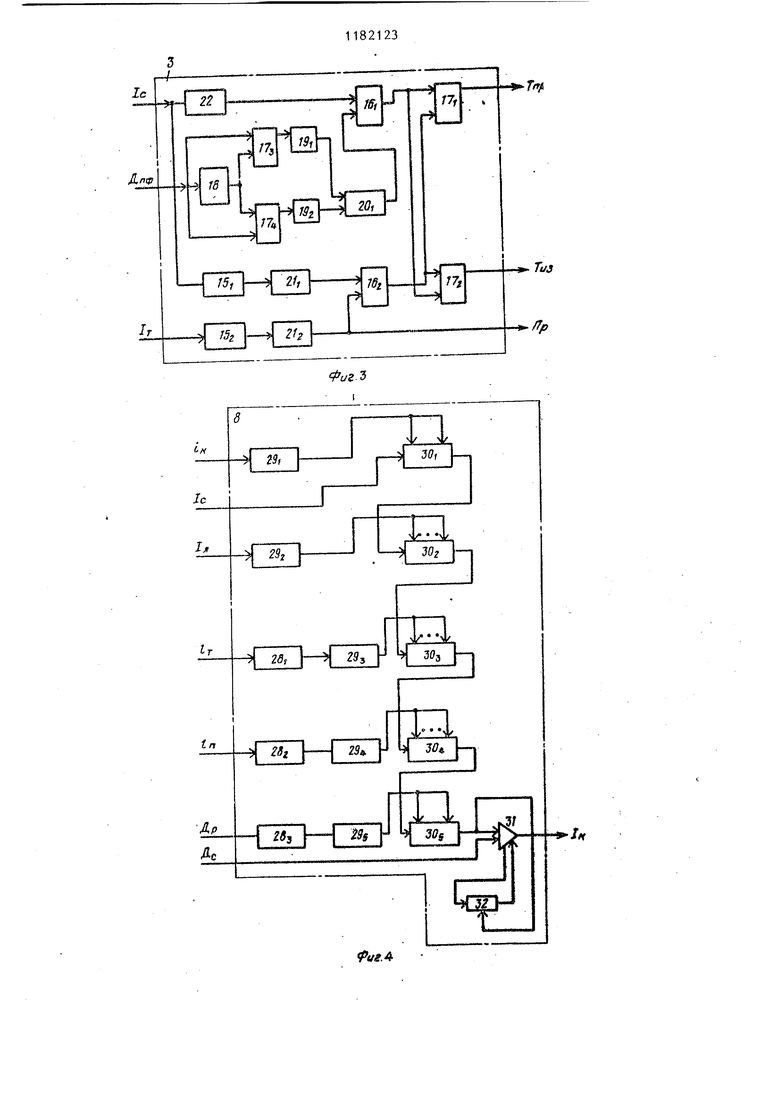
fas.f 11 Изобретение относится к автоматизации горно-транспортного оборудования, например экскаваторов-драглайнов . Целью изобрет ения является повышение точности работы, устройства. На фиг. 1 изображена блок-схема устройства; на фиг. 2 -функциональная схема блока измерения загрузки ковша; на фиг, 3 - функциональная схема блока управления; на фиг. 4 функциональная схема блока коррекции усилия; на фиг. 5 - пример отклонения канала от плоскости подъема-опускания ковша; на фиг. 6 - зависиместь отношения действительной стати составлушщей тока-якоря двига тели к измеряемой составляющей от угла огчшонения каната с ковшом от вертика;н1 плоскости подъема ковшаf, а также зависимость относительной погрешности измерения статической сос тавляющей тока двигателя подъема от угла отклонения каната с ковшом от вертикали.; Устройство блок 1 выделения статической составляющей тока связь 2 блока 1 с якорными цепями двигателя подъема, блок 3 управле.ния, датчик 4 поворота платформы, связь 5 блока 3 с якорными цепями двигателя тяги, блок 6 измерения за грузки ковша, датчик 7 тока возбужд ния двиг-ателя подъема, блок 8 корре ции усилия, датчик 9 скорости двига теля подьема, датчик 10 длины тягов го каната, датчик 11 длины подъемного каната, вычислитель 12 количества работы, блок 13 измерения угла поворота платформы, датчик 14 отклон ния каната, пороговые элементы 15, и 15, элементы И 16i- 16., триггеры 17,- 17,|. , инвертор 18, дифференщ-грующие элементы 19, и 19,, элементы Ш1И 20( и 20Z, интегрирующие элементы 21, и 21, блок 22 задержк коммутатор 23, аналого-цифровой пре образователь 24, распределитель 25 импульсов, регистры 26, и 262, счетчик-сумматор 27, регистры 28,-28.J, дешифратор 29,-29,блоки 30,-305 пе ременных коэффициентов, усилитель 3 и регулятор 32 динамической-составляющей. Устройство работает следующим образом. .. Пропорционально массе ковша с бл ка I выделения статической составля 32 щей тока двигателя подъема, где осуществляется выделение статической составляющей тока полного тока 1 электродвигателя подъема,формируется биполярный сигнал в зависимости от направ ления движения ковша (подьем или опускание), Сигнал поступает через первый пороговый элемент 15, и интегрируюшрий элемент 21, на вход элемента И 16 , на второй вход которого поступает сигнал с двигателя тяги через пороговый элемент 15g и интегрирующий элемент 212, осуществляется задержка сигнала о выполнении операции копания (сигнал 1.- тока двигателя тяги должен быть больше заданного) на время, необходимое для включения двигателя механизма подъема. При совпадении сигналов с двигателя подъема и задержанного - с двигателя тяги устанавливается в единичное состояние триггер 17 измерения ,подготавливая блок 6 измерения загрузки ковша к началу .1 змерения массы загружаемого ковша. В резуль- тате этого значение измеренной массы заполненного ковша с аналого-цифрового преобразователя 24 поступает на второй вход счетчика-сумматора 27 через -элемент И 16 по разрешению триггера 17 измерения. При повороте платформы после разрузки ковша в блоке 3 управления триггер 17) устанавливается в единичное состояние, а триггер 17 измерения - в нулевое состояние . По разрешающему потенциалу триггера 1 7| поворота запускается распределитель 24 импульсов, подготавли вается элемент И 16,для передачи кода, равного величине массы разгруженного ковша в счетчик-сумматор 27. С блока 1 выделения статической составляющей, кроме того, через блок 22 задержки обеспечивается задержка сигнала на время, равное включению механизма поворота после возможного выключения двигателя подъема при выполнении 1щкла экскавации. Так сигнал с выхода блока 14 задержки поступает на первый элемента И 1б(, подготавливая элемент И 311 16, для включения в единичное состоя ние триггера 17, поворота. Сигналом с датчика 4 поворота платформы в зависимости от направления движения плат формы экскаватора, поступающим через инвертор 18, устанавливается в единичное состояние триггер 17 поворота вправо или триггер 17 поворота влево, а сигнал с выхода триггеров 17 и 17 после дифференцирования своими дифференцирующими элементами 19, и 19 поступает через элемент И 16 на единичный вход триггера 17, поворота и нулевой вход триггера 172 . Разрешающим потенциалом, поступающим с единичного выхода триг гера 17 через элемент ИЛИ 20, запускается распределитель импульсов и вьщается разрешение на второй вход элемента И 16, разрешая подачу сигнала, равного массе разгруженного ковша, на вход реверсивного счетчика-сумматора 27 для определения массы передвинутого груза. Следовательно, триггер 17 устанав ливается в единичное состояние в слу чае изменения направления движения платформы экскаватора и если перед этим был сигнал о наличии усилия в подъемном канате (наличие нагрузки на двигателе механизма подъема). Блок 6 измерения величины загрузки ковша обеспечивает поочередное преобразование аналоговых сигналов тока возбуждения двигателя подъема, статической составляющей тока якоря двигателя подъема, скорректированной лишь по динамической составляющей, и статической составляющей тока якоря двигателя подъема, скорректированной по току возбуждения, по КПД двигателя, по длине подъемного и тяговых ка натов, по динамической составляющей с учетом скорости подъема или опуска ния ковша, а также дополнительно скорректированной по углу отклонения каната с ковшом от вертикали. Поочередное подключение параметров к аналого-цифровому преобразователю 2А осуществляется при помощи ;коммутатора 23, вькод которого подключен к входам регистра 26, тока возбуждения, регистра 26- якорного тока и к входам элементов И 164 Потенциал с триггера 17 поступает на второй вход элемента И 16, разрешая прием с аналого-цифрового прео бразователя 23 счетчиком-сумма34тором информации о величине якорного тока двигателя подъема при наличии тактового сигнала с распределителя 24 импульсов. Содержимое счетчика-сумматора передается в выходной блок 12 по сигналу с блока управления. Блок 8 коррекции усилия обеспе- чивает введение поправок в сигнал, cнимae ый с блока 1 выделения статической составляющей тока электродвигателя подъема, и пропорциональный массе ковша экскаватора. Сигнал с блока 1, проходя через блоки 30,-30, .переменных коэффициентов на вход усилителя 31, видоизменяется в зависимости от величины тока возбуждения,а от непосредственно текущего значения статической составляющей тока подъема, длины подъемного и тягового канатов, от режима работы механизма подъема (подъем или опускание ковша), а также от отклонения от вертикали каната с ковшом (плоскости подъема ко-вша) . Формирование коррекции по току возбуждения осуществляется цепочкой: датчик 7, регистр 26 , дешифратор 29/, блок 30I переменных коэффициентов, а выделенная блоком 1 статическая составляющая тока 1, биполярного вида поступает на вход матрицы сопротивлений блока 30 переменных коэффициентов. При одновременной подаче с регистра 26I на дешифратор 29, значения тока возбуждения в цифровом виде позиционньй код с дешифратора 29j подключает к матрице сопротивлений блока 30,переменных коэффициентов соответствующую цепь сопротивлений, в результате чего на выходе блока 30 скорректированный по току возбуждения 1J, KB . Коррекция по КПД двигателя подъема реализуется следующей цепью: регистр 26g, дешифратор блок 30 переменных коэффициентов. Эта функ-. ция реализуется по сигналу значения статической составляющей тока электродвигателя подъема в цифровом виде, снимаемому с регистра 26 и через дешифратор 292 зависимости от полярности аналогового сигнала ККв, поступающего с выхода блока 30, , включаются соответствующие цепи сопротивлений, осуществляя корректировку сигнала по КПД двигателя подъема. Для режима подъема сигнал. имеет вид 1дКв Кд,-а для режима опускания ковгаа вид I.KB Ко. Коррекция по длине тягового каната производится цепью, состоящей из датчиков 10 длины тягового каната, регистра 28, дешифратора 29j, блока 30т переменных коэффициентов. Коррекид я по длине подъемного каната выполняется по следующей цепи: датчик 11 длины подъемного каната, регистр 282, дешифратор 29ц, блок 30 переменных коэффициентов. Корректщя сигнала по отклонению подъемного каната с ковшом осуществляется следугащей цепочкой: датчик 14 отклонения каната, регистр 28, дешифратор 295-, блок 30 переменных коэффициентов. Для режима опускания сигнал имеет следующий вид: 1 Кв Ко Кт Кп Кр. Сигнап с пятого блока 305 перемен Н1)ТХ коэффициентов поступает на один ,кз входов усилителя, в качестве которого может быть, например, операцион Hbrfi устшителг-. типа 140УД7, и на вход резистора 32. Па второй вход усилите ля .поступает биполярный сигнал Дс с датчика 9 скорости подъема, с помощь которого осуществляется корректировк сигнала по изменению режима работы привода подъема.- -- Таким образом, на выходе усилителя появится аналоговый сигнал IK и 1к, пропорциональньй массе транспортируемого ковша соответственно для режима подъема ковша и для режима опускания. Аналоговые сигналы 1к, или IK с усилителя 31 через коммутатор 23 поступают на аналого-цифровой преобразователь 24, откуда после преобразования через инвертор 16 и 16 поступают на соответствующий вход счетчика-сумматора 27 (в зависимости от режима работы - подъем ковша с грузом или опускание разгруженного ковша.). В счетчике-сумматоре 27 осуществляется определение массы груза М , передвинутого ковшом. Данньш код М по изменению сигнала Пр, поступающего, с выхода второго интегрирующего элемента 212, переписывается в выходной блок 12, куда также через блок 13 измерения угла поворота платформы заносится значение угла поворота платформы, на которой перенесена масса вычислительного груза. Следовательно, выполнение в пред-, лагаемом устройстве коррекции по отклонению каната с транспортируемым ковшом от вертикали позволяет обеспечить -повышение точности определения массы транспортируемого материала в ковше.
Фиг 5
if/ f
в /в - i
/е I
| Устройство для учета работы транспортного оборудования | 1981 |
|
SU1059072A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
