(54) ИНТЕГ1ШРУЮЩЕЕ УСТРОЙСТВО

| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальный преобразователь перемещения в код | 1985 |
|
SU1275751A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU746655A1 |
| Цифровая следящая система | 1980 |
|
SU934446A1 |
| Позиционный привод с цифровым управлением | 1976 |
|
SU624205A1 |
| Частотно-импульсное устройство преобразования сигнала с мостового датчика | 1986 |
|
SU1383474A1 |
| Способ старт-стопного управления шаговым двигателем | 1986 |
|
SU1363417A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Устройство для позиционного управления шаговым двигателем | 1979 |
|
SU924816A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1334350A1 |
| УСТРОЙСТВО ДЛЯ СВАРКИ ДАВЛЕНИЕМ | 1989 |
|
SU1658510A1 |
1
Изобретение относится к области аналоговой вычислительной техники и может быть использовано в системах измерения запаса топлива на борту летательного аппарата.
Известно интегрирующее устройство 1, содержателе элементы сравнения, генератор ступенчатого напряжения, логические элементы и счетчик импуль-|0 сов. Однако это устройство имеет не- . высокую точность. , .
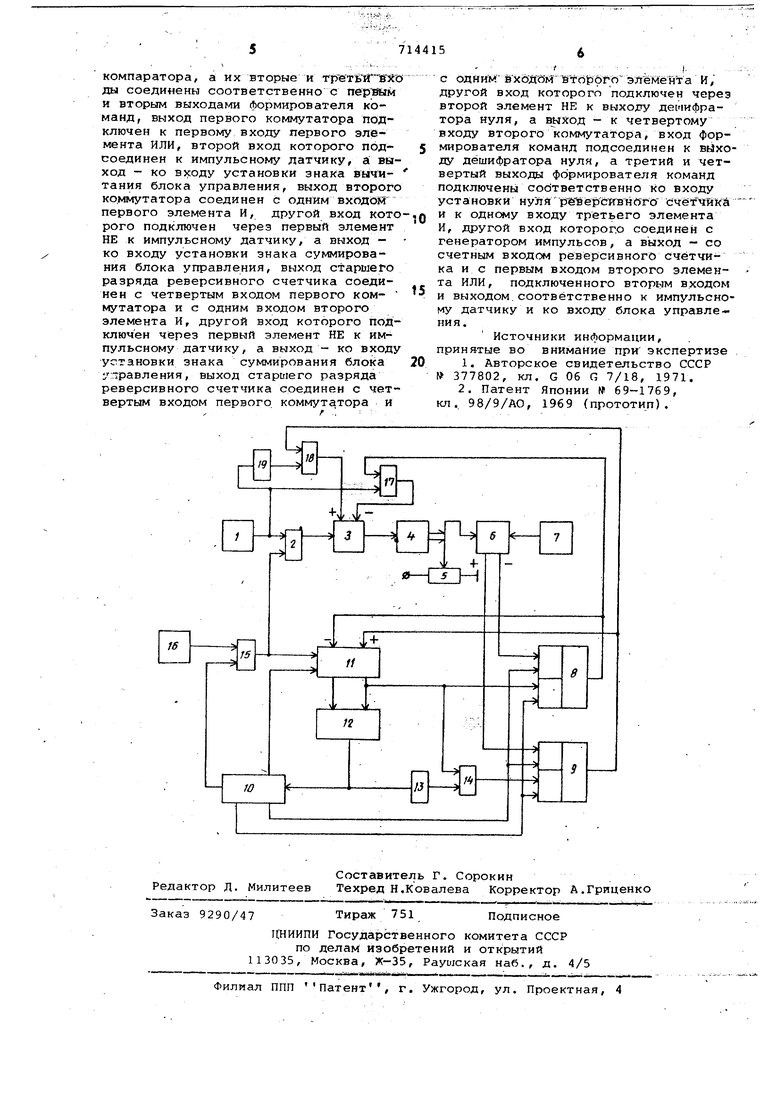
Наиболее близким техническим решением к данному изобретению является устройство 2, которое, как и дан- 15 ное устройство, содержит импульсный датчик, элементы И, ИЛИ, НЕ и компаратор, два входа которого подключены соответственна .к позиционному даУчЖку и электромеханическому датчийуЪб-20 ратной связи, кинематически соединённому входным валом с валом шагового двигателя, электрический вход которого соединен с выходом блока управления. Кроме того, это устройство со- 5 держит дополнительные позиционные датчики для контроля показаний интегрирующего устройства. Однако э.то устройство требует большого количества оборудования. 3d
Целью данного изобретения является упрощение устройства.
Это достигается тем, что устройство содержит два коммутатора, формирователь команд, реверсивный счетчик и дешифратор нуля, входы которого подключены к разрядным выходам реверсивного счетчика, подсоединенного входами установки знаков вычитания и суммирования к выходам соответственно первого и второго коммутаторов, первые входы коммутаторов подключены к соответствующим:выходам компаратора, а их вторые и Третьи входы соединены соответственно с первым и вторым выходами формирователя команд, выход первого коммутатора подключен к первому входу первого элемента ИЛИ, второй вход которого подсоединен к импульсному датчику, а выход - ко входу установки знака вычитания блока управления, выход второго коммутатора соединен с одним входом первого элемента и , другой вход которого подключен через первый элемент НЕ к импульсному датчику, а выход - ко входу установки знака суммирования блока управления, выход старшего разряда реверсивного счетчика соединен с четвертым входом первого коммутатора и с одним входом второго элемента И, другой вход которого подключен через вто рой элемент НЕ к выходу дешифратора нуля, а выход - к четвертому входу второго коммутат 51)97 вХод 61Гмир ователя команд подсоединен к выходу дешифратора нуля, а третий и четвертый выходы формирователя команд подключены соответственно ко входу установки нупя реверсивного счетчика и к одному входу третьего элемента И, другой вход которого соединен с генератором импульсов, а выход - со счетным входом реверсивного счетчика и с первым входом второго эл.емёнта ИЛИ, подключенного вторкм входом и выходом соот ветственно к импульсному датчику и ко входу блока управления. Блок-схема ин тёгрйруквдёго устройства приведена на чертеж;ё.-- Устройство содержит импульсный датчик 1, элемент 2,ИЛИ, блок 3 управления, шаговый двигатель 4, электромеханический датчик 5 обратной связи, компаратор б, позицибнный дат чик 7, коммутаторы 8 и 9, формирователь 10 команд, реверсивный счетчик 11, -дешифратор 12 нуля, элемент 13 НЕ, элементы 14 и 15 И,генератор 16 импульсов, элемент 17 ИЛИ, элемент 18 И и элемент 19 НЕ. Интегрирующее устройство работает следующим образом. Импульсы с импульсного датчика 1 поступают через элемент 2 ИЛИ на им пулЬсныЙ вхбд блока 3 управления и через элемент 17 ИЛИ на ВХЬд устанЬв кй знака вычитания блока 3 управле нйя. Шаговый двигатель 4 отрабатывает поступивший импульс таким образом что угол поворота его ротора будет пропорционален сумме входных импульсов, В режиме контр рля показаний интег рирующего устройства по показаниям позиционного датчика 7 формирователь 10 команд открывает элемент 15 И, и импульсы с генератораимпульсов 16 поступают через элемент 2 ИЛИ на им л Ёйнййвхрд блока 3 управления и на счетный вход реверсивного счетчика 11 . Направление враиейия шагового дви гателя 4 и направлениесчета рёве{5си нрго счетчика 11 определяется (в режиме .контроля) сигналом на выходе ШШЖрат6ра. б, прЬх:6дящим через первый; вход коммутатора 8 или 9, открытых по вторым входам сигналом с выхода формирователя 10 команд. Когда сйгйал на выходе датчика 5 обратной связи станет равным сигналу на выхо де позиционного датчика 7, тогда по углу поворота ротора шагового двига теля 4 оператор может проконтролиро вать работу интегрирующего устройст ва (т.е. определить величину измекения положения ротора. Код, записа ный в этот момент в реверсивном сче ике 11, соответствует раЭности поазаний интегрирующего и позиционноо измерителей. Старший разряд реверивного счетчика 11 выполняет функию знакового разряда (перед началом онтроля формирователь 10 команд усанавливает реверсивный счетчик 11 в улевое состояние). Определение знаа рассогласования позиционного и инегрирующего- измерителей происходит , с помощью элемента 14 И, элемента 13 НЕ ч дешифратора 12 нуля. После проведения операции контроля восстановление показаний интегрирующего измерителя происходит следующим образом. Формирователь 10 команд открывает элемент 15 И и по третьим входам коммутаторы 8 и 9. При этом направление вращения шагового дв йгателя 4 и направление счета реверсивного счётчика 11 будет противоположным знаку числа, записанного в реверсивном счетчике 11. Когда в реверсивном счетчике 11 установится нулевой код, на выходе дешифратора 12 нуля появится сигнал, который, посту-, пив в формирователь 10 команд закроет элемент 15 И и коммутаторы 8 и 9. При этом разница в показаниях позиционного и интегрирующего измерителей отработается шаговым двигателем 4. , Сохранение информации, поступающей с импульсного датчика 1 в процессе контроля, осуществляется с помощью элемента 19 НЕ и элемента 18 И, которые закрывают вход установки знака суммирования блока 3 управления- при появлении импульса на импульсного датчика 1. При этом, независимо от режима работы, каждый импульс, поступивший с выхода импульсного датчика 1, будет отработан шаговым двигателем 4. Формула изобретения Интегрирующее устройство, содержащее импульсный датчик, элементы И, ИЛИ, НЕ и компаратор, два входа которого подключены соответственно к пози ционному д;атчйку и электромеханическому датчику обратной связи, кинематически соединенному входным валом с валом шагового двигателя, электрический вхйд которого соединен с выходом блока управления, отличающееся тем,что, с целью упрощения устройства, в него введены два коммутатора, формирователь команд, реверсивный счетчик и дешифратор нуля, входа которого по/1;ключены к разрядным выходам реверсивного счетчика, подсоединенного входами установки знаков вычитания и суммирования к выходам соответственно первого и второго коммутаторов, первые входы KOMNiyTaTopoB подключены к соответствующим выходам компаратора, а их вторые и греть 1ГТЁ134Ъ ды соединены соответственно с перйым и вторым выходают формирователя команд, выход первого коммутатора подключен к первому входу первого эл емента ИЛИ, второй вход которого подсоединен к импульсному датчику, а выход - ко входу установки знака вычитания блока управления, выход второго ко.ммутатора соединен с одним входой первого элемента И, другой вход KOTO рого подключен через первый элемент НЕ к импульсному датчику, а выход ко входу установки знака суммирования блока управления, выход ctapDjefo разряда реверсивного счетчика соединен с четвертым входом первого коммутатора и с одним входом второго элемента И, другой вход которого подключен через первый элемент НЕ к импульсному датчику, а выход - ко входу установки знака суммирования блока 7: равления, выход старшего разряда реверсивного счетчика соединен с четвертым входом первого коммутатора и с ОДНИМ вхШой BTopbfrt эЛёМёнта И, другой вход которого подключен через второй элемент НЕ к выходу дешифратора нуля, а выход - к четвертому входу второго коммутатора, вход формирователя команд подсоединен к вйходу дешифратора нуля, а третий и четвертый выходы формирователя команд подключеньа соответственно ко входу установки Нуля рёТэерсйВ нОго счёгчйка и к одному входу третьего элемента И, другой вход которого соединен с генератором импульсов, а выход - со счетным входом реверсивного счётчика и с первым входом второго элемента ИЛИ, подключенного вторьш входом и выходом.соответственно к импульсноNiy датчику и ко входу блока управления. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 377802, кл. G Об G 7/18, 1971. 2. Патент Японии № 69-1769, кл.. 98/9/АО, 1969 (прототип).
