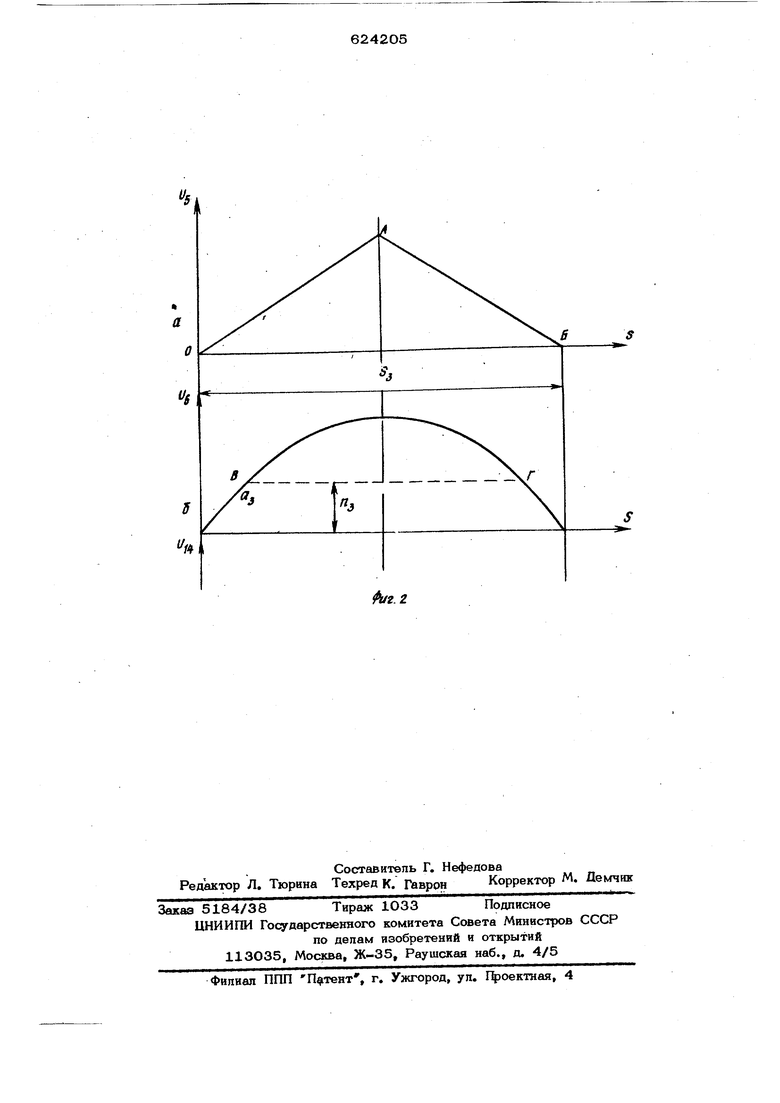
Изобретение относится к автоматизиро ванным системам управления металлорежущими станками. Известны устройства, содержащие датчики положения привода и его скорости, формирующие и переключающие блоки, которые имеют низкую точность. -Наиболее близким к изобретению по технической сущности является позиционный привод с цифровым управлением, который содержит последовательно соединенные формирователь сигнала управления, преобразователь код-аналог, реверсивный счетчик, один из выходов которого подключен к нуль-органу, соединенному с задатчиком величины перемещения, последовательно соединенны усилитель МОЩНОСТИ: и двигатель, импульс ный датчик, тахогенератор. Этот привод характеризуется сложностью и низкой точностью. Цепью изобретения является упрощение и повышение точности. В предложенном приводе это достигается тем, что он содержит блок умноженкя, коммутатор, блок логики, инвертор и ключи направления перемещения, причем импульсный датчик через блок умножения и последовательно соединенные с ним ключи подсоединен ко входам реверсивного счетчика, вход коммутатора соединен с выходом нуль-органа, один выход комк татора подключен к ключам, соединенным со входами реверсивного счетчика, а другой - со входом блока логики, второй вход которого связан с тахогенератором, а выход - с ключами направления перемещения, один из которых соединен с выходом формирователя сигнала управления и входом усилителя мощности, а другой - с выходом инвертора, вход которого связан с выходом формирователя сигнала управления и входом усилителя мощности. На фиг. 1 гфедставлена схема предложенного привода; на фиг. 2 - график, по ясняющий его работу. Он содержит задатчик 1 величины перемещения, нуль-орган 2, реверсивный счетчик 3, коммутатор 4, преобразователь 5 код-аналог, формирователь 6 сиг« нала управления с выходной характерноTHKoftUg V i блок 7 логики, ключи 8, 9,, 10 и 11, инвертор 12, блок 13 умножения, тахогенератор 14, усили-гель 15 мощности, двигатель (исполнительный 16 импульсный датчик 17 и механизм ,18 Формирователь 6, преобразователь 5 и реверсивный счетчик 3 соединены последовательно. Один из выходов счетчика подключен к нуль-органу 2, соединенному с задатчиком 1 величины перемещени Усилитель 15 мощности и двигатель 16 соединены также последовательно. Импул сный датчик 17 через блок 13умноже ния и последовательно соединенные с ним ключи 1О и 11 подсоединен ко входам реверсивного счетчика 3, вход ком мутатора 4. соединен с выходом иупьоргана 2, один выход KOMKiyTaTopa 4 со динен с кточами 10 и 11 на входах ре версивного счетчика 3. а другой со входом блока 7 логики, второй вход которого связан с тахогеператором 14, а выход - с ключами 8 и О, направления перемещения, один из которых соединен с выходом формирователя 6 сигнала уп- равления и входом усилителя 15 мощнос ти, а другой - с выходом инвертора 12, вход KOTOpoio связан с выходом формиро вателя 6 сигнала управления и входом усилителя 15 мощности,. -В исходном положении ключи 8, 9 и 10, 11 - разомкнуты, механизм 18 неподвижен. Для перемещения механизма 18изгочки О в точку ,Б (. 2,а) с помощью задатчика 1 устанавливается величина перемощения 5 , Производится установка счетчика 3 в О. Ключ 10 замыкается, счетчик 3 включается на режим суммирование. Устанавливаются требуемые скорости По- и ускорение 0(5. . При нажатии на лнопку Пуск вперед замыкается ключ 8 и механизм начинает перемещаться вперед со скоростью Пд . Умноженные в блоке 13 на 2 импульсы с датчика 17 поступают в счетчик 3. На выходе преобразователя S возрастает напряжение Uj , пропорционально удвоенному пройденному пути, как показано на фиг. 2,а. С -помощью формироваачэля 6 обеспечивается требуемая тахограмма приво да, например О а СО.П& , В точке А (см, фиГе 2, а) число в счетчике 3 совпадает с установленным задатчиком 1 и соответствующим заданному пути перемещения 6. ..Из нульч)ргана 2 поступает коман|да в коммутатор 4, который размьжает ключ 10 и замыкает ключ 11, Счетчий 3 из режима суммирование переводится в режим вычитание, напряжение Uj и соответственно напряжение Ug yMefitшается. В точке Г (см.. фиг. 2, б) напряжение tig становится меньще напряжения, соответствующего По, .Скорость двигателя сншкабт;ся, привод ахэрмозится и при нуле в счетчике 3 коммутатор 4 размыкает кшоч 11, подается команда на блок 7, который размыкает ключ 8, привод останавливается в точке Б. При этом ключ 10 замыкается, и привод готов к новому перемещению. При нажатии на кнопку Пуск назад (или команды реверс на осуществление цикла) привод начинает перемещаться на- .зад. Работа привода аналогична описанной с той лишь разницей( что замкнут ключ 9 и на вход усилителя мощности поступает инверсное напряжение Ug. Связь тахогенератора 14 с блоком 7 обеспечивает запрет на перемещение механизм 18 при ложной повторной команде -в.одном из его крайних положений. Например, при движении впередВ точке Б привод остановился. При повторной команде Пуск вперед 8 - разомкнут (ориентирование блока логики осуществляется в соответствии со знаком напря-, жения тахогенератора) и его замыкание, и соответственно повторное перемещение вперед возможно только после промел у- точного перемещения назад. Предложенный привод проще известных и обеспечивает , точность не менее 1 мм при перемещении до 5 м и не более 5 мм при перемещении до 25 м по сравнению с точностями порядка 20 мм (перемещение до 3 м) и 100.-150 мм (перемещение до 10 м) известных приводов. Формула изобретения Позиционный привод с цифровым управлением, содержащий последовательно соединенные формирователь сигнала управления, преобразователь код-аналог, реверсивный счетчик, один из выходов которого подключен к нуль-органу, сое- диненногугу с задатчиком. величины перемещения, последовательно соединенныеусилитель мощности и двигатель, импульсный датчик, тахогенератор, о т п ич а ю щ и и .с я тем, что, с цел1ло упрощения привода и повышения его точности, он содержит блок умножения, кшочи, коммутатор, блок логики и инвертор, причем импульсный датчик через, 5624 блок умножения и поспедоватепьно соеди4 ненные с ним ключи подсоединен ко входам реверсивного счетчика, вход ком.к татора соединен с выходом нуль-органа один выход коммутатора подключен к , соединенным со входами реверсивно гр счетчика, а другой - со входом блоке логики, второй вход которого связан с 5 гахогенератором, а выход - с ключами направления перемещения, один из которых соединен с выходом формирователя сигнала управления и входом усилителя мощности, а другой - с выходом инверто ра, вход которого связан с выходом формирователя сигнала; управления и входом усилителя мощности.

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Цифровая позиционная система | 1981 |
|
SU974341A1 |
| Реверсивный тиристорный электропри-ВОд C PEBEPCOM пОля | 1979 |
|
SU849400A1 |
| Реверсивный тиристорный электропривод переменного тока | 1970 |
|
SU505112A1 |
| Реверсивный тиристорный электропривод переменного тока | 1976 |
|
SU738087A1 |
| Устройство для защиты электропривода | 1979 |
|
SU864475A1 |
| Устройство для программного управления | 1977 |
|
SU734620A1 |
| Электропривод переменного тока | 1980 |
|
SU955482A1 |
| Нереверсивная электрическая машина с вентильно-механическим коммутатором | 1989 |
|
SU1791904A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
ф/чЖ
;1
Задание
Пуск Вперед наэа
