В современных металлорежущих станках-автоматах связь между управляющим механизмом л исполнительными механизмами (супортами) осуществляется при помощи механических звеньев рычагов, тяг, зубчатых за0,еплеиий и тому подобного, следствием чего является кинематическая и конструктивная сложиссть современных станков-автом атов.
В предлагаемом станке, с целью устранения указанного недостатка, для передачи рабочего движения от управляющего механизма к иснолнительному органу применены сильфонные приводы.
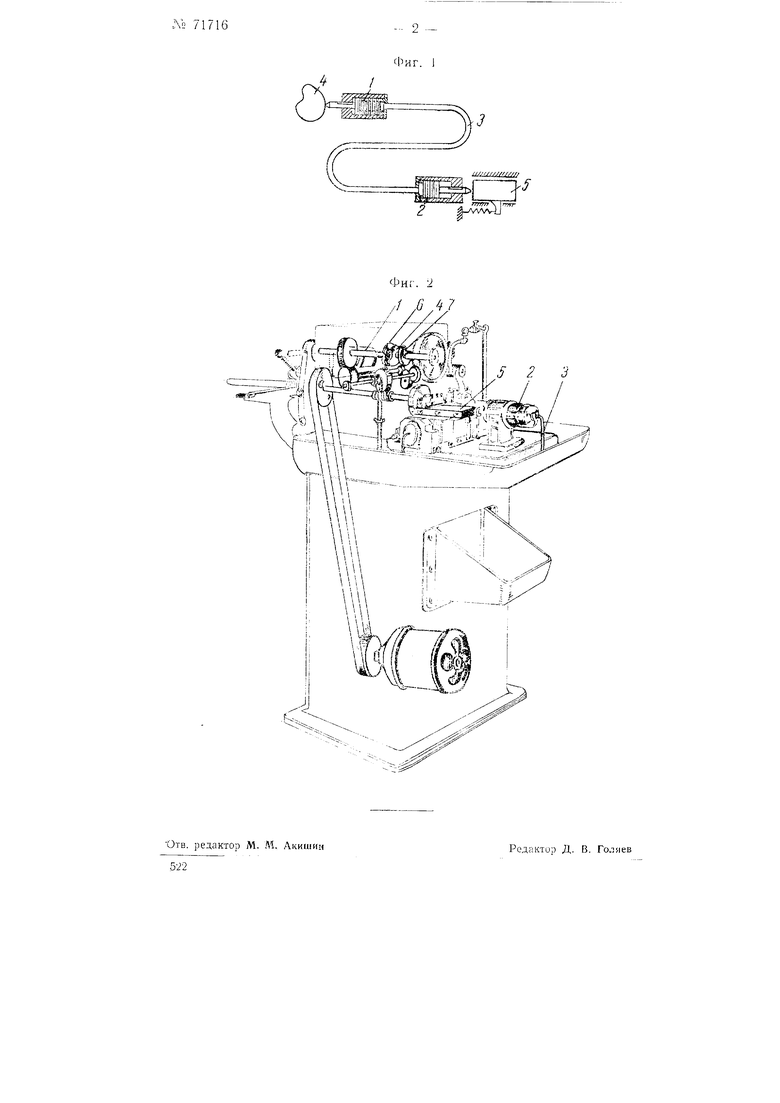
На фиг. 1 изображена принципиальная схема сильфонного привода для металлорежущего станка; на фиг. 2 пространственная схема стайка-автомата с сильфонным приводом.
Сильфонный привод представляет собой герметическую систему, состоящую из двух эластичных гофрированных коробок (сильфонов) 1 и 2, соединенных трубопроводом 3, и заполненную маслом.
Кулачок 4 управляющего механизма, построенный соответственно
циклу работы инструмента при обработке данного изделия, действует на толкатель первого сильфона /, в результате чего сильфон сжимается и, передавая давление через жидкую среду, заставляет разжиматься второй сильфон 2, воздействующий на резцовый супорт 5.
Вследствие герметического занолнения системы сильфонов практически несжимаемой жидкой средой инструмент при движении целиком копирует закон перемещения толкателя кзлачка.
Обратное движение супорта осуществляется под действием пружины.
Наличие второй системы сильфоиов, управляемых другими кулачками 6 и 7, обеспечивает перемещение инструмента в двух перпендикулярных направлениях, т. е. его поперечную и продольную подачу.
Предмет изобретения
Металлорежущий станок, о т л ичающийся нрименением для передачи рабочего движения от управляющего механизма к исполнительному органу сильфонных приводов.
тт
й-vwwJ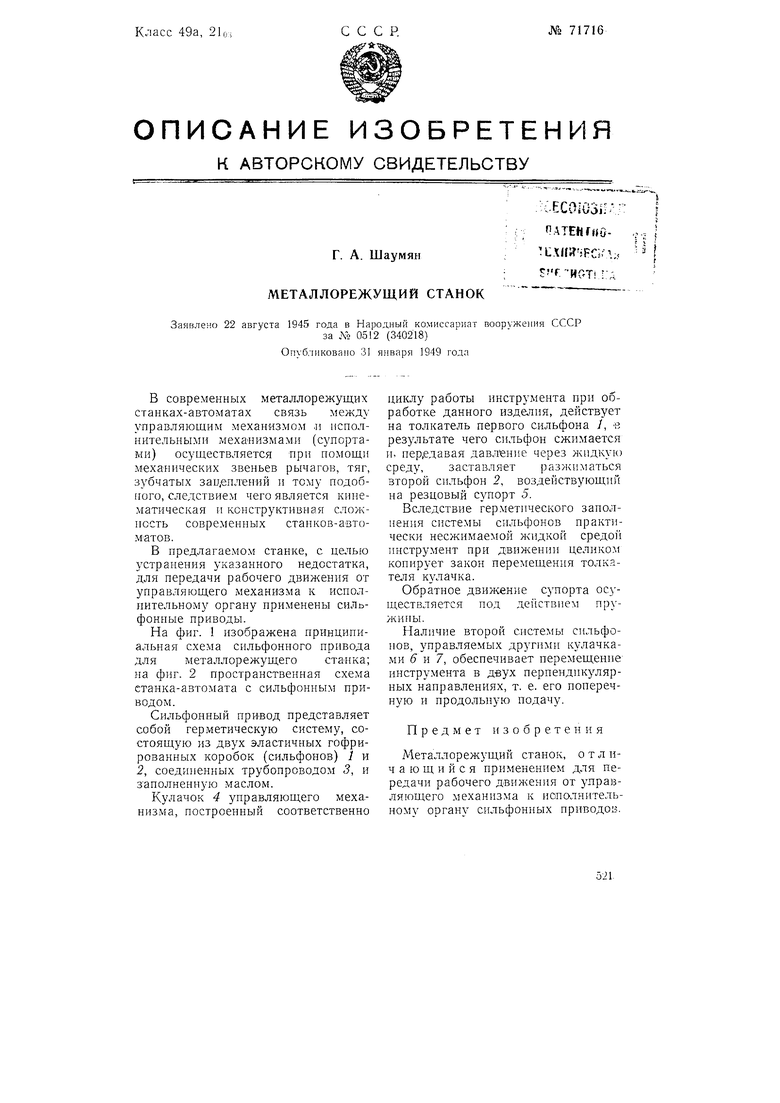
2 3
