В предлагаемом гидравлическом устройстве для бесступенчатого регулирования скоростей привода металлорежущих станков применена замкнутая система двух взаимодействующих гидравлических насосов, включенных в кинематическую цепь между приводным валом и шпинделем станка с помощью двух параллельных диференциалов. Один из диференциалов кинематически связывает ведущие валы обоих насосов с приводным валом. Другой диференциал кинематически связывает ведущий вал одного из насосов и шпиндель с приводным валом. Насосы управляются от золотникового регулятора.
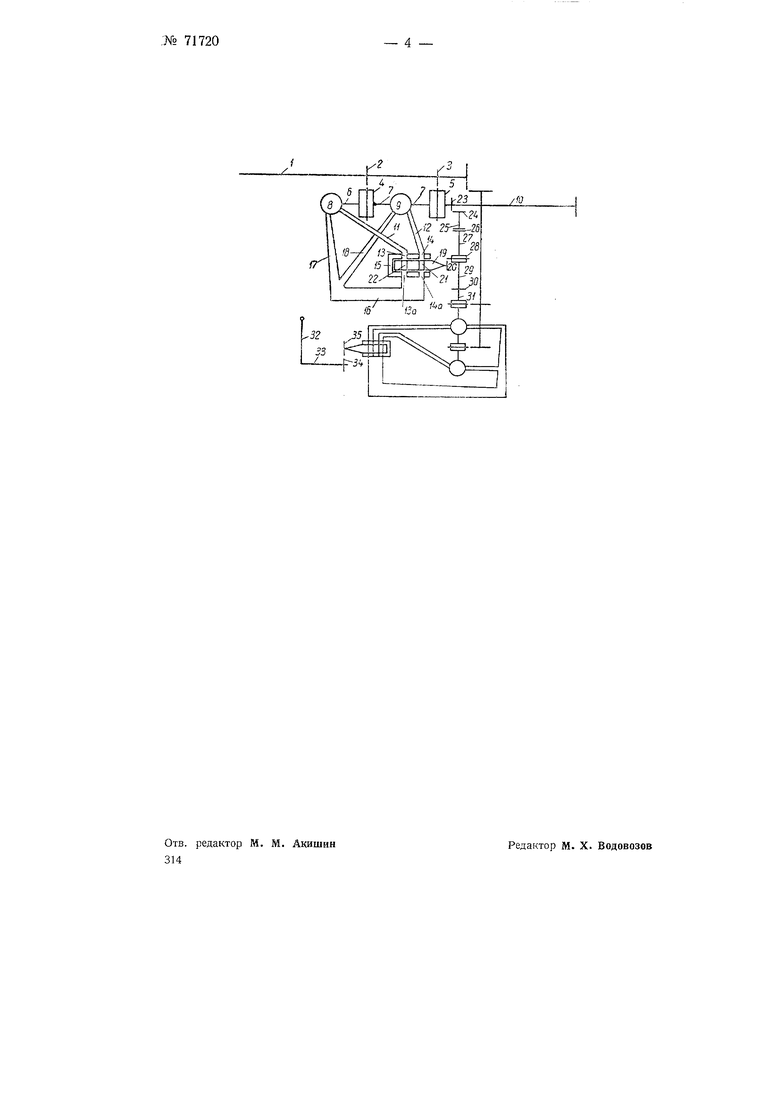
На чертеже изображена кинел атическая и гидравлическая схема предлагаемого устройства.
Устройство для регулирования скоростей состоит из основного механизма, обеспечивающего получение различных скоростей и стабилизатора скоростей, определяющего образование требуемой скорости в условиях рабочей нагрузки станка.
На приводном валу 1 посажены шестерни 2 к 3 находящиеся в постоянном зацеплении с коронными шестернями диференциалов 4 и 5. Полуоси 6 и 7 введены в качестве ведущих валов в гидравлические насосы 8 т 9. Полуось JO является peзvльтaтивньш валом .механиз.ма.
От выпускных отверстий насосов 8 и 9 отходят напорные трубки 77 и 72, идущие к регулятору. Корпус регулятора имеет две пары параллельных сквозных отверстий 13, Т За и 74, 14а. Отверстия 13а и 74а ведут в резервуар 16, который двумя патрубками 17 -я 18 соединен с впускными отверстиями насосов 5 и 9.
Регуляторные насосы, напорные трубки и резервуар заполнены маслом. К внутренней поверхности стенок корпуса регулятора плотно прилегает сердечник 19, который поворачивается при повороте шестерни 20, изготовленной как одно целое с сердечником. Сердечник имеет два сквозных отверстия 21 и 22, которые при его поворотах сообщаются с отверстиями корпуса регулятора в определенной последовательности.
При одном из крайних положений сердечника открыта одна пара отверзи
стий корпуса и полностью закрыта вторая, а при другом крайнем положении- наоборот. При среднем положении сердечника обе пары отверстий открыты наполовину.
На результативном валу механизма 10 посажена шестерня 23, зацепленная с шестерней 24, закрепленной на валике 25. Через постоянно включенную муфту сцепления 26 валик 25 соединяется с полуосью 27 диференциала 28, который коронной шестерней зацепляется с шестеренкой 20 сердечника регулятора.
Полуось 29 посредством закрепленной на ней шестерни соединяется с шестерней 30, жестко насаженной на валик 31 стабилизатора скоростей.
Рычаг управления 32 закреплен на валике 33, на котором заклинен зубчатый сектор 34, сцепленный с шестерней 35 сердечника регулятора стабилизатора.
Действие механизма происходит следующим образом. Приводный вал 7 с помощью шестерен 2 и 5 вращает пробки диференциалов 4 и 5. При этом сердечник регулятора 19 находится в среднем положении так, что парные отверстия корпуса регулятора открыты на одинаковую величину. В этом случае полуоси диференциалов вращаются с одинаковой скоростью, равной скорости диференциалов и в ОДНОЛ1 с ними направлении.
Если сердечник регулятора W повернуть в крайнее положение, при котором закрыты отверстия 74 и 14а и открыты 13 и ТЗа, то нагрузка на насос 9 увеличится до предела, и скорость вращения полуоси 7 уменьшится до нуля. Одновременно с этим нагрузка на насос 8 уменьшится до минимума и скорость полуоси 6 удвоится. В результате скорость результативного вала 10 станет в два раза больше скорости диференциала 5,
Если сердечник регулятора 19 поставить Б другое крайнее положние, то вращение полуоси 6 прекратится, а полуось 7 станет вращаться с удвоенной скоростью по отношению скорости диференциала. Поскольку полуось 7 является полуосью обоих
312
диференциалов, то вращение вала 10 полуоси 6 прекратится.
Таким образом двум крайним положениям сердечника регулятора соответствуют две крайние величины скоростей вращения результативного вала. Всем промежуточным положениям сердечника будут соответствовать промежуточные скорости вращения результативного вала. При этих условиях можно получить на результативном валу любую скорость положительного направления в диапазоне от нуля до удвоенной скорости коробки диференциала. Этот диапазон скоростей без изменения его величины можно перемещать по числовой оси как в положительную, так и в отрицательную стороны путем изменения скоростного передаточного отношения между коронной шестерней диференциала 5 и шестерней 3. При этом увеличением скоростного отношения диапазон будет перемещаться в положительном направлении, уменьшением его - в отрицательном. Уменьшая скоростное передаточное отношение между коронной шестерней диференциала 5 и шестерней 3, можно достигнуть такой его величины, при которой двум крайним положениям сердечника регулятора будут соответствовать одинаковые по величине, но противоположные по направлению скорости результативного вала. При этом средним между ними положениям сердечника будут соответствовать средние скорости вращения результативного вала.
Описанные случаи получения различных скоростей на результативном валу механизма возможны при отсутствии на нем нагрузки. Для обеспечения получения на результативном валу требующейся скорости вне зависимости от величины преодолеваемого им сопротивления служит стабилизатор скоростей, показанный в нижней части схемы.
Полуось 27 диференциала 28 можно соединить с помощью шестерен 23 VI 24 с результативным валом основного механизма образования скоростей так, чтобы вращением результативного вала сердечник регулятора
19 коронной шестерней диференциала 28 поворачивался в сторону, уменьшающую скорость этого вращения, а полуось 29 соединить с другим механизмом так, чтобы ее вращением сердечник регулятора поворачивался в сторону, увеличивающую скорость вращения в этом направлении результативного вала. В этом случае будет осуществлено условие, при котором сердечник регулятора 79 автоматически будет устанавливаться в положение, обеспечивающее такую скорость вращения в прямом и обратном направлениях результативного вала W, с которой вращается полуось 29 диференциала 28.
Механизм образования скоростей стабилизатора по своему устройству не отличается от основного механизма образования скоростей. Изменением положения сердечника регулятора стабилизатора путем воздействия с помощью рычага 32 зубчатого сектора 34 на шестерню 35 может быть установлена любая величина скорости вращения результативного вала стабилизатора 31 в пределах рабочего диапазона скоростей основного механизма, а следовательно, и результативного вала /О основного механизма.
При наличии определенной нагрузки на результативном валу 10 таких же результатов в получении скоростей можно достигнуть без насоса Р, пользуясь одним насосол 8. Для этого достаточно разрезать на две части полуось 7 и соединить эти половинки с помощью двух шестерен таким образом, чтобы они относительно друг друга могли вращаться только в противоположные стороны.
Для получения различных скоростей только одного направления достаточно в основном механизме образования скоростей ограничиться диференциалом 5 и насосом .9, отбросив диференциал 4 и насос 8.
Предмет изобретения
1.Гидравлическое устройство для бесступенчатого регулирования скоростей привода лгеталлорежущих станков с использованием взаимодействующих между собой и кинематически связанных с приводом и шпинделем станка гидравлических насосов, управляемых поворотными распределительными золотниками - устройство, отличающееся применением замкнутой гидравлической системы двух взаимодействующих гидравлических насосов 5 и 9, управляемых от золотникового регулятора 15, включенных в кинематическую цепь между приводным валом 7 и шпинделем 10 станка с помощью двух параллельных диференциалов, один из которых, диференциал 4, кинематически связывает ведущие валы обоих насосов с приводным валом, а другой, диференциал 5, кинематически связывает ведущий вал насоса 9 и шпиндель 10 с приводным валом.
2.Форма выполнения устройства по п. 1, отличающаяся тем, что с целью автоматической стабилизации скорости вращения шпинделя при изл1енении нагрузки, поворотный сердечник золотника 15 посредством диференциала 28 кинематически связан со шпинделем станка и с ведущим валом одного из гидравлических насосов второй, аналогичной первой, замкнутой гидравлической системы, насосы которой приводятся в движение посредством двух параллельно включенных самостоятельных диференциалов от приводного вала 7 и управляются от руки золотниковым регулятором 35.
| название | год | авторы | номер документа |
|---|---|---|---|
| Передача к строгальному станку | 1935 |
|
SU49728A1 |
| Прибор для автоматической съемки плана железнодорожного пути | 1928 |
|
SU19803A1 |
| Приспособление к автомобилю для езды по рельсам | 1927 |
|
SU11227A1 |
| КОЛЕСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2407668C2 |
| Автоматический станок для обработки фасонных поверхностей | 1936 |
|
SU53886A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| Планетарная реверсивная передача | 1944 |
|
SU66601A1 |
| Устройство для автоматического регулирования нагрузки на буровой инструмент | 1936 |
|
SU52848A1 |
| Прибор для упражнения в стрельбе по морским целям | 1930 |
|
SU25074A1 |
| Устройство для сигнализации о перегрузке стрелового крана | 1941 |
|
SU68333A1 |