(54) ЗЕМЛЕРОЙНАЯ МАШИНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Землеройная машина | 1980 |
|
SU909057A1 |
| МАШИНА ДЛЯ РЫТЬЯ ТРАНШЕЙ | 1966 |
|
SU184732A1 |
| Землеройная машина | 1981 |
|
SU973730A1 |
| Землеройная машина для отрывки траншей и котлованов | 1984 |
|
SU1208147A1 |
| Землеройная машина | 1979 |
|
SU861510A1 |
| Землеройная машина | 1981 |
|
SU969834A1 |
| ЗЕМЛЕРОЙНАЯ МАШИНА | 1991 |
|
RU2046890C1 |
| Землеройная машина | 1976 |
|
SU608888A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ТРАНШЕЙНО-КОТЛОВАННОЙ МАШИНЫ И ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ РАБОЧЕГО ОБОРУДОВАНИЯ | 2008 |
|
RU2371551C1 |
| ВСЕСОЮЗНАЯ f штт-^тттщ | 1973 |
|
SU386070A1 |
1
Изобретение относится к области строительства и может быть использовано на машинах для рытья траншей и котлованов.
Известны землеройные машины, включающие тягач и раму с цепным, рабочим органом 1. Недостатком указанных машин является невозможность отрывки котлована шириной, большей ширины цепного рабочего органа.
Известна землеройная машиНа, включак)ш:ая тягач, навесную раму, шарнирно присоединенную к ней поворотную раму с цепным рабочим органом и метателем грунта, механизм качания поворотной рамы и электрогидравлическую систему автоматического управления рабочим органом с исполнительными гидроцилиндрами и контактными конечными выключателями, которые при механическом контакте с упорами подают сигнал на электромагниты золотника, приводящего в действие исполнительные гидроцилиндры 2. Известная машина за счет качания рабочего органа в определенном угле, ограниченном упорами и конечными выключателями, обеспечивает отрывку котлована, ширина которого превосходит
ширину цепного рабочего органа. Эта машийа обладает следующими недостатками:
-контактная пара: наконечник конечногб выключателя - сопряженная поверхность упора по принципу действия не может
быть защи1цена от воздействия окружающей среды - 3anbUeHHocTH, влажности, низких и высоких температур, - что приводит к ее интенсивному износу, последующему искажению профилей контактной пары, заклиниванию, выходу из строя с одновременным изменением установленной ширины котлована и поломкой рабочего органа;
-использование в известных решениях для регулирования ширины котлованов линейноперемещаемых упоров со впадинами,
в которые вхоДит фиксирующий винт или шарик, не обеспечивает высокой точности регулирования угла качания, поскольку минимальный размер между впадинами, определяющий наименьшую разность между соседними значениями уставок угла поворота, не может быть принят очень малым по соображениям надежности в условиях силовой фиксации упора;
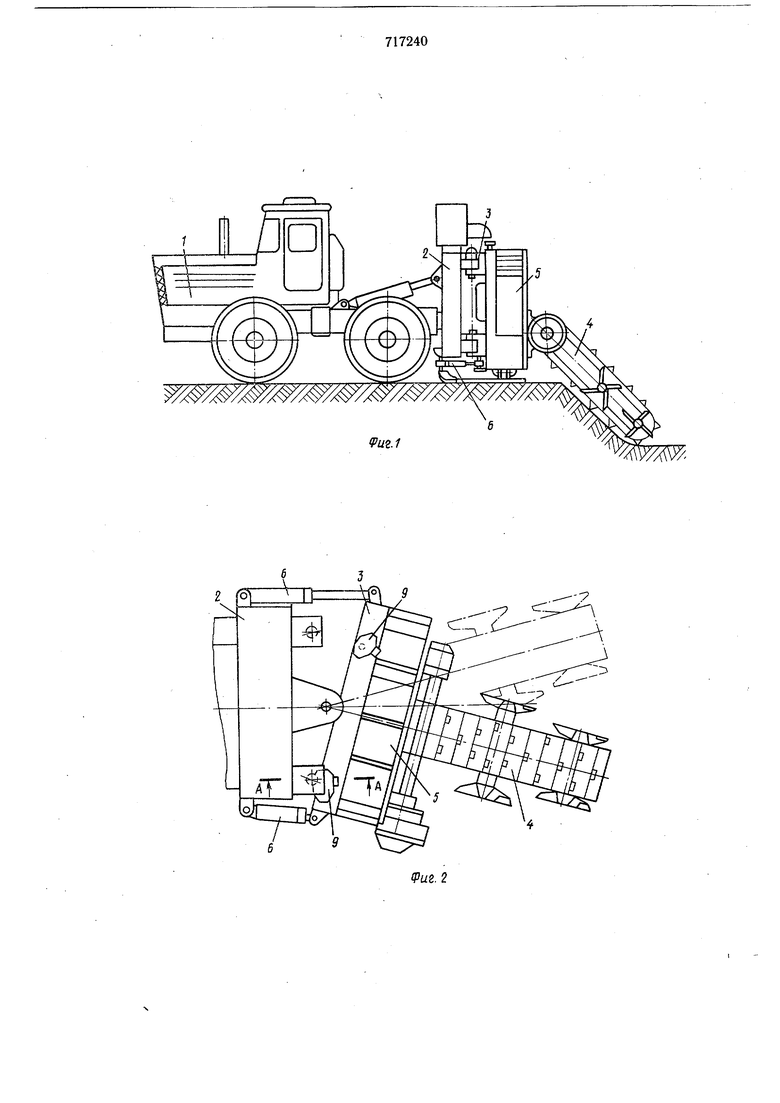
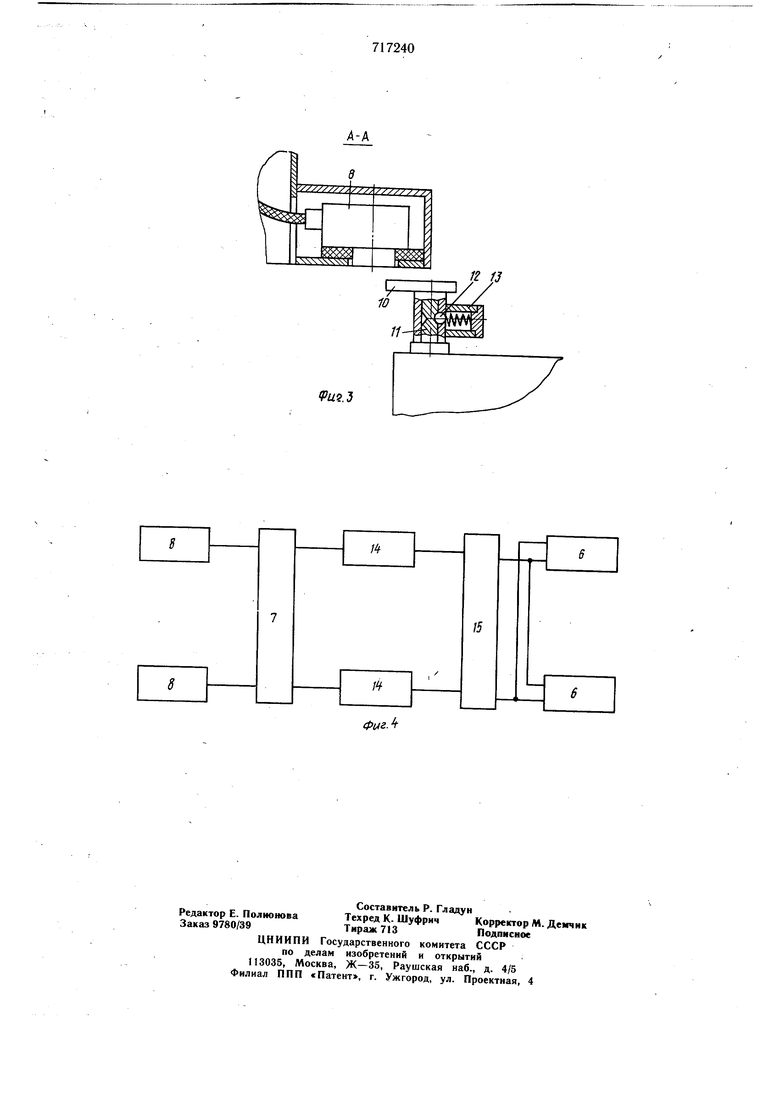
-неудобство эксплуатации в связи с необходимостью перемещения рейки по направляющим при незащищенности от воздействия внешней среды. Целью изобретения является повышение надежности и точности регулирования угла качания. Это достигается тем, что электрогидравлическая система автоматического управления рабочим органом снабжена револьверным задатчиком угла качания и триггером, к входам которого подключены конечные выключатели, индуктивно взаимодействующие с револьверным задатчиком угла качания. При этом револьверный задатчик угла качания выполнен в виде поворотного многогранника с эксцентрично расположенной осью вращения и фиксатором положения и с числом граней по количеству требуемых значений угла качания. На фиг. 1 показана землеройная машина, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - функциональная схема управления механизмом качания поворотной рамы. Мащина состоит из тягача 1, навесной рамы 2, шарнирно к ней присоединенной поворотной рамы 3 с цепным рабочим органом 4, метателем грунта 5 и механизмом качания поворотной рамы, исполнительными гидроцилиндрами 6. В цепи управления исполнительными гидроцилиндрами 6 установлен триггер 7 с двумя входами, соединенньши с бесконтактными конечными выключателями 8, каждый из которых индуктивно связан с револьверным задатчиком угла качания 9 в виде многогранника 10 с эксцентрично расположенной осью 11 и фиксатора положения в виде подпружиненного шарика 12, расположе1|ного в опоре 13 задатчика. На оси П имеются лунки, число которых соответствует числу рабочих граней многогранника 10. Выходные зажимы триггера 7 подключены к электромагнитам 14 золотника 15 управления исполнительными гидроцилиндрами 6. Землеройная мащина работает следующим образом. Цепной рабочий орган 4 получает вращение, разрабатывает грунт и транспортирует его к метателю 5, который выбрасывает его в сторону. При отрывке котлована включается механизм качания поворотной рамы 3. Под действием исполнительных гидроцилиндров 6, управляемых золотником 15 по сигналу, подаваемому с триггера 7, находящегося в одном из двух устойчивых соетояний, на электромагниты 14 золотника 15, поворотная рама 3 с цепным рабочим органом 4 и метателем грунта 5 совершает поперечное перемещение (качение). В конце хода качания задатчик угла качания 9 приближается рабочей гранью многогранника 10 к одному из бесконтактных конечных выключателей 8, вследствие чего на выходе конечного выключателя, соединенном с соответствующим входом триггера 7, появляется сигнал, под действием которого триггер переходит в другое устойчивое состояние и этому состоянию соответствует появление сигнала на другом выходе триггера 7. Под действием выходного сигнала триггера 7 включается соответствующий электромагнит 14 золотника 15, управляющего исполнительными гидроцилиндрами 6, которые начинают новый цикл автоматического перемещения поворотной рамы 3 с цепным рабочим органом 4 и метателем грунта 5 в противоположном направлении и т. д. При необходимости изменить ширину котлована, а следовательно, и угол качания, поворачивают многогранник 10 требуемой гранью к соответствующему бесконтактному конечному выключателю 9. Землеройная машина за счет исключения контактных пар механизма качания, работающего в неблагоприятных условиях внешней среды, обеспечивает надежную безаварийную работу в котлованном режиме. Высокая точность регулирования угла качания достигается за счет получения какой угодно малой разности расстояний от рабочих граней многогранника до его оси. Отсутствие нагрузок на задатчик угла качания позволяет снабдить его фиксатором положения с минимальным усилием пружины, что повышает удобство и технологичность при эксплуатации машины. Формула изобретения 1.Землеройная машина, включаюшая тягач, поворотную раму с рабочим органом, например цепным, и метателем грунта, механизм качания поворотной рамы и электрогидравлическую систему автоматического управления рабочим органом с исполнительными гидроцилиндрами и конечными выключателями, отличающаяся тем, что, с целью повышения точности и надежности регулирования угла качания, электрогидравлическая система автоматического управления рабочим органом снабжена револьверным задатчиком угла качания и триггером, к входам которого подключены конечные выключатели, индуктивно взаимодействующие с револьверным задатчиком угла качания. 2.Машина по п. 1, отличающаяся тем, что револьверный задатчик угла качания выполнен в виде поворотного многогранника с эксцентрично расположенной осью враидения и фиксатором положения и с числом граней по количеству требуемых значений угла качания. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 126053, кл. Е 02 F 5/06, 1959. 2.Авторское свидетельство СССР 184732, кл. Е 02 F 5/06, 1965 (прототип). тшттт / / Ш
-г т. шЩ
Pufi.
