I
Изобретение относится к рудничному локомотивному транспорту и может быть использовано для исследования динамических характеристик рудничных локомоти-.ВОВ и систем управления ими, а также ; для аналогичных исследований общепромышленных локомотивов.
Известно устройство fll для исследования локомотивов, содержащее программный блок, датчик пути, связанный с Катковыми парами, механически соединенными между Собой и приводимыми двигателями, блок имитации массы состава в виде маховых масс, блок задания режима движения и регистрирующие приборы.. .,
Однако это устройство не позволяет воспроизвести последовательное во времени увеличение инерционной нагрузки на локомотив при трога нии состава со сжатой сцепкой, а также последовательное во времени воздействие инерционной нагрузки на локомотив при торможении состава с растянутой сцепкой; имеет огранкченный момент сопротивления движению в начальный период разгона и не позволяет исследовать режим работа локомотива при разных условиях сцепления.
Цель изобретения - повышение точности воспроизведения условий разгона и торможения и имитация различных условйй сцепления.
. Поставленная цель достигается тем, что устройство снабжено элементами . сравнения и управляемым от блока задания режима движения ключеввгм элементом, подключенным между выходом датчика тяговых усилий и одним из входов одного элемента сравнения, другой вХод которого соединен с выходом программного блока, а вь1ход - с входом : блока имитации массы состава, подключенного своим выходом к приводу, причем привод вьшолнен следящим, а дви-. гатель нагрузки выполнен гидравлическим и питаемым от параллельно подключенных гидронасосов, Каждый из которых
связан Со своей катковой парой; устройство оборудовано четырьмя гидродомкратами двухстороннего действия с блоками управления их распорами, штоки которых сое инены с рамой локомотива, а цилиндры - с основанием устройства, полости цилиндров соединены трубопроводами с отдельным гидронасосом, приводимым электродвигателем, через реверсивный электрораспределитель, подключённый через блок управления распором к выходу второго элемента Сравнения, один вход которого предназначен для .соединения с выходом дифманометра,
.контролирующего дйвпение распора гйд родомкратов, а второй - с третьим выходом программного блока, причем второ вход блока управления распором п0дкЛючен кчетвертому выходу программного блока. . . V ..
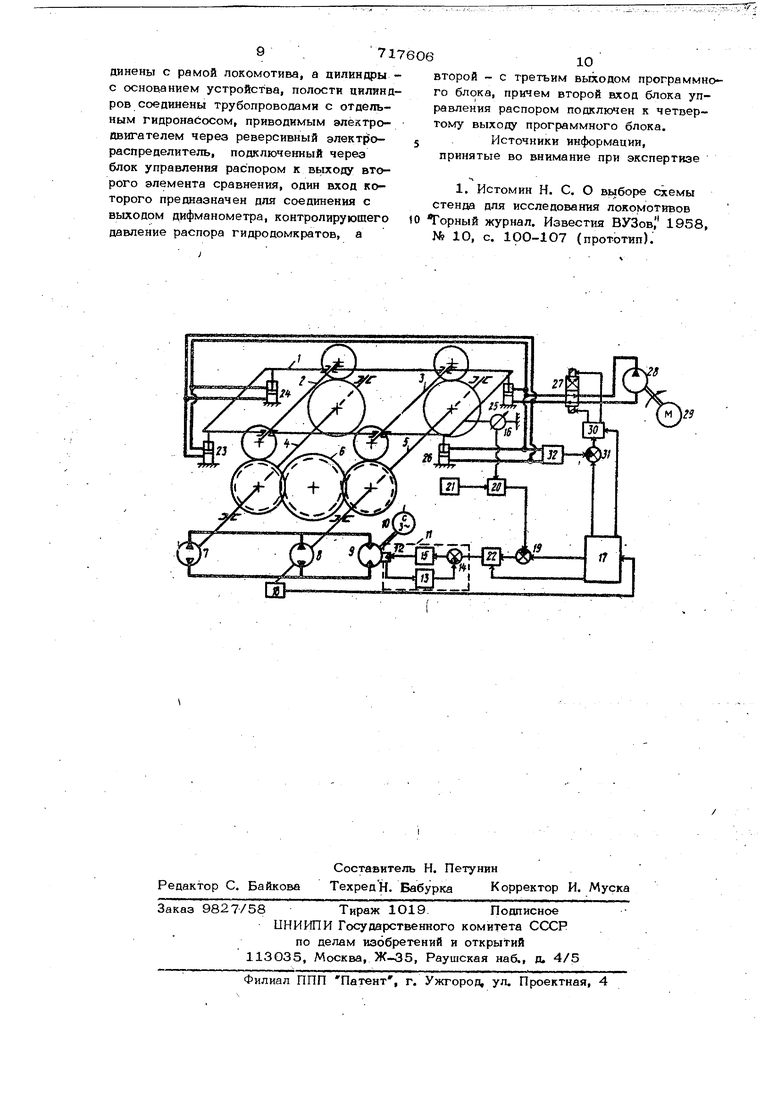
. На чертеже- показана схема описываемогоустройства, ., . ;.
Размещенные в подшипниках рамы 1 локомотива ;колесные пары 2 и 3 взаимодействуют с Катковыми парами 4 и 5, которые с помощью механизма зацеплени 6 жестко связаны между собой. Одна vs3 Шестерен этого механизма подвижна и позвблйет разъединять катковые пары, одна из Которых в свою очёрерь Может перемешаться в пазах рамы и закреплять ся в требуемой точке в зависимости от велич шы жесткой базы noKoivibtHBa, С валами Катковых пар соед№ейи JTlaapoнасосЫ 7 и 8, включенные параллельно
и питающие регулируемый гидрбдбигатель 9, механически соединенный с синхронным электродвигателем 10. Статор ; . регулируемого насоса перемешается следящим приводом 11, состоящим из сервопривода 12, датчика положения ста
.тора 13, элемента сравнения 14 и электрогидравлического усилителя 15. Рама 1 локомотива для удержания последнего на Катковых парах соединена с основанием стенда через датчик тягового усилия 16.
Программный блок 17 служит для задания начальных значений основного сопротивления движению, сопротивлении кривых, сопротивления уклона, задания массы состава и последующего изменения этих величин по заданной программе, в соответствии с сигналами датчика пу ти 18, соединенного с одной из Катковых пар. Первый выходной сигнал программного блока, равный сумме статичес ких сопротивлений движению, поступает
на вход элемента сравнения 19, на второй вход которого через ключевой элемент 20 поступает сигнал от датчика тягового усилия 16. Ключевой элемент служит для изменения знака сигнала датчика тягового усилия при торможении поезда иуправляется от блока задания режима движения .21, . Выходной сигнал элемента сравнения 16 поступает на вход блока имитации массы состава 22, управляемого вторым выходным сшналом программного блока. Выходной сигнал блока имитации массы управляет следящим приводом 11.
Блок имитации Массы состава выполнен в виде магазина емкостей. Аналогия уравнений кинетической эн ергии состава .
Е |ту2;
(т - масса, состава, V - скорость
движения) и запасенной в конденсаторе )ЭнергииЁ .
(С - емкость конденсатора, U - напряжение на нем) позволяет представить массу состава в виде емкости конденсатора, скорость движения - напряж:ением на конденсаторе, а динамическое сопротивление движению - током заряда (разряда) конденсатора,
Замена маховых масс емкостью конденсатора позволяет обеспечить простоту и удобство перестройки на различные весовые нормы состава, а также имитировать одновременное или поочередное троганне вагонов с места при разгоне и одновременное или поочередное их воздействие на локомотив при торможений,
К раме локомотива жестко прикреппяю ся штоки гидррдомкратов 23, 24, 25 в 26, установленных попарно по углам рамы, а их цилиндры жестко соединены с основанием стенда. Гидродомкраты через электрораспределитель 27 йитаЬтся от отдельного гидронасоса 28, йрйвбдимого электродвигателем 29.Элекрорйспределитель управляется блоком управления распором 30, ыа один вход которого поступает сигнал с третьего выхода программного блока, определяющий требуемое направление распора (прижатие или отжатие рамы локомотива к Катковым парам), а на другой выходной сигнал второго элемента сравнния 31. На первый вход последнего поступает сигнал с четвертого выхода |программного блока, соответствующий заданной величине распора (коэффидиенту сцепления), а на второй еход - сигна от дифманометра 32, контролирующего разность давлений в трубопроводах питания гидродомкратов. Изменение силы прижатия колесных пар к Катковым парам позволяет в процессе исследований имитировать изменение услрвий сцепления на раэличньк участках щгти. Устройство работает следующим образом. Локомотив устанавйивакэт на катковы пары и закрепляют в этом положении, В программном блоке задают требуемые значения массы состава, оснобного сопротивления движе5йи б, сопротивления кривых и уклонов (подъемов), усйовйя сцепления, условия трога ий и эамедяения состава (одаовременные для всех вагонов или последовательные во времени), а также программа изменения требуемых параметров в за ванных точках или на задайных участках пути. Статическое сопрот-ивпение движеашб (уклоноб, кривых, основное сопротивление) задается Ь программном блоке 17 I соответствуюшими напряжениями, причем суммарный сигнал, эквивалентный сумме сопротивлений движению состава,-поступает на вход элемента сравнения 19, ва ЁтброЙ вход которого подается сигнал датчика тяговогО усилия 16. Разностшлй сигнал поступает на вход блока имитации массысостава 22, управляемого первым выходом программного блока, который осуществляет набор емкостей в соответствии с заданной массой сое-(ь тава и их одновременное или последовательное подключение в режимах разГойй НИИ торможения для имитации одновременного или последовательного трогаиия ИЛИ торможения вагонов состава. После включения локомотива его колесйые пары 2 и 3 перадают вращающий момент через катковые пары 4 и 5 Связанным с ними гидронасосам 7 и 8, питающим гидродвигатель 9. Статов liocледнего в начальный момент времени находится 6 нейтральном положении, поэто Му жидаосТь через гидродвигатель не протекйеТ и каткОйые пары затормо кены Тяговое усилие локомотива, а следовательно, и давление в гидромагистрали между гидронасосами и гидродвигателем всерастают. Тяговое усилие преобразуется датчиком усилия 16 в напряжение, 7 Об.6 поступаьсцее на вход элемента сравнения 19 через ключевой элемент 2 О. Когда выхопной сигнал датчика тягового усилия 16 превысит, сигнал на первом выходе прот-раммного блока 17, соответствующий суммарному сопротивлению движению, выходной сигнал элемента сравнения 19 заряжает емкость блока имитации массы состава 22, выходаое напряжение которого управляет следящим приводом 11 статора гидродвигателя 9. Статор перемещается, тактовые пары растормаживаются и колеСные пары локомотива начинают вращаться. При малом смещении статора гидродвигателя расход жидкости через негО обеспечивается быстрым его вращением. Когда скорость вращения гидродв игателя |превысит синхронную скорость соединенJHoro с ним сИйхрОйного электродвигателя 10, последний переходит в реясим генератора, отдавая энергий в сет6. Благодаря этому обеспечвйается требуемый момент сопротивления движению колесных пар локомотива. I Расход жидкости через гидродвИгатель йропорционален, с одаой стороны, скорости вращения гиДрбнёСосЪв, т,е. действительной скорости состава, и, с другой стороны, смещению статора, т.е. напрязйвййК) на выходе блока имитации массы состава, которое принято аналогом скорости движения. Таким образом, в . cftigaeMdM устройстве постоянно контролйруется соответст1вие между действитель- Hoii и Имитируемой скоростью движения, i После разгона локомотива сигнал датчика тяговоГо равен сигналу на первом выходе npofpiaMMtiOro блока, поэтому дальнейщего заряда емкости блока имитации массы-Состава не происходит, а сигнал на выходе этого блока сохраняется постоянным. Осуществляется режим движения с постоянной скоростью. При выключении двигателей локомо тива (движение по инерции) сигнал на выходе датчика тяГового усилия отсутствует. Емкость блока имитации массы 2 разряжается сигналом с первого вьрсода программного блока 17, поэтому статор гидродвигателя нагрузку смешается к нейтральному положению. Скорость колесных пар локомотива, а следовательно, и производительность гидронасосов падают, вследствие чего скорость вращения гидро двигателя уменьшается. Когда она (становится меньше синхронной скорости вращения электо«-1- двигателя lO, последний переходит из генераторного режима в двигательный, а гидродвигатель 9 - в насосный режим. При этом гидронасосы 7 и 8 работают как гидродвигатели, вращая через катковые пары 4 и 5 колесные пары локомотива 2 и 3, По мере разряда емкости блока имитации массы. 22, т.е. по мере расходования запасенной составом энер гии, статор гидродвигателя смещается ближе к нейтральному положению, количество подаваемой гидродв ига телекс жидкости уменьшается, поэтому скорость вращения гидронасосов снижается. При полном разряде емкости статор гидродвигателя приходит в нейтральное положение, поэтому гидронасосы останавливаются, а вместе с ними катковые и колесные пары. В режиме торможения блок задания режима движения 21 посредством ключевого элемента 20 изменяет полярност сигнала, подаваемого от датчика тягового усилия 16 на элемент сравнения 19, При этом режиме гидродвигатель 9 также работает как гидронасос, а гидронасосы 7 и 8 - как гидро двигатели, араш.ая через катковые пары колесные пар локомотива, которые тормозятся установ ленными на локомотиве тормозными средствами. Емкость блока имитации ма сы состава разряжается суммарнь1м сигналом от датчика усилия, соответствующего тормозному сопротивлению, и от программного блока, соответствующего статическому сопротивлению движению состава. Уменьшение напряжения на емкости приводит к смещению статора гид родвигателя 9 к нейтральному положени скорость вращения Катковых пар уменьшается. При полном разряде емкости катковые пары останавливаются. Для имитации условий сцепления вклю i чается электродвигатель 29, приводящий в действие гидронасос 28, а в программном блоке 17 .устанавливаются требуемое направление (прижатие или.отжатие колесных пар к Катковым) и величина распора. Б.чок управления распором 30, управляемый программным блоком, вклю чает электрораспределитель 27 и в гидродомкраты 23, 24, 25 и 26 поступает жидкость. Дифманометр 32 измеряет раз ность давлений в полостях гидродомкратов, которая пропорциональна усилию прт-окатия (или отжатия) колесных пар локомотива к Катковым. При достижении заданной величины распора сигнал на выходе второго элемента сравнения 31 становится равным нулю, блок управления распором 30 переводит электрораспределитель 27 Б нейтральное положение, поэтому гидродомкраты обеспечивают постоянное усилие прижатия (огжатия), Еспи требуется имитировать различные условия сцепления на отдельных участках пути, соответствующая программа вводится в программный блок, который по сигналам датчика пути 18 изменяет свой сигнал, поступающий на вход второго элемента сравнения 31, обеспечивая изменение усилия прижатия (отжатия) колесных пар к Катковым. Таким образом, описываемое устройство позволяет повысить точность воспроизведения условий разгона и торможеВИЯ локомотива, а также имитировать изменение условий сцепления его колес с , рельсами. Формула изобретения 1, Устройство для исследования рудничных Локомотивов, содержащее программный блок, датчик пути, соединенный с Катковыми парами, механически связанными между собой и приводными даигателями, датчик тяговых усилий, блок имитации масОы состава, блсК задания режима движения и регистрирующие приборы, отличающееся тем, что, с нелью повыщен-ня точности восфоизведения условий разгона и торможения, оно снабжено элементами сравнения и управляемым от блока заданий режима Движения ключевым элементом, подкшоченным между выходом датчика .тяговых усилий и одним из входов одного элемента сравнеам, другой вход которого соединен с выходом программного блока, а выход - с входом блока имитации массы состава, подключенного своим выходом к привоЕ, причем привод выполнен следящим, а двиг-атель нагрузки выполнен гидравлическим и питаемым от параллельно подключенных гидронасосов, каждый из которых связан со своей катковой парой. 2. Устройство по ш 1, о т л и чающееся тем что, с целью имитации различных условий сцепления, оно оборудовано четырьмя гидро домкратам и двухстороннего действия с блоком управления их распорами, штоки которых соединены с рамой локомотива, а цилиноры с основанием устройства, полости цилинд ров соединены трубопроводами с отдельным гидронасосом, приводимым электродвигателем через реверсивный электрораспределитель, подключенный через блок управления распором к вьисоду второго элемента сравнения, один вход которого предназначен для соединения с выходом дифманометра, контролирующего давление распора гидродомкратов, а 71 второй с третьим выходом программного блока, причем второй вход блока управления распором подключен к четвертому выходу программного блока. Источники информации, принятые во внимание при экспертизе 1. Истомин Н. С, О выборе схемы стенда для исследования локомотивов Горный журнал. Известия ВУЗовГ 1958, № 1О, с. 1ОО-1О7 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Испытательный стенд электропривода локомотива | 1991 |
|
SU1788454A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАГИСТРАЛЬНЫМ ЭЛЕКТРОВОЗОМ | 1966 |
|
SU187079A1 |
| Способ испытаний локомотива на катковом стенде | 1984 |
|
SU1203396A1 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ТЯГОВОМ ПРИВОДЕ ЛОКОМОТИВОВ С ЭЛЕКТРОПЕРЕДАЧЕЙ | 2013 |
|
RU2550105C1 |
| УСТРОЙСТВО ДЛЯ УВЕЛИЧЕНИЯ СЦЕПЛЕНИЯ КОЛЕСНОЙ ПАРЫ ТЕПЛОВОЗА С РЕЛЬСАМИ | 2007 |
|
RU2340491C1 |
| КАТКОВЫЙ СТЕНД ДЛЯ ИСПЫТАНИЯ КОЛЕСНЬ[Х ПАР РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА | 1970 |
|
SU287375A1 |
| Устройство обнаружения боксования и юза колес транспортного средства | 1986 |
|
SU1371933A1 |
| УСТРОЙСТВО ДЛЯ УВЕЛИЧЕНИЯ СЦЕПЛЕНИЯ ВЕДУЩИХ КОЛЕС ЛОКОМОТИВА С РЕЛЬСАМИ | 2019 |
|
RU2717414C1 |
| СТЕНД МАГНИТОПОРОШКОВОГО КОНТРОЛЯ ЗУБЧАТЫХ КОЛЕС | 2015 |
|
RU2601295C1 |
| Способ испытания колесных транспортных средств и стенд для его осуществления | 1982 |
|
SU1146566A1 |
