(54) ЦИФРОВОЙ ЧАСТОТНО-МОДУЛИРОВАННЬГЙ ВЫСОТОМЕР


| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ РАДИОВЫСОТОМЕР | 2003 |
|
RU2263330C2 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 2003 |
|
RU2234718C1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1996 |
|
RU2106655C1 |
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ВЫСОТОМЕР | 1998 |
|
RU2133483C1 |
| РАДИОВЫСОТОМЕР С ЧАСТОТНО-МОДУЛИРОВАННЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 2012 |
|
RU2519952C2 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАЛЬНОСТИ (ВАРИАНТЫ) | 1999 |
|
RU2154285C1 |
| РАДИОВЫСОТОМЕР | 2001 |
|
RU2212684C1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| РАДИОВЫСОТОМЕР С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2030762C1 |
| РАДИОМОДЕМ | 2024 |
|
RU2830959C1 |


1
Изобретение относится к радиолокации.
Известен цифровой частотно-моцулированный высотомер, работающий по принципу выделения и обработки разностной частоты между прямым сигналом передатчика, непрерывно излучаемым в направлении к земно поверхности, и отраженным от земли эхо-сигналом 11,.
Недостатком такого высотомера является широкополосность прием1щка, что снижает чувствительность и помехозащищенность.
Наиболее близким техническим решением к данному изобретению является цифровой частотно-модулированный .высотомер, содержащий последовательно соединенные приемную антенну, смеситель, усилитель разностной частоты и счетчик-вычислитель, последовательно соединенные блок переключения направления перестройки передатчика, модулятор, передатчик и передающую антенну, при этом второй и третий выходы передатчика соединены соответственно с вторым входом- смесителя и первым входом блока выделения измерительного интервала полосы модуляции, второй вход
которого соединен с первым выходом генератора тактовых импульсов, второй выход которого и выход блока выделения измерительного интервала полосы модуляции соединены соответственно с третьим и вторым входами счетчика-вычислителя 2.
в известном высотомере вследствие неизменности скорости перестройки передат чика, разностная частота отраженного от земли сигнала на Максимальной и минимальной рабочих высотах отличается в несколько сотен раз. Для обеспечения работы такого вь1сотомера требуется широкополосный приемник с полосой пропускания несколько сотен килогерц, что снижает чувствительность высотомера из-за воздействия внутренних шумов и внешних помех.
Цель изобретения - .увеличение чувствительности.
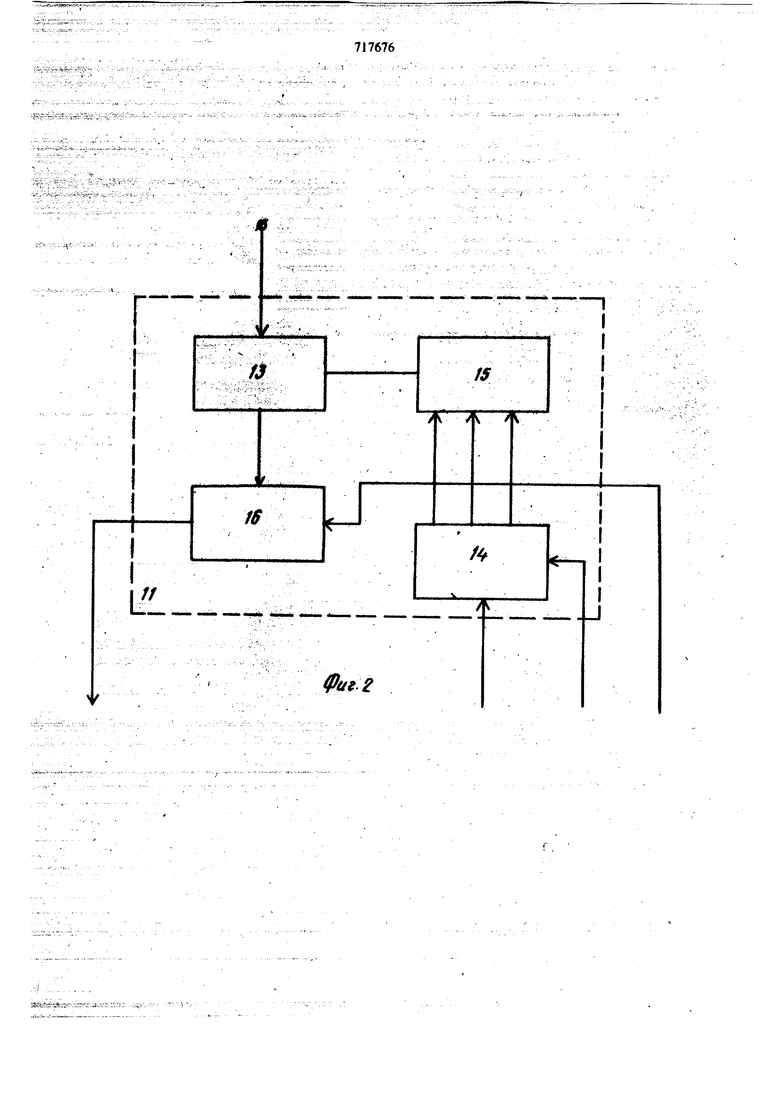
Для этого в цифровой частотно-модулированный высотомер, содержащий последовательно соединенны приемную антенну, смеситель, усилитель разностной частоты и счетчик-вы- числитель, последова7слТ)НО соединенные блок переключения направления перестройки передатчика, модупятор, передатчик и передающую антенну, при этом второй и третий выходы передатчика соединены соответственно с вторым входом смесителя и первым входом блок вьщеления измерительного интервала полосы модуляции, второй вход которого соедгшен с первым Ьътходом генератора тактовьЬс импульсов, второй выход которого и выход блока вЩёления измерительного интервала полосы модуляций соединены соответственно с третьим И вторым входами счетчика-вычислителя, введены источник опорного аналогового сигнала и блок цифрового управления скоростью перестройки частоты передатчика, аналоговый йШйрего соединён е управйякищё входом модулятора, первый, второй, аналоговый и одфровой входы блока цифрового управлешш скоростью перестройки час1шъ: передатчика соединены соответственно е третьим выходом Шш1йШ а тйкШ Ш ийЩЖсовГ вШодШ усилителя разностной частоты, В1.1ходом источника опорного аналогового сигнала и пер ЖШ- кодовым выходом счетчика-вычислителя, второй кодовый виход которого соединен с Вторым входом усилителя разностной частоты, а блок цифров го упрШЖнйя скоростШ пере стройки частоты передатчика содержит последовательно соединенные реверсивный счетчик, первый декодирующий преобразователь и второй декодирующий преобразователь, цифровой релейный злемент, выходы которого соеДийеньгс тактовыми и управляющими вхо дШГрШёрейВйбт счетчика, при этом выход второго декодирующего преобразователя является аналоговым выходом блока цифрового управления скоростью перестройки частоты передатчика, а первый и второй входы цифро вого релейного элемента, аналоговый вход первого декодирующего преобразователя и циф ровЬй вход второго декодирзтощего преобразователя являются соответственно первым, вторым, аналоговым и цифровьш вхбдаШ блока дафрового управлешй скоростью перестройки«частоты передатчика. На фиг. 1 изображена структурная электри ческая схема предложенного высотомера; на фиг. .2 - вариант реализации блока цифрового управления скоростью перестройки «асто ты передатчика; на фиг. 3, 4 - временные диаграммы поясняющие работу высотомера. Высотомер (фиг. I) содержит модулятор 1, передатчик 2, передающую антенну 3, приемную антенну 4, смеситель 5, усилитель 6 разностной частоты, блок 7-выделешя измёрй ейбйОгоинтервала полосы модуляции, блок 8 переключения направления перестройки передатчика, счетчик-вычислитель 9, гене 4ратор 1U тактовых импульсов, блок 11 цйф рового управления скоростью перестройки частоты передатчика и источник 12 опорного аналогового сигнала. Блок 11 (шфрового управления скоростью перестройки частоты передатчика (фиг, 2) содержит первый декодирующий преобразователь 13, цифровой релейный элемент 14, реверсивный счетчик 15 и второй декодирующий преобразователь 16. Высотомер работает следующим образом. При перестройке модулятором 1 частоты передатчика 2 (фиг. За) смеситель 5 вьщеляет разностную частоту между сигналом, который непосредственно поступает от передатчика 2 и сигналом, который проходнЁТ путь: передатчик 2 - передающая антенна 3 земная поверхность - приемная антенна 4 смеситель 5. Сигнал разностной частотьг от смесителя 5 усиливается в усилителе 6 и подается на счетчик-вычйслитель 9 дая вычисления приращения фазы разностной частоты на заданном числе измерительвых йнтерв шов и на цифровой релейный элемент 14 для сравнения с опорной тактовой частотой. В общем случае счетадк-вычислитель 9 может вычислять приращения фазы ца любом целом числе измерительных интервалов, исходя из особенностей построения радиовысотомера и с любой степенью точности, определяемой тактовой частотой. На фиг. 3 показан процесс счета и обновле1шя информации на двух измерительных интервалах, то есть на одном периоде модуляции. обеспечения циклической рабр1ТЫ на счетчик-вычислитель 9 и блок 8 переключения направления перестройки передатчика подаются синхронизирующие сигналы от блока 7 выделения измерительного интервала полосы модуляции. Так, в момент ti, когда при перестройке . вйиз частота передатчика 2 достигнет нижней границы fmi измерительного интервала (фиг. За), блок 7 выдает сигнал запрета (фиг. 36) ,в счетчик-вычислитель 9, чем останавливает дальнейцшй счет. Кроме того, в момент ti блок 7 вьщает сигнал в блок 8 переключения направления перестройки, передатчика, которое с небольщой задержкой, определяемой тактовой частотой, в момент tj Еьщает в модулятор 1 сигнал на переключе1ше направления хода перестройки. В промежутке меглу ti и tj блок 7 вьщает в счетчик-вычислитель 9 импульс разрещещш записи (фиг. Зв), по которому в память счетчика-вычислителя 9 записьгоается число N (фиг. Зе), сосчитанное счетчиком 5 вычислителем 9 на предыдущем цикле счета (пТ-Т) и импульс установки О, который устанавливает счётчик в начальное состояние (фиг. Зг). В момент 1з, когда частота передатчика 2 снова достигнет нижней границы f. Tmv измерительного интервала, но уже при перестройке снизу вверх, блок 7- выделения измерительного интер вала снимает сигнал запрета (фиг. Зв). В момент t4, когда частота передатчика 2 достигнет верхней границы ffnA измерительного интервала Мл, блок 7 снова выдает сигнал запрета в счетчиквычислитель 9, а в момент ts сигнал в блок 8 для изменения напрйвлёння перестройки, частоть передатчика. В момент te частота передатчика 2 достигает верхней границы fniA измерительного интервала, блок 7 снимает сигнал запрета (фиг. 36). Счетчик-вычислитель 9 в момент tg продолжает счет с того положения, в KptopOM остановился в моМеят t4. В момент 7 ког j частота передатчика 2 достигает нижней . границы ffp измерительного интервала, блок 7 снова останавливает счетчик-вычислитель 9, выдает сигнал разрешения (фиг. Зв) на запись информации NC в счетчике-вычисЛителе (фиг. Зяс) дпв обновления числа намята и производит установку счетчика в исходное состояние. Далее процесс сброса счета и обновления информации повторяется. ТЬк как циФровь1е схемы обладают высоким быстродействием, то длительность интер&:ала времени от t до 13, от 14 до tg и tHK далее может быть сделана во много раз меньше, чем длительность периода частоты биений. Это позволяет, в принципе, сойтись без формирования сигнала запрета, если измерительный интервал полосы модул дам Af4 может быть сделан равным всей полове модуляции от ffnin ДО fmaxДля повышения чувствительности и пснмюхо-, N защищенности радиовысотомера за счет з э4сополосного приема необходимо обеспечить, i чтобы при изменении высоты разностная 4aicтота находилась в. полосе пропускания узкополосного .усилителя 6. Это обеспечивается тем, что с высотой скорость перестройки частота передатчика изменяется в зависимости от числа на вЫходе сметчика-вЫчислиТеля 9. Код счетчика-вычислителя 9 подается на первь1Й декодирующий преобразователь 13, вьрсодной сигнал которого Л,.р (фиг. 4г) удовлетворяет следующему условию: )г где Ре деко проп где А - аналоговый сигнал на выходе второго декбдируюшего преобразователя;Ы(пТ-т)- результат вычислений счетчикавычислителя на предыдущем периоде измерения; п - порядковый номер периода измерения Т.. Сигнал разностной частоты fp сравнивается в цифровом релейном элементе 14 с опорной тактовой частотой. На фиг. 4 показан процесс сравнения и управления при характеристике релейного элемента, удовлетворяющей условию: npHTp Tjj X, приТ-X Tp Vx, (2) 1+Л при То-Х„ Т., wVf ,afo - средняя частота полосы пропускания усилителя 6; Тр - период разностной частоты;2Хо - зона нечувствительности цифрового релейного элемента. До момента tj (фиг. 4а) период разностной частоты находится в зоне нечувствительности, при этом сигнал на выходе цифрового релейного элемента 14 отсутствует (фиг. 46). При. отклонении периода разностной частоты выше зоны нечувствительности от момента ti до t2, вследствие какого-либо возмущающего или дестабилизирующего фактора, например, ухода опорного аналогового сигнала или параметров модуляции из-за изменения окружающей температуры, цифровой релейный элемент 14 выдает на реверсивный счетчик 15 сигналы на вычитание, уменьшающие его число Npc (фиг. 4в). : (t ) N ( )+(t -t Vf К Рэ (3) Np, (t,j )- число в реверсивном счетчике до момента tj; ) число в реверсивном счетчике после момента t2; F - тактовая частота, поступающая на вход цифрового релейного элемента. версивный счетчик 15 управляет вторым ирующим преобразователем 16 по пряморциональному закону. рс.
где А
опорный аналоговый сигнал
on от источника 12.
Аналогично, в течение времени tj-ta, КОГ да период разностной частоты находится в зоне нечувствительности, сигнал на 1выходе второго декодирующего преобразователя 16 не меняется. В течение времени t4-tj, когда период разностной частоты становится ниже зоны нечувствительности, на реверсивный счетчик 15 выдаются импульсы на сложение, и ъыходной сигнал второго декодирующего преобразователя 16 увеличивается.
Скорость перестройки частоты передатчика 2 на текущем периоде измерения (пТ) равна
У(ПТ) (5)
где К V - постоянный коэффицент моду1
лятора. Или с учетом (1) и (5)
/х/ пти шИгЛеа f6V
t N CnT-T) W
Разностная частота Fp ни выходе усилителя 6 в текущий период измерения равна
г(nт).ЛM,
(7)
где fl(hT) - высота полета в текущий пери-э
од измерения. Или с учетом (6)
2Н(пТ)
Аоп-Ку
N
(8)
PC N(nT-T) С .
Так как в предложенном радиовысотомере результат вычисления счетчика-вычислителя 9 не зависит от У , то есть
N(nT-r)-m.2H(nT-TJ, (9)
где С - скорость света;
m - постоянный коэффициент, зависящий от числа измерительных интервалов в периоде измерения и частоты тактовых импульсов (для фиг.З т .2);
Н (пТ-Т) - высота полета в предьщущий период измерения, то
Aon-K -Npc ) р uf-C-m jg
, Соотношения Н(пТ) и Н{пТ-Т) связаны зависимостью
Н(иТ)Н(пТ-Т)ЙТ,(И)
ше Н - скорость изменения высоты.
Для предложенного радиовысотомера даже при скорости изменения высоты в несколько сотен метров в секутоду Н(пТ) отличается от Н(пТ-Т) не более чем на 2-3%. Поэтому выражение (10) может быть приведено к виДУ
в .ус
(12)
или, обозначая
ОП .
Д С-«1 О)
(13)
из анализа Fp Кр Npc (2), (3) и (13) видно, что при наличии возмущений или других дестабилизирующих факторов при увеличении (уменьщении) разностной частоты за зону нечувствительности контур обратной.,, связи, замыкающийся пространство, стремится уменьпшть (увеличить) частоту, тр. есть увеличивает устойчивость радаовысотомера.
В частном случае второй декодирующий
преобразователь 16 может быть включен между модулятором 1 и первьш декодируюишм преобразователем 13, который в этом случае подключается к источнику аналогового сигнала (не показан), Процессы управпения при этом не изменяются.
Применегше предложенного цифрового ЧМ радиовысотомера позволяет по сравнению с известным существенно повьюить чувствительность. Так в нем реализуется .узкополосный прием пр Ич полрсе пропускания приемника менее 10 кГц, в то время как для работы известного высотомера при том же диапазоне высот требуется приемник с полосой Пропускания до 300 кГц (частота модуляции зоб Гц, полоса модуляции 100 МГц, диапа.зон.высот 1000м).
Формула изобретения
f.J
