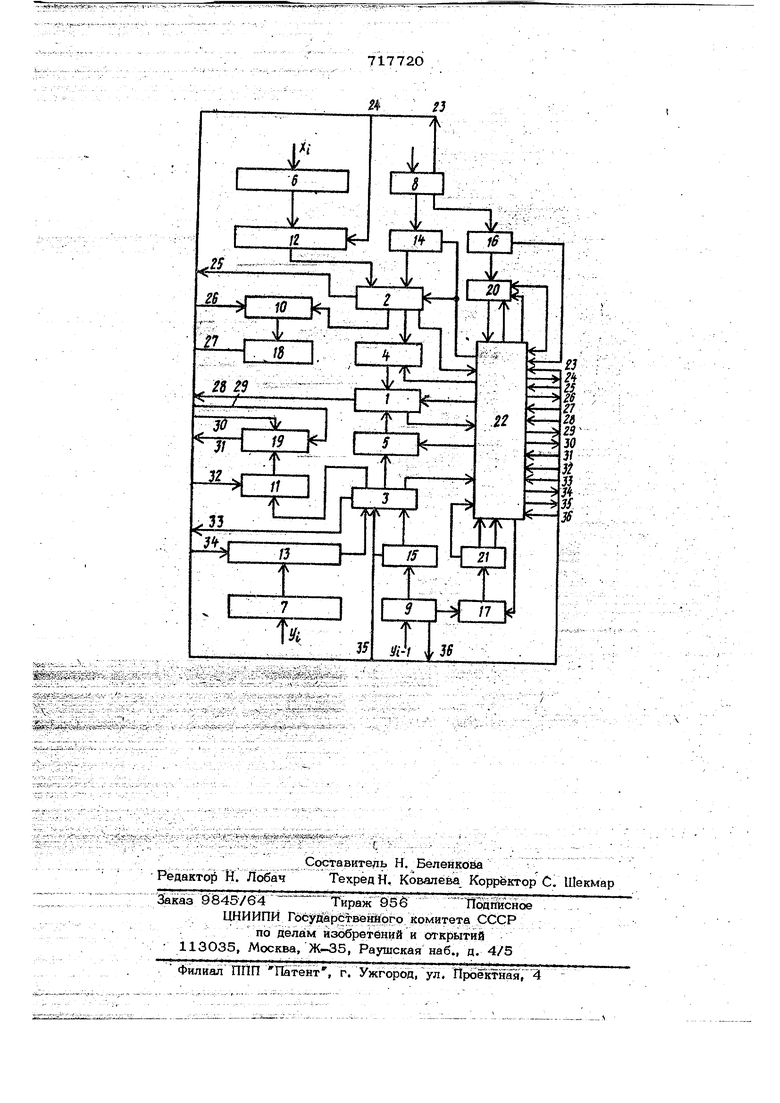
;: - -1 Изобретение относится к o6niacTH вычислительной техники и может бьггь испопьзоваНо в системах с програмкШым управлением для графического построения и визуального отображения информа.НИИ. , .;- .: Известе.н интерполятор, работающий по методу оценочной функции, предназна ченный ДЛЯ построения линий в виде тдельных близлежащих точек (ступенчатой линии), основным элементом которо го является сумматор оценочной функции И . Наиболее близким по технической суй ности к предложенному является линейный интерполятор, содержащий первый сумматор, подключенный первым входом к выходу блока управления, первы реве сивный cчeтчиk, первый вход кото|юго подкйючен к первому выходу первого бл ка вентилей, первый вход которого подсоединен к соответствующему выходу блока управления, и два координатных канала, каждый из которых состоит из последовательно соединенных первого регистра, втсфого блока вентилей в второго сумматора, второй вход которого через третий блок вентилей подключен ко второму регистру 5 Общим недостатком известных интер .1- - - . пол5ггоров явдяется недостаточная точность вследствие того, что они нозволя ют интерполировать только векторы с кратными шагу квантования величинами проекций. Ошибка интерполяции вектора, оцениваемая величиной наибольшего пер пендшкуляра от точки интерполирующей ЛИНИИ до вектора, в этих устройствах составляет .4,5h , в том числе ошибка округления ,5hl гдеУу нлаг квантования. - . ... Целью изобретения являётсй повьпые- ние точности интерполятора. Поставленная цель достигается тем, что линейный интерполятор содержит в каждом Координатном канале коммутатор, второй реверсивный счетчик и четвеуэтый блок вентилей, причем первый вход пер- ЕГОгЪ cyiawarbpa через коммугатор подключён к первому выходу второго сумма :тора71вй:.ро ШШ ЖШ р&| к первому входу первого блока вентилей вход второго реверсивного счет- HHka подключен через четвертый блок вентилей ко второму выходу второго регистра, соответствующие входы блока управлений подсоединены в каждом канале к выхддам пёрво го и второго ревёртсивного счетчиков, ко второму и т рёГвёйу выходам вт&рого сумматора, третьему выходу второго регист ра, а соответствующие выходы блока управле НИИ подключены Ко вторым входам первого сукШатора, первого, второго и четвертого блоков вентилей, к третьему входу второго сумматора, подсоединенному ко второму входу третьего .блока вентилей и ко второму и третьему входа первого И второго ре е рсивных счетчиКбв. БлОК схема интерполятора представ- лена на чертеже.. Интерполятор содержит первый сумма тор 1, вторые сумматоры 2 и 3, комму таторы 4 и 5, первые и вторые регистры 6, 7 и 8 9, первые и вторые блоки 10, 1.1 и 12, 13 вентилей, третьи и четвертые блоки 14, 15 и 16, 17 вен- тилей, первые и вторые рёверсивн)Ь1е сче чики 18, 19 и 20, 21 и блок 22 управ ления, имеющий вхОды и В1Йх6ды 23-36. Интерполятор работает следующим об разом. Интерполятор построен на принципе вычисления и использования нулевого, в o6uiieM случае исходного значения оценочной 4огнкции, зависящего от длин проекций вектора и смещения его начала. При интерполяции векторов с неквантованными длинами проекций исходное значение оценочной функции для i -гО вектора ломанной равна: ,.(н-2д)-ДУ;(-2лх.): ЗдесьДХ-| И дv - длины проекций V-rO вектора, ду; координаты начала i -го вектора относительно ближайшей узловой точки координатной сетки, т а. АХ. Х.-Х., влиж. целое AViHViT - у, вли. .ивАОе где(,Х; ,V,) и (Х;,, ,v,-« координаты i -ой и ( i - 1)-ой точек излома. Даннбе вьфажение с учетом изменения знаков входящих переменных в зависимости от угла наклона вектора служит основой для построения интерполятора. В первом такте происходит установка в исходное состояние блоков устройства, в том числе регистров 6-9, куда заносятся координаты начала и конца вектора. В следующем такте во вторые реверсивные счетчики 20 и 21 заносятся значения дробных частей координат начала вектора и вычисляются величины проекций вектора в сумматорах 2 и 3. За следующие два такта в сумматоре 1 вычисляется значение 0, - 0,54iLV{. (величины проекций сдвигаются в коммутаторах 4 и 5 на один разряд в сторону младших). В счетчики 18 и 19 зано«сятся значения целых частей соответствующих проекций. Если в знаковом разряде соответствующего координатного сумматора О, а в старшем разряде остатка - , к содержимому соответствующего счетчика прибавляется It ИВ дальнейшем он работает как вычй тающий, если наоборрт - вычитается 1, и он работает как прибавляющий. В следующем такте происходит вычитание содержимого сумматора 2, сдвинутого на ст -1 разрядов в сторону младших (п - число разрядов дробной части координат) из сумматора 1, и вычита- ние в счетчике 19, если в старшем разряде дробной части регистра 9 (выход 36) находится О, или прибавление - если Процесс повторяется до обнуления счетчика 21. : В следующие такты, до обнуления счетчика 20, аналогично происходит прибавление сдвинутого содержимого сумматора 2.. Далее (до обнуления счетчиков 18 и 19) работа интерполятора состоит в прибавлении в каждом такте или вычитании э зависимости от состояния знаковрго разряда сумматора 1 одной или другой проекции в соответствующем сумматоре, изменении состояния счетчика 18 или 19 и выдачи соответствующего единичного приращения по одной из координат. Связь выходов 25 и 33 знаковых разрядов сумматоров 2 и 3 с блоком управления, наличие реверсивного режима работы счетчиков 18 и 19 и шести режимов работы коммутаторов 4 и 5 5 без сдвига информации на входе при сдвиге на один и разряд в сторону младших в прямом и обратном кодах позволяет интерполировать векторм с любым наклоном. Технико-экономический эффект от использования данного изобретения заключается в повышении точности инторполирования за счет вычисления и занесения в сумматор некоторого исгсодногс) состоя ния зависящего от Величин X; ,ДУ( и требуемого смещения вектора ( дх , и д У; ) внутри дискретных градаций. Формула изобретения Линейный интерполятор, содержащий первый сумматор, подключенный перйым входом к выходу блока управления, первый реверсивный счетчик, первый вход которого подключен к первому выходу первого блока вентилей, первый вход которого подсоединен к соответствующему выходу блока управления, и два координатных канала, каждый из которых состоит из последовательно соединенных первого регистра, второго блока вентилей и второго сумматора, второй.вход которого через третий блок вентилей подключён ко второму регистру, от л ч а ю щи и с я тем, что, с целью повышения точности интерполятора, он со- 206 держит в каждом координатном канале коммутатор, второй реверсивный счегник и четвертый блок вентилей, причем первый вход первого сумматора через коммутатор подключен к первому выходу второго сумматора, второй выход которого подсоединен к первому входу первого блока вентилей, первый вход второго реверсивного счетчика подключен через четвертый блок вентилей ко второму выходу второго регистра, соответствующие . входы блока управления подсоединены в каждом канале к вькодам первого и второго реверсивного счетчиков, ко второму и третьему выходам второго cykiMaTopa, третьему выходу Bt oporo регистр)а, а соответствующие выходы блока управления подключены ко Вторым входам первого сумматора, пербо о, второго и четвёрToi b блоков вентилей, к третьему йходу второго сумматора, подсоединенному ко второму Входу третьего блока вентилей fi Кб BTopofvfy и третьему входам первого и Второго реверсивных счетчиков. Источники информации, принятые во внимание при экспертизе 1.Агурский М. С. ;и др. Числовоепрограммное управление станками. М., Машиностроение, 1966, с. 174-176. 2.Авторское свидетельство СССР № 401964, кл. QOS В 19/20, 1973 (прототип).
23
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой интерполятор | 1976 |
|
SU651317A1 |
| Круговой интерполятор | 1977 |
|
SU714356A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Линейный интерполятор | 1985 |
|
SU1298714A1 |
| Генератор векторов для системы отображения графической информации | 1974 |
|
SU525980A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейный интерполятор для систем интерактивной графики | 1988 |
|
SU1608691A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Устройство для вывода графической информации | 1978 |
|
SU752403A1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ КОРНЕВЫХ ГОДОГРАФОВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1973 |
|
SU397914A1 |
leewt -e,,
;; S Ri«tis 5
