Изобретение относится к технике автоматизированного управления производственными процессами и может быть использовано в системах числового программного управления станками.
Цель изобретения - упрощение интерполятора.
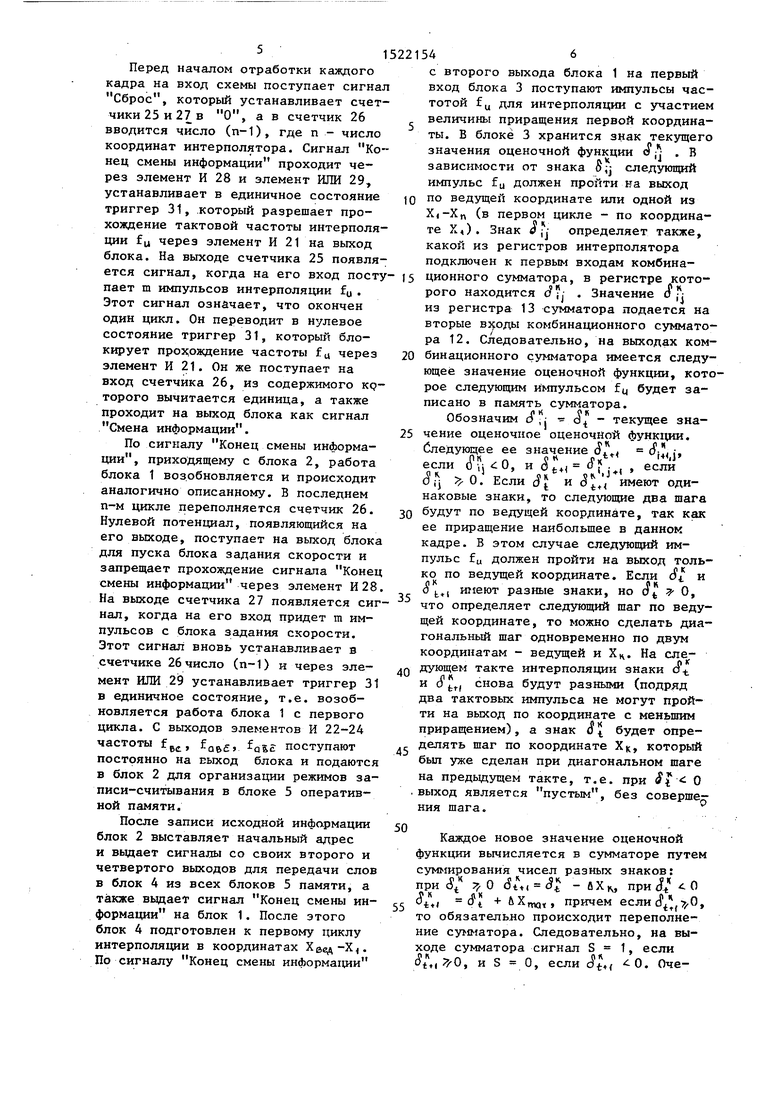
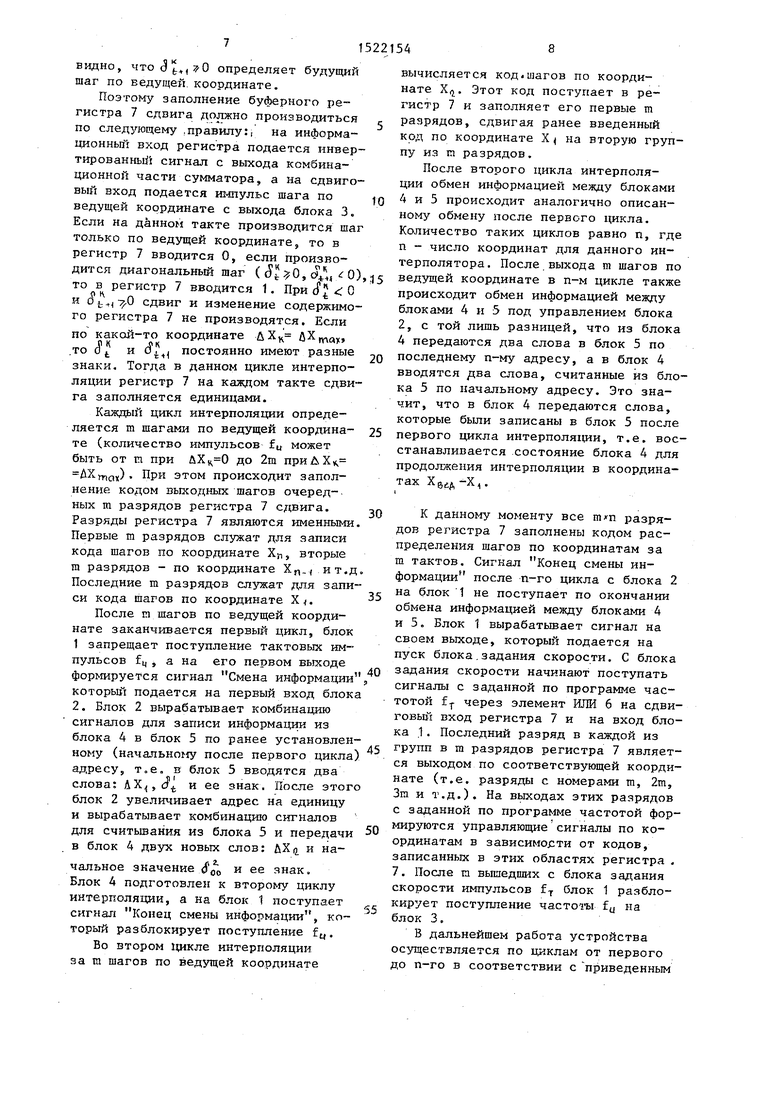
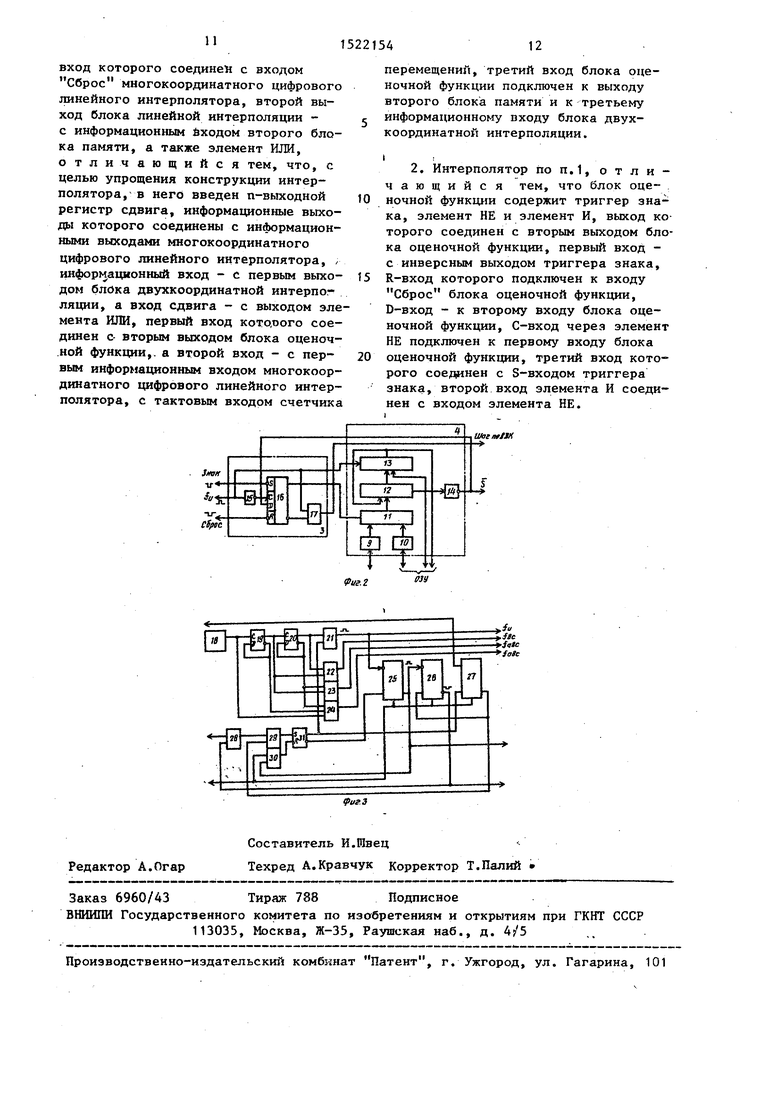
На фиг.1 представлена функциональная схема интерполятора; на Аиг.2 - схема блока оценочной функции; на фиг.З - схема блока управления интерполяцией.
Интерполятор содержит блок 1 управления интерполяцией, блок 2 управления обменом информацией, блок 3 оценочной функции, блок А двухкоорди натной интерполяции, два блока 5 па- .мяти, элемент ИЛИ 6, регистр 7 сдвиг и счетчик 8 перемещения.
Блок 4 двухкоординатной интерполяции образуют регистр 9 ведущей координаты, регистр 10 ведомой координаты, коммутатор 11 двух входов на один вьпсод, комбинационный сумматор 12, регистр 13 сугшатора и инвертор 14,
Блок 3 оценочной функции содержит инвертор 15, триггер 16 знака и элемент И 17.
Блок 1 управления интерполяцией включает генератор 18 импульсов, триггеры 19 и 20, элементы И 21-24, первьй счетчик 25 тактов, счетчик 26 циклов, второй счетчик 27 тактов, элемент И 28, элементы ИЛИ 29 и 30 и RS-триггер 31.
Линейная интерполяция в координатах Х, Х,, ...,Х ведется в ускоренном масштабе времени по циклам в одном блоке 4. В первом цикле осуществляется интерполяция в плоскостях ведущая координата - Х4, во втором цикле - ведущая - Хгг, в п-м цикле - ведущая - Х, где каждый цикл состоит из m тактов интерполяции. Для ведущей координаты принимается то из приращений Х(, Х5,...,Х„, которое в данном кадре является наибольшим, т.е. йХ(. Физическо привязки ведущей координаты к какой либо из координат Хд, не
требуется. При интерполяции в каждой из интерполируемых плоскостей используется оценочная функция
cf,
-ЛХ«. Хбе(ц,
где
irvan
Х,
X
максимальное значение из совокупности ЛХ,, fiXj,... ,. .., Ьл
приращение по координате Х в данном кадре; текущее значение координаты Х после совершения i шагов вдоль интерполируемого отрезка от начальной его точки, причем начало отрезка находится
в начале координат, т.е.
Y -Y° - . л. -л.1 -..,-л„-и.
X
аед - текущее значение ведущей координаты после совершения j шагов интерполяции; как и для других координат .
Прямая делит координатную плоскость в координатах Хвед-Хц на две части, в одной из которых .; 0, в
Ok
другой Ojj -iO, а если текущая точка отработки находится на самой прямой, то 0. Если (ij О, то делается .шаг по ведущей координате и вычисляется новое значение оценочной функции , 5 fj -&XK. Если (jl ч О, то делается шаг по координате X ц с вычислением
C,i и
moji
5
0
5
0
5
Знак оценочной функции однозначно указьшает, по выходу какой из координат должен выйти следующий шаг, а очередное значение оценочной функции вычисляется путем простых арифметических операций с использованием приведенных рекуррентных соотношений.
С поступлением сигнала Сброс на второй вход блока 2 последний выдает необходимую комбинацию сигналов по записи исходной информа19 и для интерполяции из блока программы (не показан) в блок 5. Адрес подается на третьи входы всех блоков 5, сигнал Выборка - на вторые входы блока 5, сигнал Запись - на первые входы блока 5. По начгшьному адресу в первый блок 5 вводится лриращение ЛХ, во второй блок 5 - начальное значение оценочной функции (р О и ее знак. После каждой записи адрес увеличивается на единицу. По последнему адресу в первый.блок 5 вводится ЬХ, во второй блок 5 - OQ О и ее знак. Величина , непосредственно вводится в регистр 9.
Перед началом отработки каждого кадра на вход схемы поступает сигнал Сброс, который устанавливает счетчики 25 и 27 в О, а в счетчик 26 вводится число (п-1), где п - число координат интерполятора. Сигнал Конец смены информации проходит через элемент И 28 и элемент ИЛИ 29, устанавливает в единичное состояние триггер 31, который разрешает прохождение тактовой частоты интерполяции fu через элемент И 21 на выход блока. На выходе счетчика 25 появля
с второго выхода блока 1 на первый вход блока 3 поступают импульсы частотой ц для интерполяции с участием величины приращения первой координаты. В блоке 3 хранится знак текущего значения оценочной функции о jj .В зависимости от знака следующий импульс fu должен пройти на выход по ведущей координате или одной из Х|-Хп (в первом цикле - по координате X,). Знак of: определяет также, какой из регистров интерполятора подключен к первым входам комбина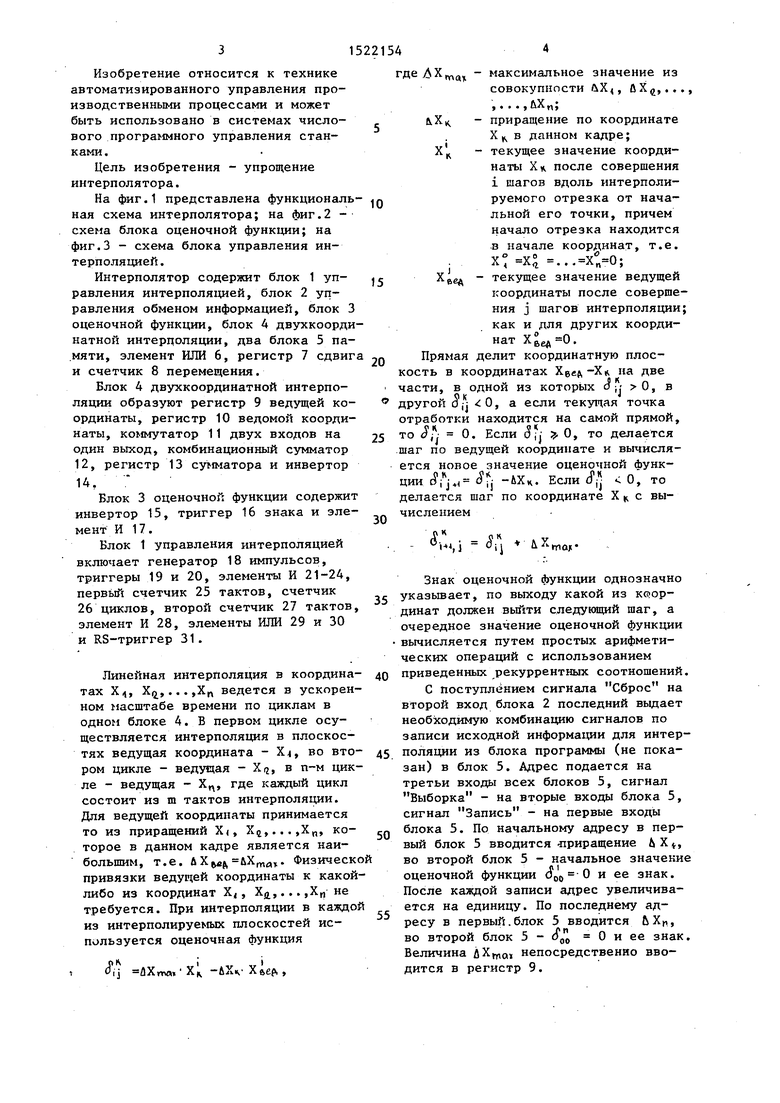
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Многокоординатный цифровой интерполятор | 1984 |
|
SU1200246A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Линейный интерполятор | 1991 |
|
SU1809421A1 |
| Линейный интерполятор | 1986 |
|
SU1413603A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1693592A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Линейный интерполятор | 1987 |
|
SU1439534A1 |
Изобретение относится к технике автоматизированного управления производственными процессами и может быть использовано в системах числового программного управления станками. Цель изобретения - упрощение конструкции. Интерполятор содержит блок 1 управления интерполяцией, блок 2 управления обменом информации, блок 3 оценочной функции, блок 4 двухкоординатной линейной интерполяции, два блока 5 памяти, элемент ИЛИ 6, сдвиговый регистр 7, счетчик 8 перемещения. Интерполяция производится на максимально возможной частоте по циклам в координатах ведущая - ведомая с запоминанием распределения шагов цикла в блоке памяти в виде одного N - выходного регистра сдвига. 1 з.п. ф-лы, 3 ил.
ется сигнал, когда на его вход посту- 15 ционного сумматора, в регистре кото- пает m импульсов интерполяции fu . рого находится J, . Значение о -j Этот сигнал означает, что окончен из регистра 13 сумматора подается на один цикл. Он переводит в нулевое вторые входы комбинационного суммато- состояние триггер 31, который бло- ра 12. Следовательно, на выходах ком20 бинационного сумматора имеется следующее значение оценочной функции, которое следующим импульсом fy будет записано в память сумматора.
Обозначим с f; - S - текущее зна- 25 чение оценочное оценочной функ1№1И.
кирует прохождение частоты f через элемент И 21. Он же поступает на вход счетчика 26, из содержимого KQ- торого вычитается единица, а также проходит на выход блока как сигнал Смена информации.
По сигналу Конец смены информации, приходящему с блока 2, работа блока 1 возобновляется и происходит аналогично описанному. В последнем п-м цикле переполняется счетчик 26. Нулевой потенциал, появляющийся на его выходе, поступает на выход блока для пуска блока задания скорости и запрещает прохождение сигнала Конец смены информации через элемент И 28.
f к °t+M.
Следующее ее значение (J i-nj. если (, и (( .j Sf 0. Если JJ и S имеют одинаковые знаки, то следующие два шага 30 будут по ведущей координате, так как ее приращение наибольщее в данном кадре. В этом случае следующий импульс fu должен пройти на выход только по ведзпцей координате. Если с и 5 ,, ипеют разные знаки, но о О,
На выходе счетчика 27 появляется сиг- что определяет следующий шаг по веду
нал, когда на его вход придет m импульсов с блока задания скорости. Этот сигнал вновь устанавливает в счетчике 26 число (п-1) и через элемент ИЛИ 29 устанавливает триггер 31 в единичное состояние, т.е. возобновляется работа блока 1 с первого цикла. С выходов элементов И 22-24 частоты fp, f.af,E, fqsc поступают постоянно на выход блока и подаются в блок 2 для организации режимов записи-считывания в блоке 5 оперативной памяти.
После записи исходной информации блок 2 выставляет начальный адрес и вьщает сигналы со своих второго и четвертого выходов для передачи слов в блок 4 из всех блоков 5 памяти, а также вьщает сигнал Конец смены ин- формации на блок 1. После этого блок 4 подготовлен к первому циклу интерполяции в координатах . По сигналу Конец смены информахщи
Обозначим с f; - S - текущее зна- 5 чение оценочное оценочной функ1№1И.
f к °t+M.
Следующее ее значение (J i-nj. если (, и (( .j Sf 0. Если JJ и S имеют одинаковые знаки, то следующие два шага 0 будут по ведущей координате, так как ее приращение наибольщее в данном кадре. В этом случае следующий импульс fu должен пройти на выход только по ведзпцей координате. Если с и 5 ,, ипеют разные знаки, но о О,
что определяет следующий шаг по веду0
5
щей координате, то можно сделать диагональный щаг одновременно по двум координатам - ведущей и Хк. На дующем такте интерполяции знаки о и (1 снова будут разными (подряд два тактовых импульса не могут пройти на выход по координате с меньшим приращением), а знак 0 будет определять шаг по координате Х, который бьш уже сделан при диагональном шаге на предыдущем такте, т.е. при S О выход является пустым, без совершения шага.
Каждое новое значение оценочной функции вычисляется в сумматоре путем суммирования чисел разных знаков: при S 7f О (St., BI - аХк, при (Jt О L +&Xr,, причем если d,, то обязательно происходит переполнение сумматора. Следовательно, на выходе сумматора сигнал , если (Д(0, и S О, если
71522154
видно, 4TO(3t+, определяет будущий шаг по ведущей, координате.
Поэтому заполнение буферного регистра 7 сдвига должно производиться по следующего .правилу:, на информа- ционньй вход регистра подается инвертированный сигнал с выхода комбинационной части сумматора, а на сдвиговый вход подается ш-шульс шага по ведущей координате с выхода блока 3. Если на данном такте производится шаг только по ведущей координате, то в регистр 7 вводится О, если произво8
10
вычисляется код.шагов по координате Х. Этот код поступает в регистр 7 и заполняет его первые m разрядов, сдвигая ранее введенный код по координате X на вторую группу из и разрядов.
После второго цикла интерполяции обмен информацией между блоками 4 и 5 происходит аналогично описанному обмену после первого цикла. Количество таких циклов равно п, где п - число координат для данного интерполятора. После выхода m шагов по
дится диагональный шаг ( Jt 0, J/, : 0), ;j5 ведущей координате в п-м цикле также
то в регистр 7 вводится 1, При О и 0|., сдвиг и изменение содержимого регистра 7 не производятся. Если по какой-то координате ДХ , .то t и Sl постоянно имеют разные знаки. Тогда в данном цикле интерполяции регистр 7 на каждом такте сдвига заполняется единицами.
Каждый цикл интерполяции определяется m шагами по ведущей координате (количество импульсов ц может быть от m при до 2т приЛХ,( AXmai{) При этом происходит заполнение кодом выходных шагов очередных m разрядов регистра 7 сдвига. Разряды регистра 7 являются именными. Первые m разрядов служат для записи кода шагов по координате Хл, вторые m разрядов - по координате Х,,., ит.д. Последние m разрядов служат для записи кода шагов по координате Х,
После п шагов по ведущей координате заканчивается первый цикл, блок 1 запрещает поступление тактовых импульсов fц, а на его первом выходе
20
25
30
35
происходит обмен информацией между блоками 4 и 5 под управлением блока 2, с той лишь разницей, что из блока 4 передаются два слова в блок 5 по последнему п-му адресу, а в блок 4 вводятся р,ва слова, считанные из бло ка 5 по начальному адресу. Это значит, что в блок 4 передаются слова, которые были записаны в блок 5 после первого цикла интерполяции, т.е. вос станавливается состояние блока 4 для продолжения интерполяции в координатах Хбйд-Х.
I
К данному моменту все разрядов регистра 7 заполнены кодом распределения шагов по координатам за m тактов. Сигнал Конец смены информации после п-го цикла с блока 2 на блок 1 не поступает по окончании обмена информацией между блоками 4 и 5. Блок 1 вырабатывает сигнал на своем выходе, который подается на пуск блока,задания скорости. С блока
.. -ц , „ - - , .- Q задания скорости начинают поступать
формируется сигнал Смена информации „
сигналы с заданной по программе частотой f-f через элемент ИЛИ 6 на сдви roBbrii вход регистра 7 и на вход бло ка 1. Последний разряд в каждой из групп в m разрядов регистра 7 являет ся выходом по соответствующей коорди нате (т.е. разряды с номерами га, 2т, 3т и т.д.). На выходах этих разрядов с заданной по программе частотой фор мируются управляющие сигналы по координатам в зависимости от кодов, записанных в этих областях регистра . 7. После m вышедших с блока задания скорости импульсов fj блок 1 разблокирует поступление частоэъг ц на блок 3.
которьй подается на первый вход блока 2. Блок 2 вырабатывает комбинацию сигналов для записи информации из блока 4 в блок 5 по ранее установленному (начальному после первого цикла) адресу, т.е. в блок 5 вводятся два слова: ДХ, и ее знак. После этого блок 2 увеличивает адрес на единицу и вырабатывает комбинацию сигналов для считьшания из блока 5 и передачи в блок 4 двух новых слов: ДХ( и начальное значение fjfo и ее знак. Блок 4 подготовлен к второму циклу интерполяции, а на блок 1 поступает сигнал Конец смены информации, который разблокирует поступление fц.
Во втором 1щкле интерполяции за та шагов по ведущей координате
8
вычисляется код.шагов по координате Х. Этот код поступает в регистр 7 и заполняет его первые m разрядов, сдвигая ранее введенный код по координате X на вторую группу из и разрядов.
После второго цикла интерполяции обмен информацией между блоками 4 и 5 происходит аналогично описанному обмену после первого цикла. Количество таких циклов равно п, где п - число координат для данного интерполятора. После выхода m шагов по
ведущей координате в п-м цикле также
0
5
0
5
происходит обмен информацией между блоками 4 и 5 под управлением блока 2, с той лишь разницей, что из блока 4 передаются два слова в блок 5 по последнему п-му адресу, а в блок 4 вводятся р,ва слова, считанные из блока 5 по начальному адресу. Это значит, что в блок 4 передаются слова, которые были записаны в блок 5 после первого цикла интерполяции, т.е. восстанавливается состояние блока 4 для продолжения интерполяции в координатах Хбйд-Х.
I
К данному моменту все разрядов регистра 7 заполнены кодом распределения шагов по координатам за m тактов. Сигнал Конец смены информации после п-го цикла с блока 2 на блок 1 не поступает по окончании обмена информацией между блоками 4 и 5. Блок 1 вырабатывает сигнал на своем выходе, который подается на пуск блока,задания скорости. С блока
0
5
сигналы с заданной по программе частотой f-f через элемент ИЛИ 6 на сдви- roBbrii вход регистра 7 и на вход блока 1. Последний разряд в каждой из групп в m разрядов регистра 7 является выходом по соответствующей координате (т.е. разряды с номерами га, 2т, 3т и т.д.). На выходах этих разрядов с заданной по программе частотой формируются управляющие сигналы по координатам в зависимости от кодов, записанных в этих областях регистра . 7. После m вышедших с блока задания скорости импульсов fj блок 1 разблокирует поступление частоэъг ц на блок 3.
В дальнейшем работа устройства осуществляется по циклам от первого до п-го в соответствии с приведенным
91
описанием. Но все п циклов интерполяции должны производиться за время, меньшее периода следования сигналов f- с блока задания скорости. В счетчик 8, который работает на вычитание перец началом отработки участка вводится величина Каждый импульс ff поступает на вход счетчика 8. Сигнал переполнения счетчика 8 свидетельствует об окончании интерполяции .
Максимальная подача, которую может обеспечить устройство, пропорциональна частоте на выходе блока зада ния скорости:,
,, 60 f ьэй та h у
гд.е ffejcrriM максимальная частота на выходе блока задани скорости;
h - величина единичного шага интерполяции, мм, соответствующая одному импульсу с выхода блок задания скорости. В предлагаемом устройстве должно
выполняться условие Т . Я®
tu, - время одного цикла интерполяции
Если ( О, то триггер 16 находится в нулевом состоянии, если с : О- в единичном. При 0 импульс интерполяции проходит через элемент И 17 на выход по ведущей координате. По входу С задним фронтом этого импульс в триггер 16 записьшается знак оценочной функции S , значение которого подается на вход D триггера 16 в виде инверсного сигнала переполне- ния комбинационного сумматора 12.
Выход триггера 16 управляет коммутатором 11 двух входов на один выход, который, таким образом, в зависимости от знака с подключает к ком- бинационному сумматору 12 либо регистр ведущей координаты 9, либо регистр координаты XK, причем число из регистра 9 передается в прямом коде, из регистра 10 - в дополнитель ном. На второй вход сумматора 12 подается текущее значение оценочной функции с( как в прямом коде при , так и в дополнительном при ( 0. Таким образом, на входах сум матера 12 одно слагаемое представлен всегда в прямом коде, другое - в дополнительном. Если результат суммирования положителен, то происходит пе
10
5
Q
0
0
5 0
5 0 е
реполнение сумматора, т.е. если , то S 1, и наоборот, если (Si(0, то S 0. Таким образом, инверсное значение сигнала переполнения комбинационного сумматора 12 S будет представлять знак с,4 . Одновременно с записью знака d i«f в триггер 16 этим же импульсом fц значение (Jt-K записьгаается в регистр 13 сумматора.
Блоки 1 и 2 аналогичны представленным в прототипе, за исключением того, что число (п-1) - 1, вводимое в блок 1 для изменения количества циклов интерполяции, в данной схеме является постоянным и ввода этой величины не требуется.
Формула изобретения
вход которого соединен с входом Сброс многокоординатного цифрового линейного интерполятора, второй выход блока линейной интерполяции - с информационным йходом второго блока памяти, а также элемент ИЛИ, отличающийся тем, что, с целью упрощения конструкции интерполятора, в него введен п-выходной регистр сдвига, информационные выходы которого соединены с информационными выходами многокоординатного цифрового линейного интерполятора, . информационный вход - с первым выходом блока двухкоординатной интерпо,- ляции, а вход сдвига - с выходом элемента ИЛИ, первый вход кото.оого соединен с- вторым выходом блока оценоч- .ной функции,, а второй вход - с первым информационным входом многокоординатного цифрового линейного интерполятора, с тактовым входом счетчика
Фиг. г
Фиг.Э
перемещений, третий вход блока оценочной функции подключен к выходу второго блока памяти и к третьему информационному входу блока двухкоординатной интерполяции.
I:
ночной функции содержит триггер знака, элемент НЕ и элемент И, выход ко торого соединен с вторым выходом блока оценочной функции, первый вход - с инверсным выходом триггера знака,
R-вход которого подключен к входу Сброс блока оценочной функции, D-вход - к второму входу блока оценочной функции, С-вход черея элемент НЕ подключен к первому входу блока
оценочной функции, третий вход которого соединен с S-входом триггера знака, второй вход элемента И соединен с входом элемента НЕ.
WatoftK
ffjy
ffc ffvtc
iaic
| Многокоординатный цифровой интерполятор | 1981 |
|
SU966665A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
