{54) КРУГОВОЙ ИНТЕРПОЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный интерполятор | 1977 |
|
SU717720A1 |
| Линейный интерполятор | 1987 |
|
SU1439532A1 |
| Цифровой интерполятор | 1976 |
|
SU651317A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1693592A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Линейный интерполятор | 1988 |
|
SU1522157A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| Линейный интерполятор | 1985 |
|
SU1298714A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
1
Изобретение относится к области вычислительной техники и может быть использовано в системах программного управления и построителях графической информации.
Известен интерполятор iji работающий по методу оценочной функции и содержащий сумматор, координатные регистры, блок управления и блоки вентиглей..
Недостатком такого интерполятора являются ограниченные функциональные возможности.
Наиболее близким техническим решением к изобретению является круговой интерполятор, содержащий сумматор оценочной функции, выход и первый вход которого подключены соответственно к первому входу и первому выходу блока управления, а второй вход - к выходу первого блока вентилей, соединенногр первым входом с выходом первого координатного регистра, вход которого и второ вход первого блока вентилей подключены
ко второму выходу блока управления, и второй координатный регистр 2J.
Такой интерполятор аппроксимирует окружность ступенчатой линией, состоящей из единичных приращений по направлениям осей координат.
Точность работы такого интерполятора недостаточна.
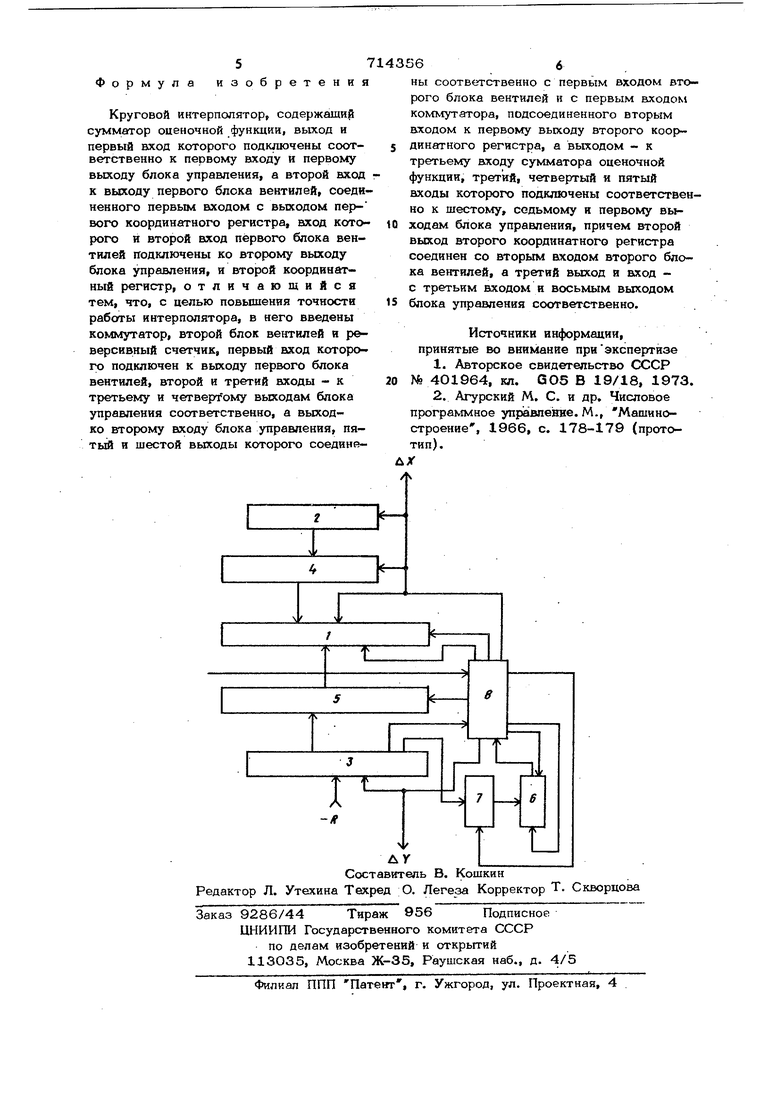
Цель изобретения - повышение точности работы интерполятора - достигается тем, что в него введены коммутатор, второй блок.вентилей и реверсивный счетчик. Первый вход счетчика подключен к выходу первого блока вентилей, второй и третий входы - к третьему и четвертому выходам блока управления соответственно, а выход - ко BTOp6Nty входу блока управления. Пятый и шестой выходы блока управления соединены соответственно с первым входом второго блока вентилей и с первым входом коммутатора, подсоегдиненного вторым входом к первому выходу второго координатного регистра, а Ьыходом - к третьему входу сумматора оценочной функции, третий, четвертый н пятый входь KCiTOporo подключены соответственно к шестому, седьмому и перв му выходам блока упраапения. Второй в хрд второго координатного регистра сое динен с вторым входом второго блока а третий выход и вход с третьим входом и воськтым выходом бло ка управления соответственно Интерполятор аппроксимирует окружность с произвольным, не обязательно -кратным шагу квантования, радиусом, что позволяет уменьшить оп1ибку интерполяции за счет округления Точность аппроксимадич заданной окружности повышена за счет вычисления оценочной функции в системе координат, смещенной относительно системыэ в которой строит ся аппроксимирующая линия. Если обозн чим 15 - заданный (неквантованный) радиус окружности, э (Jj ближайшее квантованное значение, то смешение по осям составит соответственно - (0,5 + &12)Vl и (О,3 -дТ2)Н , где шаг . квантования, а. & R К- Сделав необходимые преобразования и допустимые упрощения, получим что при шаге по первой оси Y оценоч 1ая функция U;7rrUjr2 -2j9 при шаге по вт i«ji 13 1. .-. х . рой оси , где j - чис по шагов по оси у , чисзю шагов .по оси Х, а начальное значение оценочной фувй ции UQ наиболее просто вычисляется н точке на одной из осей На чертеже представлена структурна схема кругового интерполятора. Он содержит сумматор оценочной функции it первый 2 и второй 3 координатные регистры, первый блок вентилей 4j коммутатор 5, реверсивный счет чик 6s второй блок вентилей 7 и блок управления S« Интерполятор работает следующим образом, В исходном состоянии в регистр 3 занесено отрицательное значение радиуса - 15. (в дополнительном коде), сумматор Is регистр 2 к гчетчик 6 находя ся в нулевом состоянии В первом такте с выхода регистра 3 на счетчик 6 заносится значение . д в сумматор 1 с вьгхода регистра б заносится содержимое остальных разрядов и, если в старшем разряде -.Д. (на третьем выходе регистра 3) находится нуль, из сумматора 1 по четвертому входу вычитается единица из (П + 1) -го разряда, где - число разрядов Т. Таким образом заносится значение - (fk, В следующем такте прибавляется, если в старшем разряде - лР сумматора 1 находится единица, или вычитается если - нуль-содержимое регистра 3, сдвинуто в сторону младши-х разрядов на ( VI 1) разряд (BbRHTaHHe производится прибавлением инвертированного содержимого регистра 3 к содержимому сумматора 1 и добавлением единицы в его младший разряд - на первый вход). Одновременно производится прибавление единицы в счетчик 6,если в старшем разряде Д1 находится единица, или вычитание, если там находится нуль. Аналогичные такты повторяются до обнуления счетчика 6. Зателг в каждом такте при единице в а наковом разряде сумматора 1 происходит прибавление содержимого регистра 2, сдвину-: о на один разряд в сторону старшах (т.е. умноженного на два) к содержимому суммш-ора 1, прибавление единицы в младший разряд регистра 2 в ())--/ разряд сумматора 1 (на пятый вхо;. л вьшача сигнала единичного приращенйя по оси X. При нуле в знаковом разряде сумматора 1 происходит прибавление содержимого регистра 3, сдвинутого на один разряд в сторону старших разрядов, прибавление единицы в (П+1)-й разряд регистра 3 и (И+ 2)-и разряд сумматора 1 и выдача сигнала единичного приращения по оси Y . При прибавлении удвоенного значения содержимого регистра 3 к содержимому сумматора 1 на его ( П + 1) младшие разряды с коммутатора 5 подаются единицы. Выше описана работа интерполятора по упрощенной оценочной функции, однако, при необходимости он может работать по оценочной функции, полученной в общем виде. Точность работы предложенного интерполятора повышена. Ошибка интерполяции в общем случае не превышает величины}nf2( 1+1/2 )/2, причем повышение точности достигается без Уменьшения шага интерполяции, которое связано с резким снижением быстродействия. При аппроксимации окружности с квантованным радиусом ошибка интерполяции не превьш:ает величины 11/2/2 и является минимально возможнон.
Формула изобретения
Круговой интерполятор, содержашир сумматор оценочной функции, выход и первый вход которого подключены соответственно к первому входу и первому выходу блока управления, а второй вход к выходу первого блока вентилей, соединенного первым входом с выходом пер-° вого координатного регистра, вход которого и второй вход первого блока вентилей подключены ко второму выходу блока управления, и второй координатный регистр, отличающийся тем, что, с целью повышения точности работы интерполятора, в него введены коммутатор, второй блок вентилей и реверсив;ный счетчик, первый вход которого подключен к выходу первого блока вентилей, второй и третий входы - к третьему и четвертому выходам блока управления соответственно, а выходко второму входу блока управления, пятьй и шестой выходы которого соединевы соответственно с первым входом второго блока вентилей и с первым входом коммутатора, подсоединенного вторым входом к первому выходу второго коо{ динатного регистра, а выходом - к третьему входу сумматора оценочной функции, третий, четвертый и пятый входы которого подключены соответственно к шестому, седьмому и первому выходам блока управления, причем второй выход второго координатного регистра соединен со вторым входом второго блока вентилей, а третий выход и вход с третьим входом и восьмым выходом блока управления соответственно.
Источники информации, принятые во внимание приэкспертизе
20 № 401964, кл. QO5 В 19/18, 1973.
ДДГ
