В целях получения полного представления о количестве производимых движений и их характере при разрабатывании тугоподвижных суставов больным на существующих механотерапевтических устройствах для активной и пассивной гимнастики предлагается присоединяемый к последним аппарат с угломером, псхазывающим амплитуду движения. Аппарат снабжен счетчиками количества движений и писчиком, НЁНОсящим кривую амплитуд на бумагу, закрепленную на вращающемся барабане.
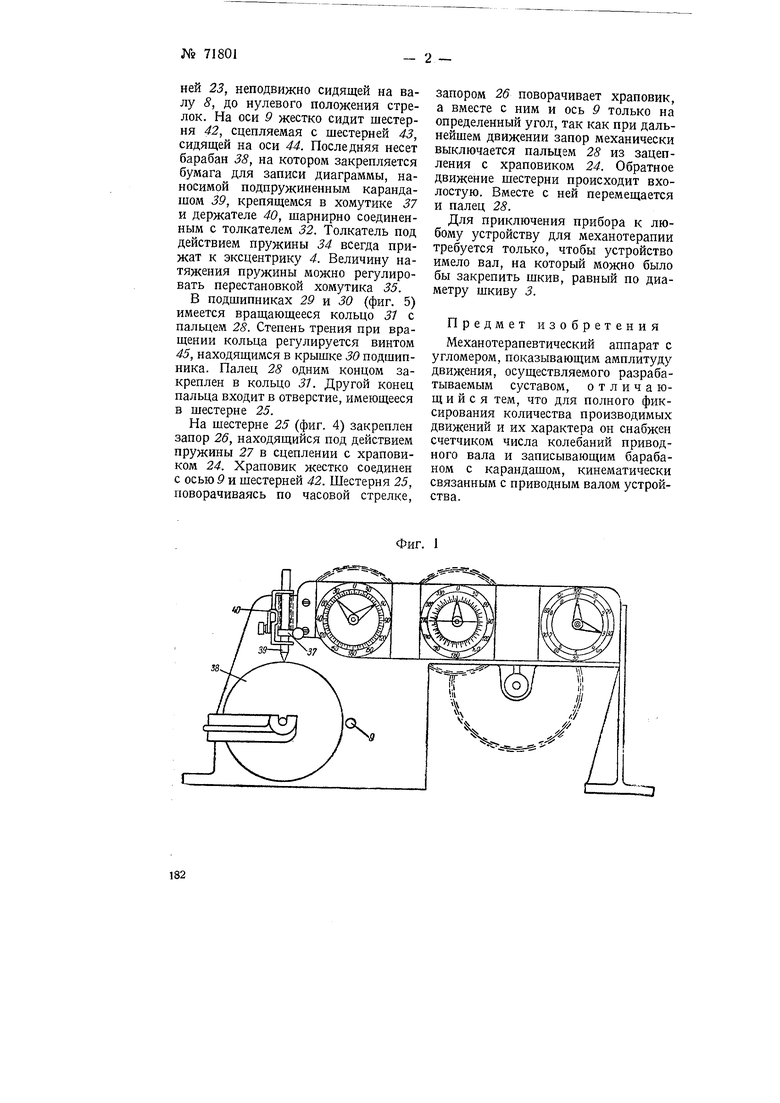
На фиг. 1, 2 и 3 схематически изображен вид аппарата спереди, сверху и сбоку, на фиг. 4 - ось 9 аппарата с храповым устройством, на фиг. 5-концевое крепление оси 9.
Аппарат устроен следующим образом. Шкив 3, жестко закрепленный на валу 2, приводится в движение от шкива механотерапевтического устгойства, на котором больной выполняет врачебную гимнастику (устройство на чертеже не показано). На валу 2 имеются эксцентрик 4, шестерня 5 и крючок 6, вращающийся с валом 2 и передвигающий стрелки аппарата, показывающего амплитуды движений. Эксцентрик 4 по угломеру 7 устанавливается относительно оси вала так, чтобы получить на барабане 38 кривую в желательном масштабе.
Шестерня 5 сцепляется с шестерней 22 и передает движение на счетную часть аппарата. посредством запора 70, взаимодействующего с храповиком 77, ось 8 которого несет стрелку, показывающую на циферблате неполные обороты в градусах.
На оси 8 жестко посажена шестерня 72, взаимодействующая через промежуточные шестерни, имеющиеся на оси 73, с. шестернями, сидящими на оси J4, снабженная стрелкой, показывающей полные обороты вала 2. Шестерня 72 через шестерню 75 и двойные шестерни 76 и 77 взаимодействует с шестерней 18, к втулке 79 которой прикреплена стрелка, показывающая десятки оборотов. Зная длину разрабатываемой конечности и вес груза, употребляемого для ее разработки, по показателям циферблата можно подсчитать совершенную больным работу. После окончания гимнастики запор 70 откидывают и при помощи ручки 27 поворачивают шестерню 20, сцепленную с шестер181
ней 23, неподвижно сидящей на валу 8, до нулевого положения стрелок. На оси 9 жестко сидит шестерня 42, сцепляемая с шестерней 43, сидящей на оси 44. Последняя несет барабан 38, на котором закрепляется бумага для записи диаграммы, наносимой подпружиненным карандашом 39, крепящемся в хомутике 37 и держателе 40, шарнирно соединенным с толкателем 32. Толкатель под действием пружины 34 всегда прижат к эксцентрику 4. Величину натяжения пружины можно регулировать перестановкой хомутика 35.
В подшипниках 29 и 30 (фиг. 5) имеется вращающееся кольцо 31 с пальцем 28. Степень трения при вращении кольца регулируется винтом 45, находящимся в крышке 30 подшипника. Палец 28 одним концом закреплен в кольцо 31. Другой конец пальца входит в отверстие, имеющееся в шестерне 25.
На шестерне 25 (фиг. 4) закреплен запор 26, находящийся под действием пружины 27 в сцеплении с храповиком 24. Храповик жестко соединен с осью 9 и шестерней 42. Шестерня 25, поворачиваясь по часовой стрелке.
запором 26 поворачивает храповик, а вместе с ним и ось 9 только на определенный угол, так как при дальнейшем движении запор механически выключается пальцем 28 из зацепления с храповиком 24. Обратное движение шестерни происходит вхолостую. Вместе с ней перемещается и палец 28.
Для приключения прибора к любому устройству для механотерапии требуется только, чтобы устройство имело вал, на который можно было бы закрепить шкив, равный по диаметру шкиву 3.
Предмет изобретения
Механотерапевтический аппарат с угломером, показывающим амплитуду движения, осуществляемого разрабатываемым суставом, отличающийся тем, что для полного фиксирования количества производимых движений и их характера он снабжен счетчиком числа колебаний приводного вала и записывающим барабаном с карандашом, кинематически связанным с приводным валом устройства.
Фиг. 1
Фиг. 2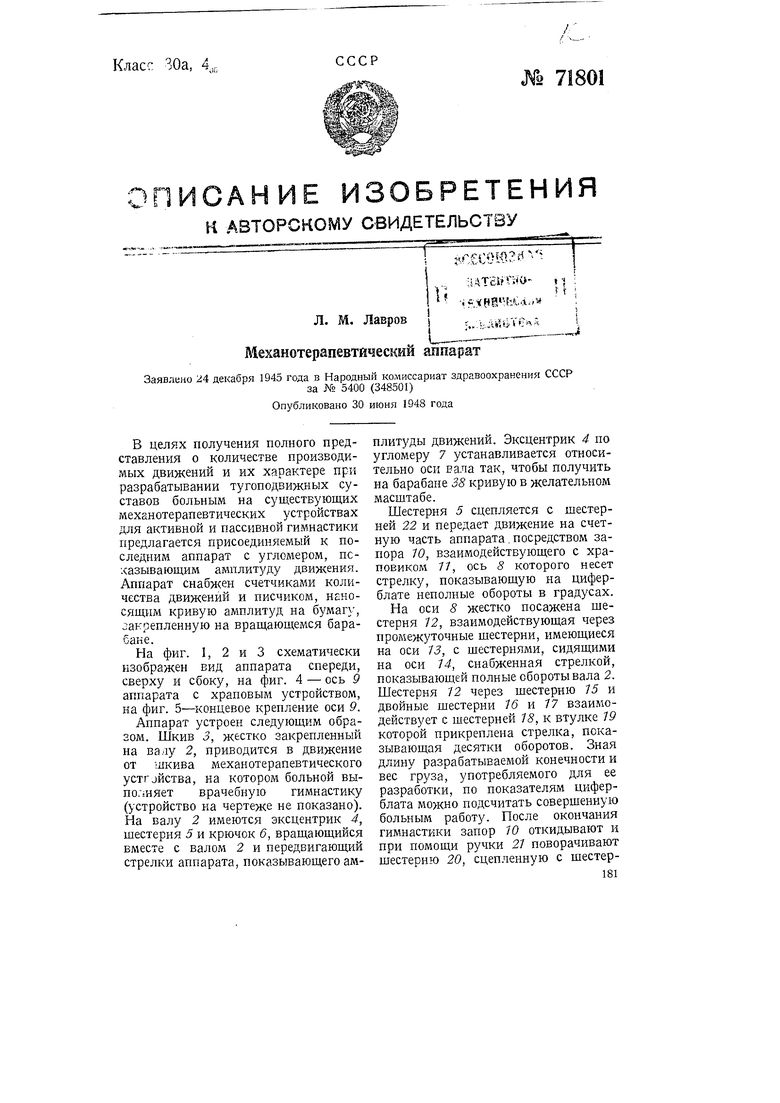

Фиг. 4
гз-
