В предлагаемом колесном тракторе несколько (три и более) свободно сидящих на своих осях колес, расположенных по окружности, помещены на концах расположенной горизонтально крестовины, вращающейся на вертикальной оси и получающей вращение от мотора. Плоскость вращения каждого колеса (подобно передним колесам автомобиля) автоматически может становиться под некоторым углом в ту или иную стороны, благодаря особому эксцентриковому механизму, регулируемому от руки. При вращении крестовины, в зависимости от угла поворота оси каждого колеса к направлению движения, передние колеса забегают вперед от окружности вращения крестовины и тянут трактор вперед, задние же колеса забегают внутрь окружности крестовины и отталкивают трактор в том же направлении (каждое колесо по мере вращения крестовины становится то передним, то задним).
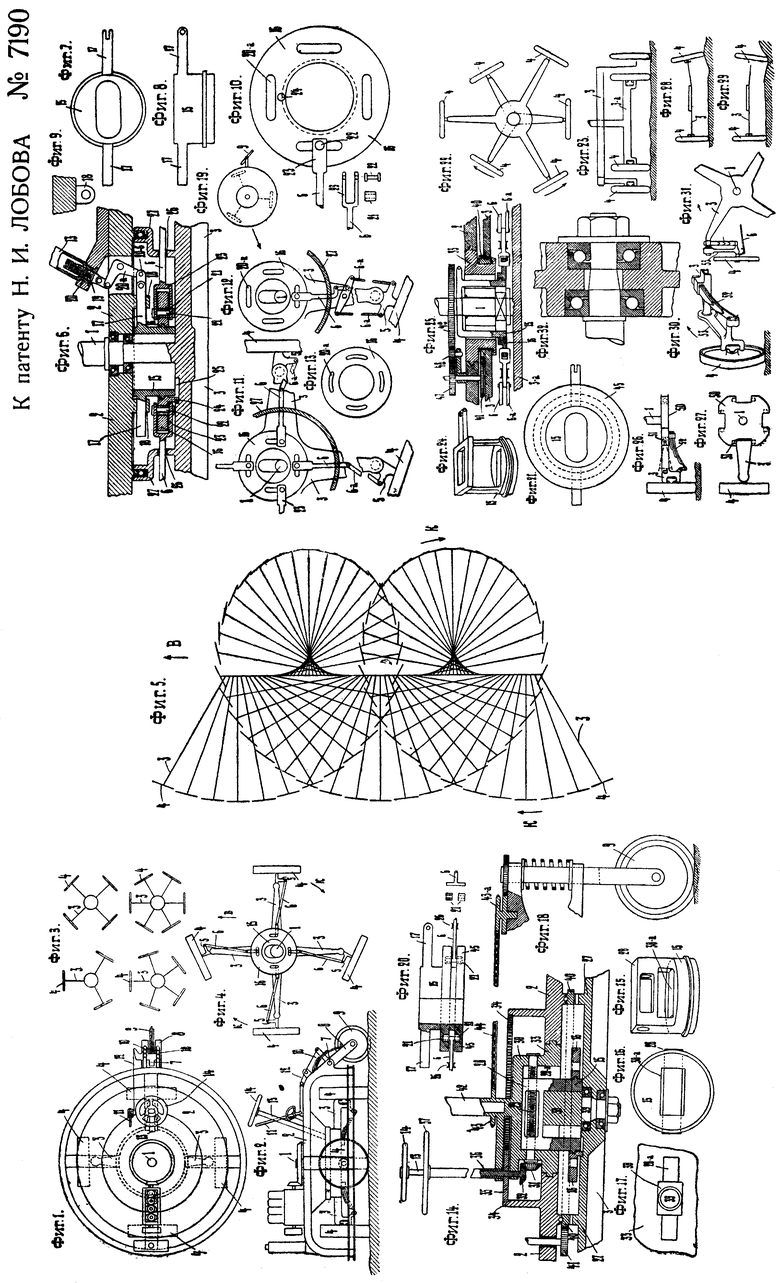
На чертеже фиг. 1 представляет вид в плане предлагаемого трактора, фиг. 2 - вид его сбоку, фиг.3 - схемы трактора с различным количеством ведущих колес, фиг. 5 - схему изменения положения колеса во время хода трактора, фиг. 4, 6-13, 26-32 - детали устройства трактора и фиг. 14-25 - детали видоизменений предлагаемого трактора.
Как видно на фиг. 1 и 2, вертикальный вал 1 проходит через раму 2 и соединен с крестовиной 3 в ее центре (фиг. 4). На концах стрел крестовины 3 посажены колеса 4, которые могут менять угол плоскости вращения. На этих фигурах показана четырехколесная система, но она может обладать любым количеством колес, начиная с трех, четырех, пяти, шести и т.д., как показано на фиг. 3. С одной стороны рамы, посредством шарнира 7, соединен с ней коленчатый рычаг 8, несущий колесо 9. Это колесо постоянно прижато к земле рессорами 10 и служит опорой для рамы при движении трактора. Для поворота трактора (на ходу) достаточно, посредством рычага 11 и троса 12, приподнять колесо 9, чтобы оно вышло из зацепления с почвой; тогда работающий мотор будет вращать не крестовину, а раму (в обратном направлении), и когда рама повернется на требуемый угол, колесо 9 опять прижимается к почве и трактор движется в новом направлении. На стойке 13 посажен маховичок 14, который служит для изменения скорости движения трактора, а также для переднего и заднего хода. Стойка проходит в центр крестовины, где расположен эксцентриковый механизм (фиг. 4). Сердечник 15 связан с рамой и может перемещаться в ту или иную сторону движением маховичка 14 (вал 1 проходит сквозь продольный вырез в сердечнике и не мешает его движению). Сердечник снаружи обхватывается кольцом 16, могущим вращаться вокруг сердечника. С кольцом 16 связаны рычаги 6. При вращении крестовины кольцо 16 также вращается вокруг сердечника, и если он расположен эксцентрично с валом 1, то в определенных частях окружности вращения крестовины рычаги 6 то отходят от центра крестовины, то приближаются, благодаря чему изменяются углы плоскостей вращения каждого колеса. На фиг. 4 стрелкой К показано направление вращения крестовины, стрелкой В - направление движения трактора. Переднее колесо старается выйти из окружности вращения крестовины, заднее же, наоборот, входит внутрь этой окружности; два же боковых колеса касательны к окружности вращения крестовины и в данный момент бегут в противоположные стороны вхолостую, не оказывая влияния на ход трактора.
Фиг. 5 показывает схему изменения положения колеса во время хода трактора; стрелка К показывает направление вращения крестовины, стрелка В - направление трактора; положение колеса взято через 10° поворота крестовины; максимальное отклонение плоскости колеса равно 27° (поступательная скорость взята для большей наглядности уменьшенной, примерно, в два раза). Таким образом, каждое колесо катится по винтовой линии, шаг которой зависит от угла поворота плоскости вращения колеса; при уменьшении шага получим уменьшение поступательной скорости за счет выигрыша силы трактора и наоборот.
Эксцентриковый механизм, меняющий плоскости вращения колес, показан на фиг. 6. Вал 1 проходит через раму 2 и соединен заодно с крестовиной 3; между рамой и крестовиной помещен сердечник 15 (вид сверху и сбоку на фиг. 7 и 8), который пальцами 17 входит в направляющие 18 рамы (фиг. 9), благодаря чему может перемещаться по оси пальцев, посредством системы рычагов, соединенных с червяком 19, приводимым в движение червячным колесом 20, сидящим на стойке 13; сердечник 15 обхватывается кольцом 16 (фиг. 10), имеющим продольные прорезы 20а по числу колес, в которые входят ролики 21, сидящие на штырях 22, укрепленных в хомутах 23, которыми кончаются тяги 6, идущие к колесам. Кольцо 16 вращается вокруг сердечника потому, что оно находится в соединении с крестовиной посредством штыря 24, входящего в радиальный шпоночный прорез 25 крестовины (фиг. 6). Тяги 6, идя от сердечника к колесам, проходят через направляющий сальник 26 в коробке 27, которая при вращении крестовины катится на шариках по раме. Фиг. 11 изображает описанный механизм в плане, при чем колесо управляется одной тягой 6, 6а; фиг. 12 изображает систему двухтягового управления колеса, благодаря чему тяги 6а работают лишь на растяжение. Изменяя форму прореза 20а, можно до некоторой степени менять моменты начала и конца отклонения плоскостей вращения колес; фиг. 13 изображает одну из таких форм. Таким образом, передвигая сердечник в ту или иную стороны, можно получать передний или задний ход; совмещая же центры сердечника и вала 1, получим холостой ход.
Фиг. 14 изображает эксцентриковый механизм, приспособленный, кроме перемены „скоростей, к управлению трактором путем поворота самого сердечника на требуемый угол (направление движения трактора всегда совпадает с осью пальцев 17 эксцентрика, т.-е. с направлением, в котором сердечник может перемещаться в раме). Сердечник здесь имеет иную форму (наружный вид - фиг. 15 и 16); вместо пальцев 17 он снабжен головкой 28, входящей в паз 28а рамы 33 и имеющей нарезку, сквозь которую проходит винт 29, могущий вращаться в направляющей скобе 30 рамы 33 посредством шестерни 31, сцепленной с шестерней 32, сидящей на стойке 13, несущей маховичок 14. Таким образом, при вращении маховичка 14 винт 29 будет передвигать в желаемом направлении сердечник 15. Последний, как и прежде, несет обнимающее кольцо 16 и укреплен в центральной части рамы 33, которая имеет форму диска и может поворачиваться в раме трактора на требуемый угол посредством зубчатого венца 34 на выступе рамы 2 и колеса 35, сидящего на полой стойке 36 (сквозь которую проходит стойка 13), несущей маховичок 37. При вращении маховичка 37 колесо 35 будет катиться по венцу 34 и повернет раму 33, а с нею и сердечник на требуемый угол; в центре рамы 33 есть прямоугольный выступ 38 (он проходит сквозь прорез 38а сердечника), несущий цапфу 39, на которой вращается крестовина (вид на эту часть рамы снизу показан на фиг. 17), которая приводится во вращение благодаря шестерне 40, сидящей на коробке 27 и сцепленной с шестерней 41, получающей движение от двигателя. Рама 33 имеет стойку 42, несущую сидение для шофера, который оказывается при поворотах всегда лицом к направлению движения. Эта стойка несет также шестерню 43, которая при перемене направления, посредством цепи 44 и соответствующей передачи, поворачивает на требуемый угол упорное колесо 9 (фиг. 18). Схема поворота представлена на фиг. 19, где стрелкой показано направление поворота (при повороте сердечника на 90° колесо 9 перестает быть опорным и трактор может быть повернут на месте на любой угол).
Фиг. 20 и 21 изображают другой вид сердечника; вместо обнимающего кольца 16 он снабжен в нижней части двумя кольцевыми выступами 45, в которых выбраны кольцевые выемки. В последних помещаются ролики 21, сидящие на штырях, которыми кончается тяга 6 (на фиг. 20 эти выемки показаны пунктиром). Тяги 6 проходят через направляющий сальник 26, благодаря чему тяги вращаются при вращении крестовины; может быть сделан один кольцевой выступ с выемкой по обеим сторонам. На фиг. 21 форма выемок для роликов показана в виде окружности, но она может быть и другой формы, напр., эллипсоидной или другой, чем будут изменены как моменты, так и продолжительность изменения угла плоскости вращения колес.
Фиг. 22 изображает систему трактора, несущую две крестовины, центры которых совпадают и стрелы которых вращаются в противоположные стороны с равной или различной скоростью, при чем колеса одной крестовины вращаются внутри колес другой крестовины (фиг. 23). У внутренних колес углы поворотов плоскостей колес будут несколько большими, чем у наружных, чтобы ведущие усилия их уравновесились. Такая система не требует упорного колеса; повороты достигаются поворотом сердечника (действущего для обеих крестовин) вокруг своей оси на требуемый угол. Такая система может двигаться с любой точки в любом направлении. Фиг. 25 показывает разрез эксцентрикового механизма такой системы; крестовина 3а вращается вместе с валом 1, крестовина же 3 вращается вокруг диска 33 и приводится в движение (как на фиг. 14) шестерней 41, сцепленной с шестерней 40, сидящей на крестовине. Посредством шестерен 47, 48 и 49 достигается движение крестовин с требуемой скоростью. Сердечник один и только тяги 6 имеют по два отвода, действующие каждый на отдельную крестовину. Наружный вид сердечника показан на фиг. 24.
Фиг. 26 показывает подрессоривание колес трактора, при чем каждая стрела укреплена в основании крестовины 50 посредством цапф 51 и может поворачиваться на некоторый угол а. Рессора 52, укрепленная толстым концом у основания крестовины, тонким концом, посредством серьги, укреплена у свободного конца стрелы и оттягивает его книзу. Фиг. 27 показывает тот же вид в плане. Фиг. 28 и 29 показывают положение таких подрессоренных колес при попадании на возвышения и углубления. Фиг. 30 показывает другой способ подрессоривания колес, при чем колесо укреплено на конце шарнирного рычага 53, сидящего на конце стрелы (под углом 90°), кончающейся цапфой (другой конец стрелы в этом случае наглухо соединен с основанием крестовины). Конец рычага и стрела 3 соединены посредством рессоры 52, оттягивающей колесо книзу. Фиг. 31 показывает тот же вид в плане.
Фиг. 32 наказывает втулку колеса трактора; шариковые подшипники должны быть рассчитаны на значительное боковое усилие.
| название | год | авторы | номер документа |
|---|---|---|---|
| Железнодорожный путеизмеритель | 1939 |
|
SU59481A1 |
| МАШИНА ДЛЯ БУКСИРОВАНИЯ ПЛУГОВ И ДРУГИХ С.-Х. ОРУДИЙ | 1924 |
|
SU3971A1 |
| УСТРОЙСТВО ДЛЯ КОПИРОВАНИЯ ЧЕРТЕЖЕЙ, РИСУНКОВ И Т. П. | 1932 |
|
SU37346A1 |
| УСТРОЙСТВО КАРУСЕЛЬНОГО ТИПА ДЛЯ МЕХАНИЧЕСКОЙ СБОРКИ БОЧЕК ИЗ КЛЕПОК | 1935 |
|
SU46033A1 |
| Веломобиль с пневмоаккумуляторным приводом | 1988 |
|
SU1717471A1 |
| Автоматический прибор для вычерчивания плана и профиля пройденного пути | 1933 |
|
SU34162A1 |
| ПРИБОР ДЛЯ ПОЛУЧЕНИЯ ИСХОДНЫХ ДАННЫХ ПРИ ЗЕНИТНОЙ СТРЕЛЬБЕ | 1925 |
|
SU4656A1 |
| Машина для прочесывания щетины | 1935 |
|
SU51029A1 |
| Передвижной гидромонитор | 1939 |
|
SU61432A1 |
| Прибор для упражнения в стрельбе по морским целям | 1930 |
|
SU25074A1 |
1. Колесный трактор, характеризующийся совокупным применением: а) механизма для передачи движения сидящим свободно на осях 5 ведущим колесам 4, 4…, состоящего из крестовины 3, которая поддерживает шарнирно закрепленные в ней вышеуказанные оси 5 для колес 4 и имеет число стрел, соответствующее числу колес 3, 4…6, (фиг. 1-4,) и вертикального вала 1, скрепленного с крестовиной и приводимого во вращение конической передачей от вала двигателя; б) механизма для изменения скорости и направления движения трактора, состоящего из расположенного между рамой 2 и крестовиной 3 сердечника 15 (фиг. 6-11), который, посредством рычажно винтовой передачи 13, 20, 19, 20а и 20b, может перемещаться от маховичка 14 вдоль рамы, скользя своими пальцами 17 в направляющих 18, и свободно сидящего на заплечике сердечника 15 кольца 16, которое вращается вместе с крестовиной 3 и, посредством шарнирно соединенных с ним и с осями 5 рычагов 6 (фиг. 4, 6) или 6а (фиг. 11, 12), изменяет наклон плоскостей вращения колес 4, и в) устройства для поворота трактора, которое состоит из опорного колеса 9 (фиг. 1, 2), сидящего на установленном поворотно на раме 2 коленчатом рычаге 8, который нагружен рессорами 10 и может подниматься посредством рычага 11 и троса 12.
2. Видоизменение охарактеризованного в п. 1 трактора, отличающееся тем, что: а) сердечник 15, снабженный головкой 28 (фиг. 14-17), входящей в раму 33, передвигается от маховичка 14 посредством конической передачи 32, 30 и винта 29 и может поворачиваться от маховичка 37 посредством колеса 35 и зубчатого венца 34 на выступе рамы 2, чем достигается поворот трактора; б) вращение от двигателя к крестовине 3 передается посредством вертикального вала и цилиндрической передачи 41, 40 (фиг. 14) и в) установка опорного колеса 9 по направлению движения трактора производится от стойки 42 цепной передачей 43, 44 (фиг. 14).
3. Видоизменение охарактеризованного в п. 1 трактора, отличающееся применением двух крестовин 3 и 3а (фиг. 22, 23), при чем крестовина 3а приводится во вращение непосредственно валом 1, а крестовина 3 - при помощи передачи 49, 48, 47, 41 и 40 (фиг. 25).
4. Применение в тракторе, охарактеризованном в п. 1, для ведущих колес-рессор 52, которые действуют или на шарнирно закрепленные в крестовине 50 стрелы 3 (фиг. 26, 27) или же на шарнирные рычаги (фиг. 30, 31).
