нкя плоскости горизонта в инерциальном пространстве, которая суммируется с горизонтальной составляющей уг-ЛОвой скорости вращения Земли. Если объект имеет состэлзляющую cKOpocTs-t перемещения направленную по меридр ану (ceBepHiio составляющую скорости) j то суммарн йектор угловой скорости эраиения плоскости горизонта не будет лежать в плоскости меридиана и составит с ней угол
IN
s
R - радиус Земли,
те
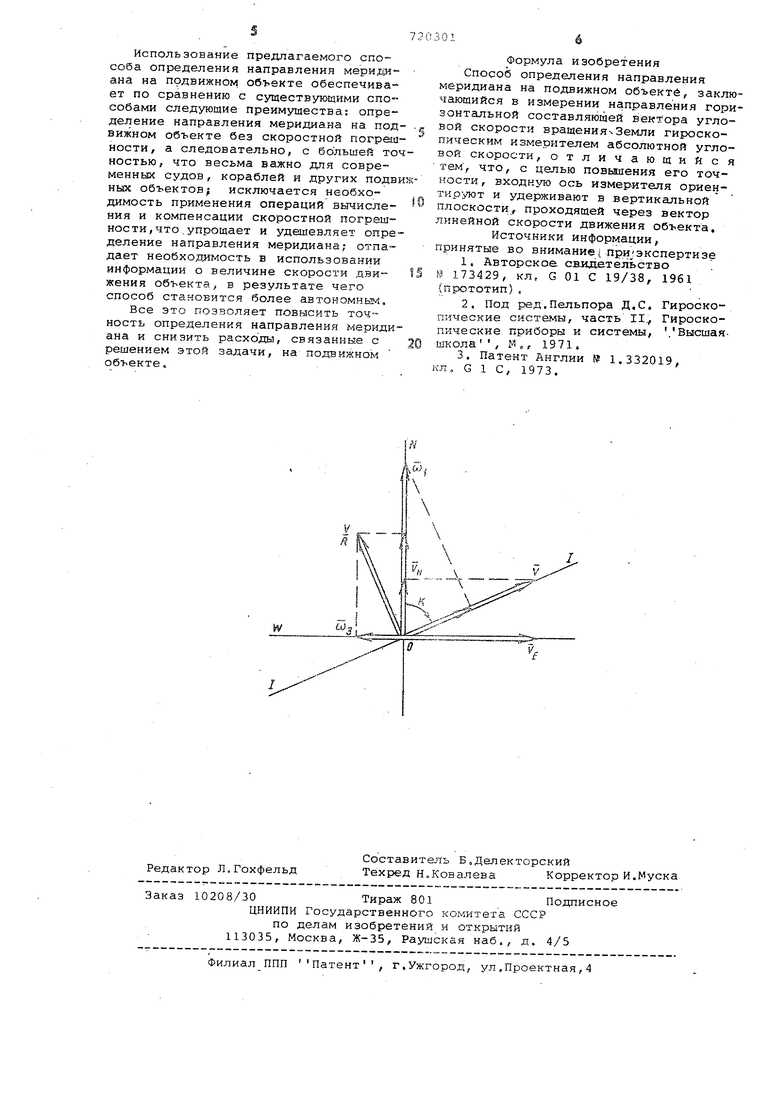
V - угловая скорость вращекия Земли, f..f - широта местоположения
объекта,
У и Vp - составляющие скороати движения обьектзр направленные по мери.цкану и пар.аллели соответственно.
Так как гироскоп реагирует на сбаолютн)ю угловую скорость,. то при движении объекта будет определено направление не плоскости меридианс, а ПЛОСКОСТИ; проходящей через суммарный вектор угловой скорости вращения плоскости горизонта. Это и приводит к появлению скоростной погреюности,равной .углу ,
в связи с этим при применении из™ вестньрс способоз треб ются дополн;- тельные операции по вычислению сксгростной погрешности за счет нспопъ-зования информации о широте н скорости движения объекта, которая вы-рабатынается другими измерителягли к по компенсации ее з измеренном значении курса объекта. При этом ;:смпенсация осуществляется с некоторой погрешностью из-за погрешностей., содержащихся в используемой информации; Кроме того, эти операции усложняю;: способ определения направлег-п-; wiecin диана, удорожают его и требуют дополнительные- ; расходов в -эксплуата.. ции,
Целью изобретения является исключение влияния деверной составляющей линейной скорости движения объекте на определение направления меридис1на и, как следствие,- повынение точности определения направления меридиана на подЬижном объекте.
Это достигается тем, что по предлагаемому способу определения направления меридиана, включающему операци измерения горизонтальной составляюще угловой скорости вращения Земли с помощью измерителя абсолютной угловой (Зкорости, предварительно ориентируют входную ось этого измерителя в нертикальной плоскости, проходяшей через вектор линейной скорости движения объекта. Причем вкодная ось измерителя постоянно удерживается в этой плоскости, а не вращается вокруг вертикааьной оси как в известных способах ,
При указанной ориентации входной оси измерителя угловой скорости составляющая угловой скорости вращения илось:ости горизонта, обусловлек1чая перемещением объекта по поверхкости Земли, будет лежать s плоскости,, -перпендикулярной измерительной оси преобразователя и, следовательно, не бу.цат иметь проекции на эту ось „
Предлагаемый способ поясняется чертежом, на котором изображена плоскость горизонта с расположеныьми в ней полуденной линией (ON) от пересечения с плоскостью меридиана и линией (OW) от пересечения с плоскостью первого эертикала. Здесь же показаны векторьзаз и ш измеряемых угловых скоростей и вектор V линейной скорос.ти движения объекта,
Б качестве измерителя абсолютной угловой скорости вращения плоскости горивонта в инерциальном пространстве при осуществлении предгагаемого способа могут быть использованы двухстепенной гироскоп,,, работающий в режыме гкротахометра, лазерный гироскоп или гироскопкческое устройство, э ко-уором моделируется вращение плоскости гегркзонта S Пусть g например, испо,1ь-яуатся гиротахометр,. Его измери:1:ельнун) ось необхо,димЬ располохить в плоскости , горизонта и с д,остаточной точностью удерживать в ней,, Об-ьект движется по поверхности Земли с ,пикейной скоростью V,, направленнсй под углом К к п,лос;: :ости меридиана. f ;ABMecTHM измерительнук ось I-I ги-, ротакометра, с вертнкальной плоск1эсть;проходящей через вектор V. Плоскость горизонта вращается с угловыми скорое
tr o Vs-inK VcosK . (Аз Чсль г+- щ--y:a:,.--ff
Баяодной сигнал гиротахометра будет пропорционален проекциям этих угловых скоростей яа ось I--I
8 ;Т Cuj. sin k)-m(V&o,4ocbK / V T:-f;r5 nK-eosK -f-oo5i(-5-ir K}-niVcos%o.K ,
г,це m - масштабный коэффициент выхо,цкой характеристики гиротахометра , Угол К вычисляется по формуле
Ь
K qPCC05;.,p.r
Его величина не зависит от л1-;нейной скорости движения объекта и определяется без скоростной погоешностн. Использование предлагаемого способа определения направлении меридиана на подвижном объекте обеспечивает по сравнению с существуюшими способами следующие преимуществas определение направления меридиана на под вижном объекте без скоростной погреш ности, а следовательно, с большей то ностью, что весьма важно для современных судов, кораблей и других подв ных объектов; исключается необходимость применения операций вычисле НИН и компенсации скоростной погрешности, что .упрощает и удешевляет опре деление направления меридиана; отпадает необходлмость в использовании информации о величине скорости движения объекта, в результате чего способ становится более автономным, Все это позволяет повысить точность определения направления мериди ана и снизить расходы, связанные с решением этой задачи, на подвижном объекте. Формула изобретения Способ определения направления меридиана на подвижном объекте, заключающийся в измерении направления горизонтальной составляющей векТора угловой скорости вращенияч Земли гироскопическим измерителем абсолютной угловой скорости, отличающийся тем , что, с целью повьшения его точности , входную ось измерителя ориентируют и удерживают в вертикальной плоскости, проходящей через вектор линейной скорости движения объекта. Источники информации, принятые во внимание при;экспертизе 1,Авторское свидетельство f 173429, кл, G 01 С 19/38, 1961 (прототип), 2.Под рел,Пельпора Д.С, Гироскопические системы, часть II., Гироскопические приборы и системы, .ВысшаяМ,, 1971. школа 3, Патент Англии № 1.332019, кл, G 1 С, 1973,