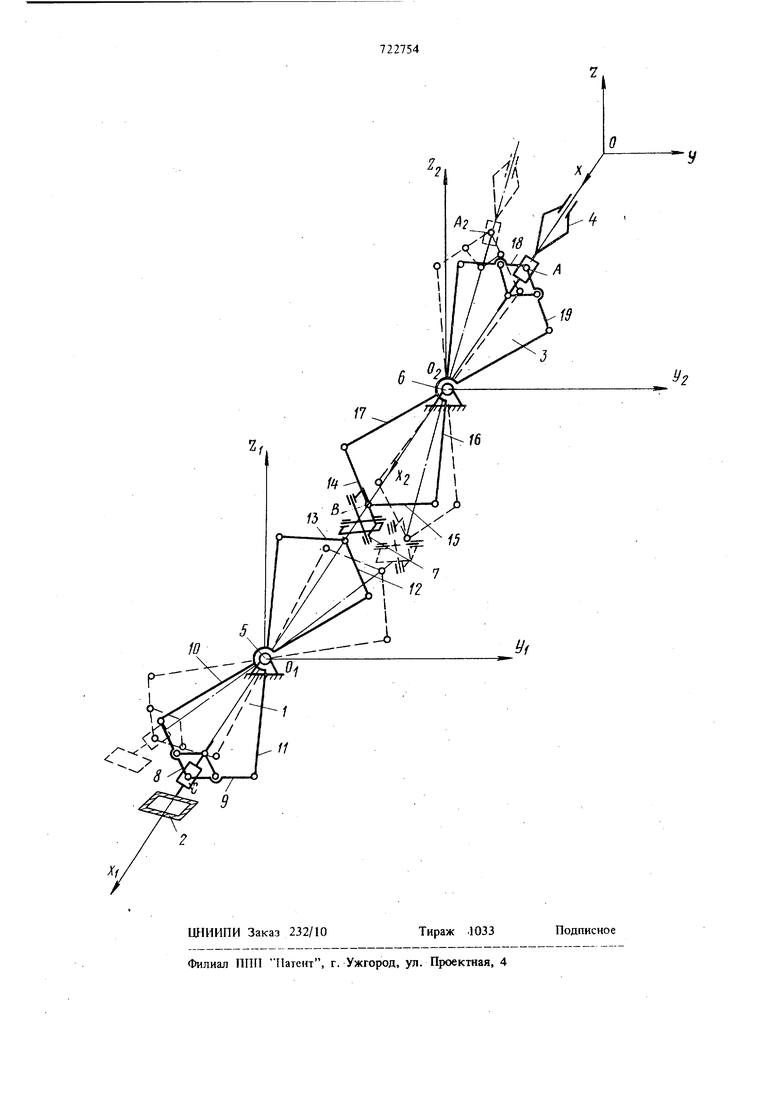
Изобретение относится к машиностроению, в частности к ручным манипупяторам копирую щего типа, предназначенным для выполнения в изолированных камерах различных работ, напри мер покрасочных, монтажных, не требующих значительных усилий на управляющих органах. Известен копирующий манипулятор, содержа щий задающий и исполнительный органы, кине матически связанные между собой, каждый кз которых выполнен в виде шарнирного многозвенника 1. Движение от задающего органа к исполнительному передается за счет тросов, тросовых блоков, лент с участками втулочно-роликовых цепей, ленточных блоков и роликов. Данный манипулятор имеет сложную конструкцию, что значительно снижает точность воспроизведения схватом движения задающего органа. Целью изобретения является упрощение конструкции и повыщение точности позиционирования. Достигается она тем, что каждый многозвен ник выполнен в виде пантографа Шейнера и установлен в шаровом шарнире, а кинематическая связь задающего и исполнительного органов осуществлена посредством шарнира Гука. На чертеже дана кинематическая схема описываемого манипулятора в исходном положении (оси задающего и исполнительного органов лежат на линии, соединяющей центры шаровых шарниров). Манипулятор состоит иj задающего органа 1, который выполнен в виде пантографа Шейнера с рукояткой 2 управления, и также выполненного в виде пантографа Шейнера исполнительного органа 3, служащего для перемещения установленного на нем схвата 4. Пантографы установлены на шаровые опоры 5 и 6 н соединены между собой щарниром 7 Гука, крестовина которого в исходном положении перпендикулярна осям пантографов. Каждый пантограф состоит из трех пар звеньев, шарнирно соединенных между собой; задающий пантограф - из звеньев 8 и 5, ю н 11, 12 и 13, а исполнительный пантограф - из звеньев 14 и 15, 16 н 17, 18 и 19.
Любое поступательное перемещение управляющей рукоятки 2, расположенной в точке С задающего пантографа, вдоль какой-либо оси системы коордгшат OiXiYiZi с началом координат в центре шаровой опоры 5 приводит к противоположному перемещению точки В исполнительного пантографа вдоль этой же оси. В свою очередь, перемещение точки В, принадлежащей исполнительному пантографу, относительно осей системы координат YjZj с началом координат в центре шаровой опоры 6, также приводит к противоположному перемещению точки А относительно этих же осей. В итоге, поступательным перемещениям рукоятки 2 манипулятора, расположенной в точке С в системе OjXiY|Zi с началом координат в центре щаровой опоры 5, соответствуют идентичные (или подобные) перемещения точки А со охватом 3 относительно осей системы координат OXYZ с началом в точке О, расположенной на оси, соединяющей центры щаровых опор идентично (или подобно) расположению начала точки О по отношению к точке С.
Величина АО определится из выражения:
СО
°%
t9e
,.2
ов
- во
При вращении управляющего пантографа вокруг осей OjYi (или OiZi) шарнир Гука допускает вращение исполнительного пантографа вокруг осей (или OjZj) в противоположном нагфавлении. При этом точка А (схват) в системе OXYZ совершает движение идентичное (или подобное) движению тошси С (рукоятка управления) в системе OXYZ (на чертеже изображено пунктиром).
При вращении управляющего пантографа вокруг оси OiXi (вокруг продольной оси уп227544
равляющего пантографа) охват 4 вращается с помощью шарнира Гука вокруг оси OjXj (вокруг продольной оси исполнительного пантографа) идентично вращению рукоятки 2 5 управления.
Простота и надежность конструкции предлагаемого манипулятора позволяет изготовить его при наличии несложного оборудования и обеспечивают его длительную эксплуатацию. 10 Предлагаемый манипулятор может применяться в самых различных областях производства, связанных с вредными условиями труда. Он устанавливается в изолированных камерах (зонах), где пребывание человека невозможно или неже15 лательно (обработка или перемещение изделий в вакууме, под давлением, в радиоактивных или химически вредных камерах). При этом повышенная точность позициониродания манипулятора значительно облегчает работу опера20 тора и позволяет манипулировать предметом труда как при непосредственном наблюдении за ним, так и при отсутствии такой возможности (работа с аналогом предмета труда).
Формула изобретения
Копирующий манипулятор,-содержащий задшощий и исполнительный органы, кинематически связанные между собой, юаждьш из которых выполнен в виде шарнирного многозвенника, отличающийся тем, что, с целью упрощения конструкции и повышения точности позиционирования, каждый
многозвенкик выполнен в виде пантографа Шейнера и установлен в щаровом шарнире, а кинематическая связь осуществлена посредством шарнира Гука.
Источники информации,
принятые во внимание при экспертизе 1. Манипуляторы. Каталог-справочник, Л., 1968, с. 75-77 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1980 |
|
SU933447A2 |
| Манипулятор | 2018 |
|
RU2710699C2 |
| МАНИПУЛЯТОР | 2018 |
|
RU2693963C1 |
| МАНИПУЛЯТОР | 2019 |
|
RU2716327C1 |
| МАНИПУЛЯТОР | 2019 |
|
RU2722505C1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Копирующий манипулятор | 1979 |
|
SU854706A1 |