Предполагаемое изобретение относится к машиностроению, в частности к манипуляторам, работающим в герметизированном объеме и может быть использовано в технологических процессах изготовления электронных приборов, обработке радиоактивных, токсичных и взрывчатых веществ, а также для проведения ряда дистанционных работ, осуществляемых в высоком вакууме, открытом космосе, под водой.
Известен манипулятор, содержащий двуплечий рычаг, несущий рабочий орган. Двуплечий рычаг в средней части выполнен со сферическим утолщением, установленном в шаровом поясе, вваренном в стенку изолированной камеры. В зазоре между сферическим утолщением и шаровым поясом установлен сепаратор с шариками. Шаровой пояс герметизирован сильфоном, приваренным одним концом к этому поясу, а другим к двуплечему рычагу /1/.
Недостатком известного манипулятора является ограниченная область обслуживания, т.е. рабочий орган может перемещаться только по сферической поверхности одного радиуса, из-за того, что длина рабочего плеча двуплечего рычага не может быть изменена в процессе работы.
В качестве прототипа выбран манипулятор, содержащий корпус, привод поступательного движения и захват, связанный с. корпусом посредством шарнирного многозвенника. /2/.
Этот манипулятор имеет более широкую область обслуживания по сравнению с аналогом, благодаря возможности изменять длину шарнирного многозвенника в процессе работы. Однако ему присуща относительно низкая жесткость исполнительного органа, что снижает точность фиксации образцов при осуществлении технологических операций. Низкая жесткость обусловлена конструкцией шарнирного многозвенника.
Целью изобретения является обеспечение точности позиционирования образцов за счет повышения жесткости исполнительного органа.
Поставленная цель достигается тем, что в известном манипуляторе, содержащем корпус, привод движений, захват, шарнирный многозвенник, соединяющий захват с корпусом, согласно изобретению шарнирный многозвенник образован двумя шарнирными ветвями, расположенными по разные стороны захвата, связанными между собой образующими внутренние шарниры штифтами и закрепленными посредством шаровых опор в корпусе, а выходящее из корпуса свободные концы шарнирных ветвей связаны с приводом движений.
Отличительные от прототипа признаки являются существенными, т.к. каждый из ни необходим, а все вместе с ограничительными достаточны для достижения поставленной цели. Действительно в известном манипуляторе все звенья шарнирного многозвенника лежат в одной плоскости и из-за этого исполнительный орган в направлении перпендикулярном данной плоскости имеет незначительную жесткость. При эксплуатации шарнирный многозвенник изгибается, что затрудняет позиционирование захвата. Выполнение же в заявляемом манипуляторе шарнирного многозвенника из двух шарнирных ветвей позволяет разнести звенья шарнирного многозвенника в разные плоскости, что повышает жесткость исполнительного органа. Соединение шарнирных ветвей штифтами также способствует повышению жесткости исполнительного органа. Закрепление шарнирных ветвей посредством шаровых опор в корпусе обеспечивает работоспособность конструкции шарнирного многозвенника образованного двумя разнесенными в разные плоскости ветвями.
Из отличительных от прототипа признаков известным является закрепление исполнительного органа посредством шаровой опоры в корпусе /1/. Такие же признаки, как: выполнение шарнирного многозвенника из двух шарнирных ветвей, расположение шарнирных ветвей по разные стороны захвата,, соединение шарнирных ветвей друг с другом с помощью штифтов, образующих внутренние шарниры многозвенника, в исследованных аналогах не обнаружены. Следовательно заявляемый манипулятор отвечает критерию «существенные отличия».
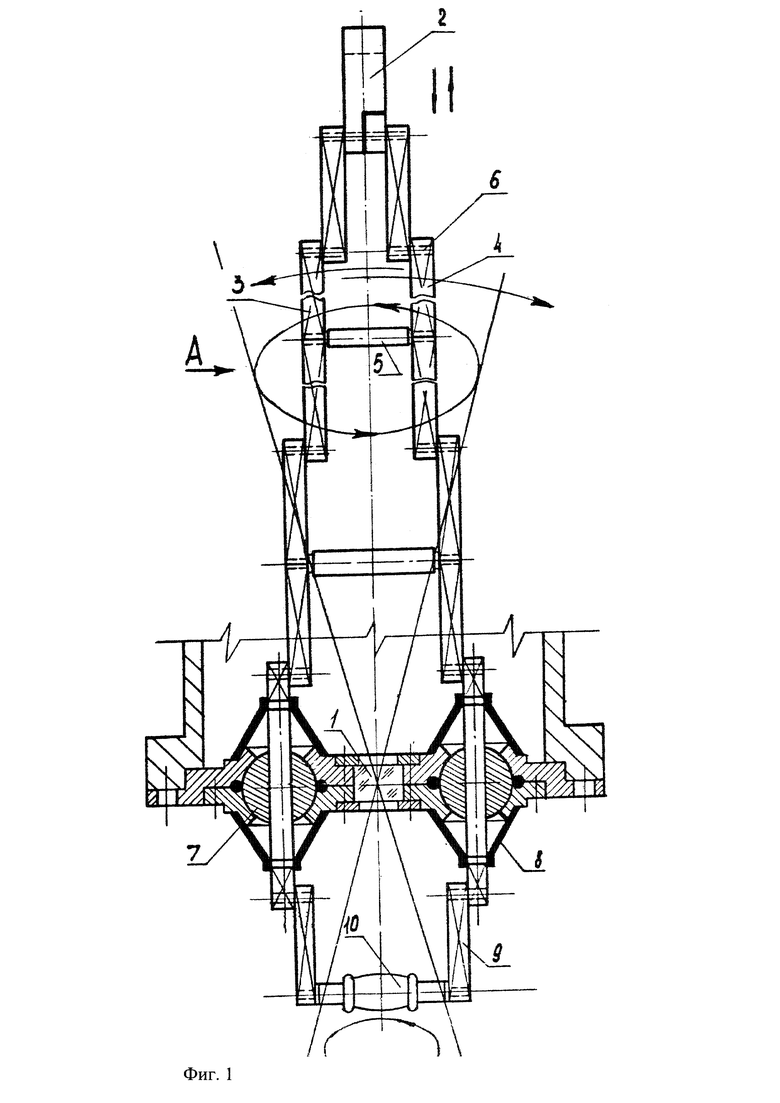
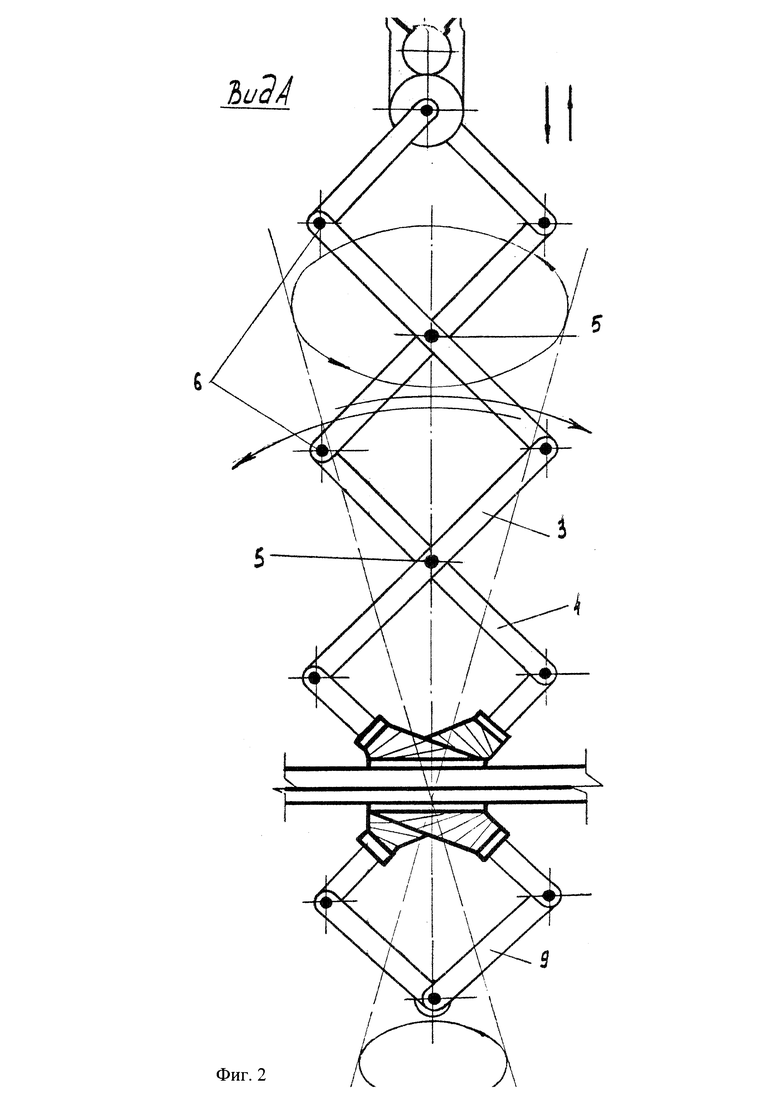
Сущность изобретения пояснена чертежами, где на фиг. 1 изображен общий вид манипулятора, на фиг. 2 - вид А фиг. 1.
Манипулятор содержит корпус 1, захват 2, шарнирный многозвенник, образованный двумя шарнирными ветвями 3 и 4, которые соединены между собой штифтами 5. Штифты 5 являются внутренними шарнирами шарнирного многозвенника. Звенья одной шарнирной ветви связаны между собой внешними шарнирами 6 шарнирного многозвенника. Свободные концы шарнирных ветвей 3, 4 запрессованы в шаровых опорах 7, установленных в корпусе 1. Выходы звеньев, запрессованных в шаровых опорах 6 из корпуса 1,. герметизированы чехлами 8.
Выходящие из корпуса 1 свободные концы ветвей 3 и 4 шарнирно соединены посредством тяг 9 с рукояткой управления 10, выполняющей роль привода движений. Работает манипулятор следующим образом.
Для перемещения захвата 2 вдоль оси исполнительного органа рукоятке управления 10 придают поступательные движения. При перемещении рукоятки управлении 10 в сторону корпуса 1, она при помощи тяг 9 поворачивает звенья шарнирных ветвей 3 и 4, запрессованные в шаровые опоры 7, стремясь придать им положение, перпендикулярное оси исполнительного органа. Благодаря внешним шарнирам 6, соединяющим звенья, относящиеся к одной из шарнирных ветвей 3 или 4, эти звенья поворачиваются относительно образующих внутренние шарниры штифтов 5, стремясь также принять положение, перпендикулярное оси исполнительного органа.
8 результате этих перемещений звеньев шарнирных ветвей 3 и 4 захват 2 движется в сторону корпуса 1.
При перемещении рукоятки управления 10 о т корпуса 1 звенья шарнирных ветвей 3 и 4 стремятся занять положение, параллельное оси исполнительного органа. Захват 2 при этом движется от корпуса 1.
Придавая рукоятке управления 10 качательные движения в любой из плоскостей, проходящих через ось исполнительного органа, посредством тяг 9 передают эти качательные движения шарнирным ветвям 3 и 4. Вместе с шарнирными ветвями 3 и 4 качательные движения совершает захват 2.
Благодаря закреплению крайних звеньев шарнирных ветвей 3 и 4 в шаровых опорах 7 возможна передача от рукоятки управления 10 к захвату не только качательных но и прецессионных движений. Для этого перемещают геометрический центр рукоятки управления 10 (т.е. все точки этой рукоятки) по окружности. Через тяги
9 круговое перемещение рукоятки управления 10 передаются выходящим из корпуса 1 концам запрессованных в шаровые опоры 7звеньев. Противоположные концы этих звеньев также совершают синхронное перемещение по кругу только в обратном направлении. В результате шарнирные ветви 3 и 4 вместе с захватом 2 совершают прецессионное движение. Чехлы 8 обеспечивают герметизацию передачи всех видов движений.
По сравнению с прототипом в заявляемом манипуляторе повышается жесткость исполнительного органа, благодаря тому, что шарнирные ветви многозвенника разнесены друг от друга, а их концы запрессованы в разных шаровых опорах.
Повышение жесткости исполнительного органа в плоскости, проходящей через оси шарниров, исключает изгибание шарнирного многозвенника, т.е. обеспечивает точное позиционирование захвата. Кроме того по сравнению с прототипом расширяется зона обслуживания, за счет прецессионного и качательного движений захвата.
Источники информации:
1. А.с. СССР №517482, Мкл. B25J 1/00, 1976 г.
2. А.с. СССР №963847, Мкл. B25J 9/00,1981 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2018 |
|
RU2693963C1 |
| МАНИПУЛЯТОР | 2019 |
|
RU2716327C1 |
| МАНИПУЛЯТОР | 2019 |
|
RU2722505C1 |
| Манипулятор | 2018 |
|
RU2711486C2 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2019 |
|
RU2724735C1 |
| Шпаговый манипулятор | 2018 |
|
RU2698114C2 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
Изобретение относится к манипулятору. Манипулятор содержит корпус, привод движений, захват и шарнирный многозвенник, соединяющий захват с корпусом. Шарнирный многозвенник образован двумя шарнирными ветвями, расположенными по разные стороны от захвата, связанными между собой образующими внутренние шарниры штифтами. Выходящие из корпуса свободные концы шарнирных ветвей запрессованы в шаровых опорах, установленных в корпусе, и связаны с приводом движений. В результате обеспечивается точность позиционирования за счет повышения жесткости исполнительного органа. 2 ил.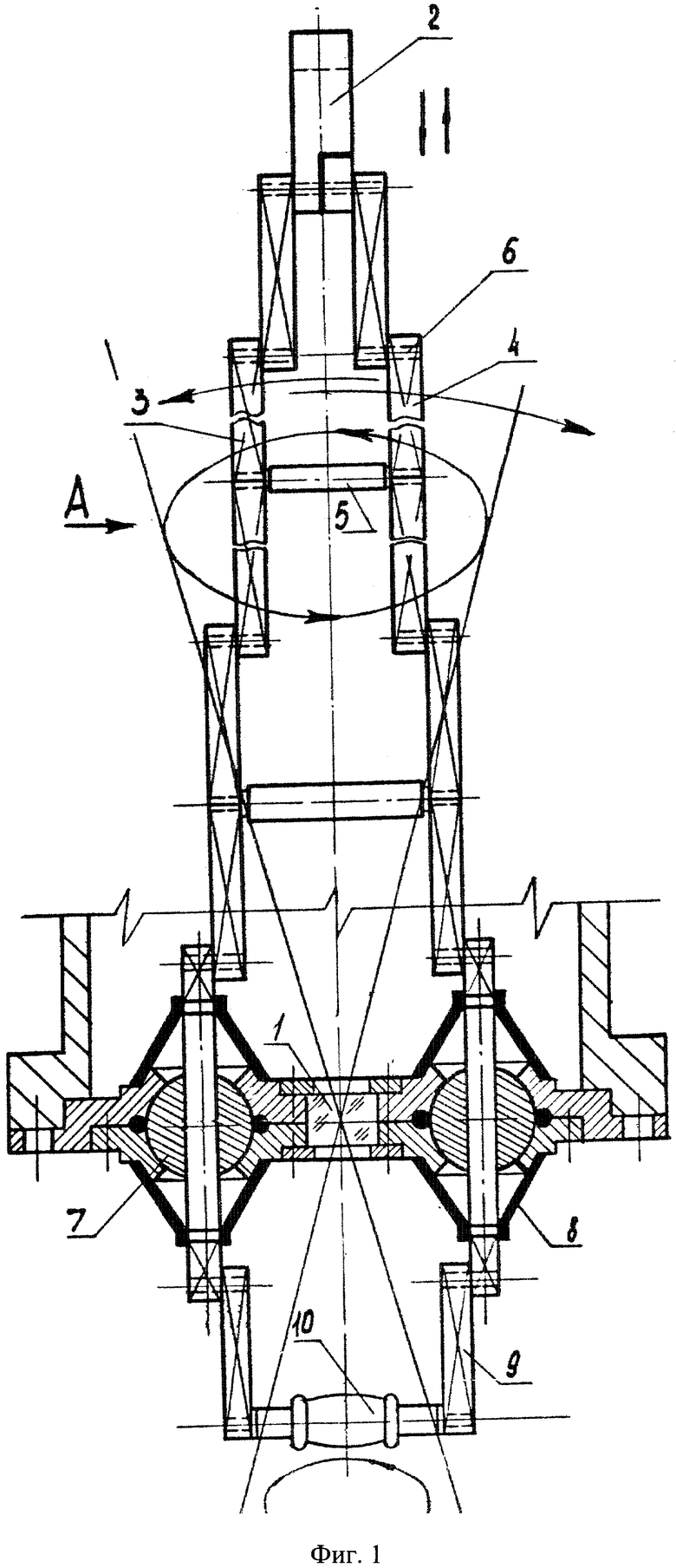
Манипулятор, содержащий корпус, привод движений, захват и шарнирный многозвенник, соединяющий захват с корпусом, отличающийся тем, что шарнирный многозвенник образован двумя шарнирными ветвями, расположенными по разные стороны от захвата, связанными между собой образующими внутренние шарниры штифтами, а выходящие из корпуса свободные концы шарнирных ветвей запрессованы в шаровых опорах, установленных в корпусе, и связаны с приводом движений.
| Манипулятор | 1981 |
|
SU963847A1 |
| Копирующий манипулятор | 1974 |
|
SU517482A1 |
| Захват манипулятора | 1979 |
|
SU772843A1 |
| US 20170056117 A1, 02.03.2017. | |||

