(54) КОПИРУЮЩИЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1978 |
|
SU722754A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Копирующий манипулятор | 1979 |
|
SU854706A1 |
| Копирующий манипулятор | 1980 |
|
SU1024265A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор самоходного шасси | 1982 |
|
SU1069988A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Манипулятор с ручным управлением | 1980 |
|
SU948658A1 |
| Манипулятор | 1981 |
|
SU1038219A1 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
Изобретение относится к области машиностроения, в частности к манипуляторам копирующего типа, предназначенным для выполнения в изо- , лированных камерах различных работ, например покрасочных, монтажных и ;цругих, не требующих значительных усилий на управляющих органах.
По основному авт.св. 722754 известен копирую1ций манипулятор, используе1 1й в изолированных камерах (зонах) преимущественно ограниченного объема. Этот манипулятор состоит из Зс1дающего и исполнительного органов, каждый из которых выполнен в виде пантографа Шейнера и установлен в шаровом шарнире, а кинематическая связь между ними осуществляется посредством шарнира Гука i.
Однако рабочая зона данного маниnjfjfiHTopa ограничена.
Целью изобретения является раоиирение зоны обслуживания манипулятора угла.
Это достигается тем, что предлагаемый копирующий манипулятор дополнительно снабжен кронштейном, установленным с возможностью вращения вокруг оси, направление которой совпадает
с центральной осью шарового шарнира задающего органа, причем шаровой шарнир исполнительного органа установлен на указанном кронштейне.
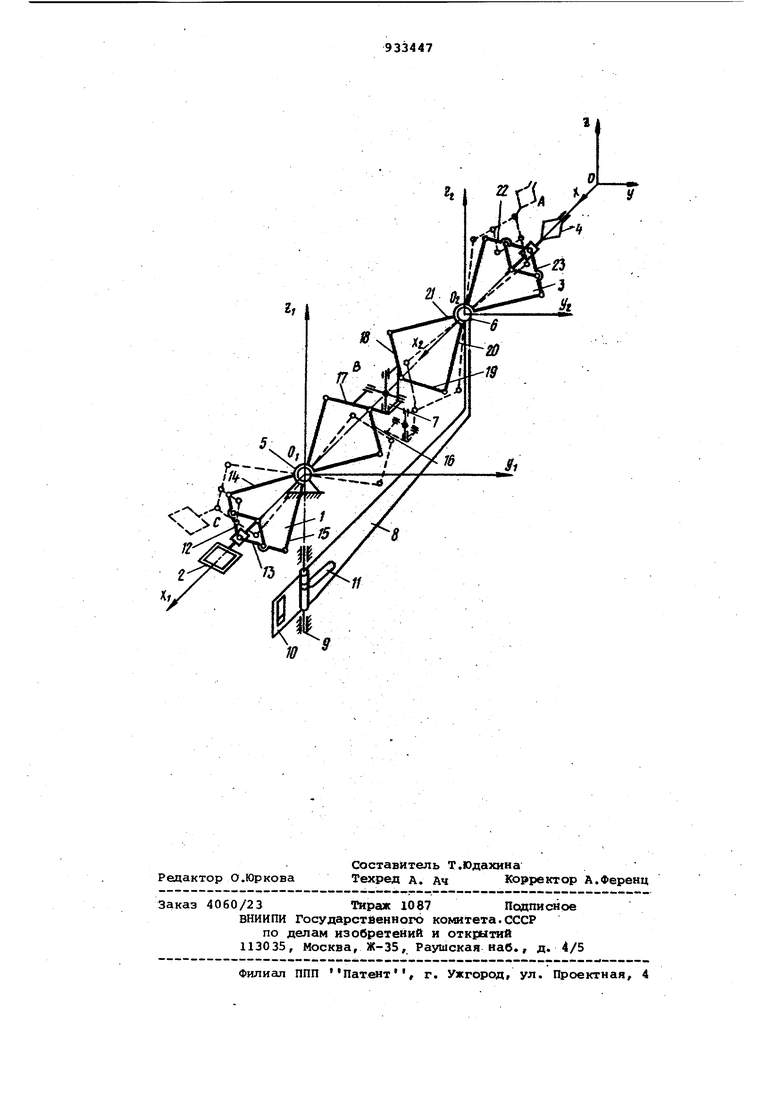
На чертеже представлена кинематическая схема копирующего манипулятора в исходном положении (оси задающего и исполнительного органов ле.жат на линии, соединяющей центры
10 шаровых Опор).
Манипулятор содержит задающий орган 1, который выполнен в виде пантографа Шейнера с рукояткой управления 2, и так же выполненный в ви-5 де пантографа Шайнера исполнительный орган 3, служащий для перемещения установленного на нем схвата 4. Пантографы установлены на шаровые опоры 5 и б и соединены между
20 собой шарниром Гука 7, крестовина которого в исходн положении перпендикулярна осям пантографов. При этом шаровая опора 5 неподвижна, а опора 6 установлена на кронштейне 8, вращшощемся вокруг вертикальной оси 9, направление которой совпадает с центральной осью шарового шарнира 5. Положение кронштейна устанавливается с помощью рукоятки
30 10 и фиксируется зажимом 11.
Кажда1й пантограф состоит из трех пар звеньев, шарнирно соединенных между собой« пантограф 1 из пар звеньев 12 и 13, 14 и 15, 16 и 17, пантограф 3 -. из пар звеньев 18 и 19, 20 и 21, 22 и 23.
Манипулятор работает следуюашм образом.
При фиксированном положении кронштейна 8 любое поступательное пере|иющение управляющей рукояткой 2, расположенной в точке С пантографа 1 вдоль какой-либо оси систеглл координат с началом координат в центре шаровой опоры 5, приводит к противоположного перемещению точки В пантографа 1 вдоль этой же оси. . В свою очередь перемещение точки В, принадлежащей и пантографу 3, относительно осей системл координат 02X2X2 2 началом координат «
центре шаровой опоры б, .также приводит к противоположному п емещению точки А относительно этих же осей.
В итоге поступательным переметениям управляющей рукоятки манипулятора 2, расположенной в точке С в системе с началом координат в центре шарово1й опоры 5, соответствуют идентичные (или подобные) перемацения точки А со схватом 3 относительно осей системл OXYZ с нача- . лом в точке О, расположенной на оси, соединяющей центры шаровых опор идентично (или подобно) расположению начала точки о по отнсшению к точке С..
При вращении управляющего пантографа вокруг осей 0 Х (или ) шарнир Гука допускает вращение исполнительного пантографа 3.вокруг осей 02.2. (или ) в противоположном направлении. При этом точка А (схват в системе OXYZ совершает движение, идентичное (или подобное) движению точки С (рукоятка управления) в сиетеме (на чертеже изображено пунктиром).
При вращении управляющего пантографа 1 вокруг оси (или вокруг
, 50 продольной оси управляющего пантог рафа 1) вращение схвата 4 посредством
шарнира Гука осуществляется вокруг оси ОХ (или вокруг продольной оси исполнительного пантографа 3) идентично вращению рукоятки управления,
При-необходимости расширения зот ны обслуживания манипулятора производится перенос подвижной опоры б посредством .йоворота в нужную сторону кронштейна 8.
П1ростота и надежность конструкции предлагаемого манипулятора дает возможность его изготовления при наличии несложного оборудования и предполагает его длительную эксплуатацию. Это обуславливает возможность широкого распространения данного манипулятора в сашх различных областях производства, связанных с вредными условиями труда, он устанавливается а изолированных камерах (зонах)/ где пребывание ({еловека невозможно или нежелательн (обработка или перемещение изделий в вакууме, под давлением, в радиоактивных или химически вредных средах и т.д.). При этом полная идентичность (или подобие) воспроизведения схватс манипулятора движения управляющей рукоятки значително облегчает работу оператора и позволяет манипулировать предметом труда как при непосредственном наблюдении за ним, так и при отсутствии такой возможности (работа с аналогом предмета труда).
Формула изобретения
Копирующий манипулятор по авт. св. № 722754, о тличающийс я тем, что, с целью расширения зоны обслуживания, он снабжен кронштейном, установленным с возможностью вращения вокруг оси, направление которой совпадает с центральной осью шарового задающего органа, причем шаровой шарнир исполнительного органа установлен на указанном кронштейне.
Источники информации,
принятые во внимание при экспертизе
