(54) КОПИРУЮЩИЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор-трипод параллельно-последовательной структуры | 2016 |
|
RU2616493C1 |
| Копирующий манипулятор | 1978 |
|
SU722754A1 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
| Манипулятор-трипод промышленного назначения | 2017 |
|
RU2651781C1 |
| Копирующий манипулятор | 1980 |
|
SU933447A2 |
| Кран-манипулятор с расширенной зоной действия | 2021 |
|
RU2768059C1 |
| Робот-манипулятор | 2024 |
|
RU2833264C1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| КОПИРУЮЩИЙ МАНИПУЛЯТОР | 2020 |
|
RU2751779C1 |
| Исполнительный орган манипулятора | 1985 |
|
SU1301684A1 |
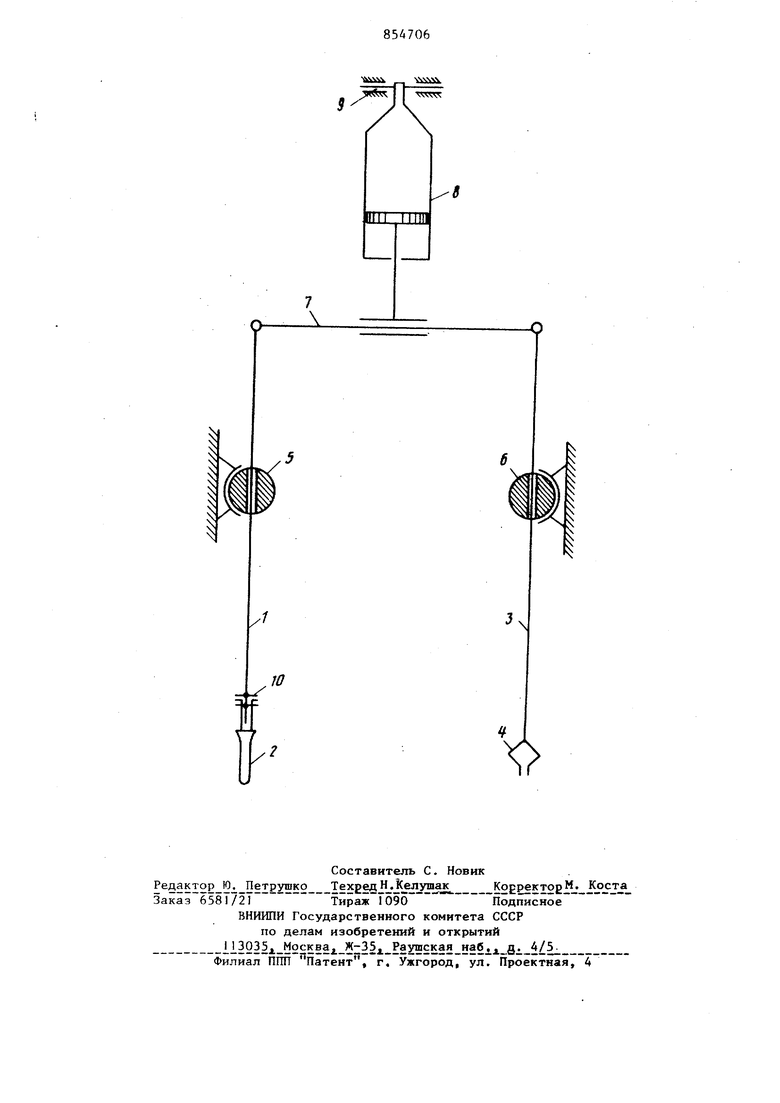
Изобретение относится к машиностроению и может быть использовано в копирующих манипуляторах. Известен копирунлдий манипулятор, содержащий основание, управляющий и исполнительный органы, связанные между собой промежуточным звеном DJ Недостатком данного устройства является его конструктивная сложность и небольшая грузоподъемность. Цель изобретения - упрощение конст рукции и увеличение грузоподъемности. Цель достигается тем, что копирующий манипулятор снабжен шарнирно свя занным с основанием силовым цилиндром и двумя сферическими шарнирами, установленными на основании, причем управляющий и исполнительный органы выполнены в виде параллельных звеньев равной длины, шарнирно связанных между собой промежуточным звеном и составляющих каждое поступательную пару с подвижным элементом сферического шарнира, а промежуточное звено связаНО со штоком силового цилиндра через дополнительно введенную цилиндрическую кинематическую пару. На чертеже изображена кинематическая схема предлагаемого копирующего манипулятора. Манипулятор состоит из управляющего органа 1 с рукояткой 2 управления и исполнительного органа 3, предназначенного для перемещения установленного на нем схвата 4. Органы 1 и 3 выполнены в виде звеньев равной дли-. ны, образующих поступательные пары с подвижными элементами сферических шарниров 5 и 6 и шарнирно соединенных с промежуточным звеном 7, которое связано цилиндрической кинематической парой со штоком силового цилиндра, например гидроцилиндра 8, вращающегося вокруг неподвижной оси 9. На управляющем органе I размещены контакты 10 включения в работу гидроцилиндра 8. Копирующий манипулятор работает следующим образом.
Перемещение рукоятки 2 управления вдоль оси звена 1 (линейное перемещение) приводит к замыканию определенных контактов 10, включению гидросистемы и к перемещению в соответствующем направлении штока гидроцилиндра 8 вместе со звеном 7, а следовательно, и к перемещению исполнительного органа 3 со схватом 4, Любое угловое перемещение управляющего органа 1 (перемещение рукоятки 2 управления вокруг сферического шарнира 5) приводит к аналогичному угловому перемещению исполнительного органа 3 со схватом А вокруг сферического шарнира 6. Это связано с тем, что промежуточное звено 7 движется поступательно, звенья I и 3 параллельны, а сферические шарниры расположены одинаково на звеньях 1 и 3, т.е. в плоскости, проходящей через центры шарниров, образуется механизм шарнирного параллелограмма.
Простота и надежность конструкции предлагаемого манипулятора предполагает возможность его изготовления при наличии несложного оборудования и длительную эксплуатацию. Полная идентичность воспроизведения схватом 4 манипулятора движения управляющей рукоятки 2 значительно облегчает работу оператора. Манипулятор устанавливается в изолированных камерах (зонах), где пребывание человека невозможно или
нежелательно (обработка, перемещение изделий в вакууме, под давлением, в радиоактивных или химически вредных средах и т.д.) .
Формула изобретения
Копирующий манипулятор, содержащий основание, управляющий и исполнительный органы, связанные между собой промежуточным звеном, о т л и ч а ющ и и с я тем, что, с целью упрощения конструкции и увеличения грузоподьемности, он снабжен щарнирно свя3aHFtbiM с основанием силовым цилиндром и двумя сферическими шарнирами, установленными на основании, причем управляющий и исполнительный органы выполнены в виде параллельных звеньев равной длины, шарнирно связанных между собой промежуточным звеном и составляющих каждое поступательную пару с подвижным злементом сферического
шарнира, а промежуточное звено связано со штоком силового цилиндра через дополнительно введенную цилиндрическую кинематическую пару.
Источники информации, принятые во внимание при экспертизе
Л.
,
