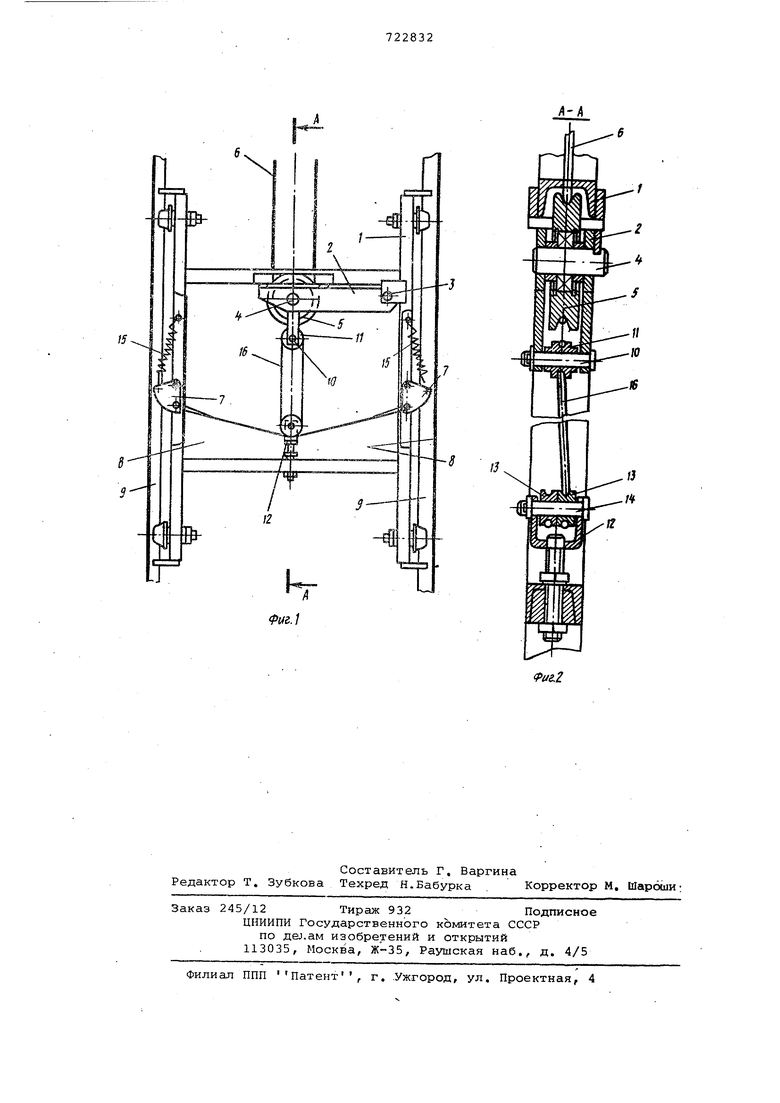
Изобретение относится к эксцент риковым ловителям ДЛЯ грузоподъемных механизмов. Наиболее близким техническим ре шением к изобретению является эксцентриковый ловитель для грузоподъемных механизмов, содержащий установленные на двух осях рамы грузовой платформы грузоподъемного механизма подпружиненные эксцентри ки, выполненные с зубьям - на периферийной части, и плавающий кронштейн, закрепленный одним концом н раме, на другом конце которого ус-, тановлен на оси уравнительный блок огибаекий тяговым органом 1. Негдостатком такого ловителя являются недостаточная надежность сра батывания и конструктивная сложност Цель изобретения - повышение на дежности срабатывания. Указанная цель достигается тем, что эксцентриковый ловитель для гру зоподъемных механизмов снабжен вилкой, смонтированной в нижней части рамы, верхним дополнительным блоком закрепленным на оси плавающего крон штейна, двумя нижними дополнительными блоками, закрепленными на оси ВИЛКИ, и закрепленным концами на эксцентриках гибким тяговым органом, образуюидим полиспастную систему в совокупности с верхним и нижним дополнительными блоками. На фиг. 1 изображен предлагаемый ловитель, общий вид; на фиг. 2 разрез А-А на фиг. 1. Ловитель состоит из установленных на раме 1 грузовой платформы грузоподъемного механизма плавающего кронштейна 2, закрепленного на оси 3 рамы 1 одним концом, на 5другом конце которого установлен на оси 4 уравнительный блок 5, огибаемый тяговым органом 6, например канатом, служащий для удержания эксцентриков 7 в исходном положении. Каждый из эксцентриков 7 выполнен с зубьями на периферийной части, служащими ДЛЯ заклинивания на внутренней поверхности 8 вертикальной направляющей 9. На этом же плече кронштейна 2 закреплен на оси 10 верхний 11-дополнительный блок. В нижней части раNfcj смрнтирована вилка 12 с двумя нижними дополнительными блоками 13, установленными, на оси 14, служащая дпя регулировки положения эксцентриков 7, подпружиненных пружинами 15, служащими для приведения в действие
эксцентриков 7 в момент разрыва или ослабления органа б, каждая из которых одним концом заделана на раме 1 грузовой платформы, а другим - на соответствующем эксцентрике. На эксцентриках 7 закреплены концы гибкого тягового органа 16, образующего полиспастную систему в совокупности с верхним 11 и нижними 13 дополнительными блоками. Зазор между перифериями .эксцентриков 7 и внутренними поверхностями 8 направляющих 9 достигается перемещением вилки 12 в отверстии рамы 1 грузовой платформы,
Эксцентриковые ловители работают следующим образом. Под действием натяжения органа 6 кронштейн 2 подходит к жесткой опоре рамы 1 и опирается на нее. В момент ослабления или разрыва органа 6 грузовая платформа (на чертеже не показана) стремится вниз по направляющим 9, Под действием пружин 15 эксцентрики 7 в момент разрыва или ослабления органа 6 своими периферийными зубчатыми частями соприкасаются с поверхностями 8 вертикальных направляющих 9, при этом гибкий тяговый орган 16 перемещается в полиспастной системе и тянет плавающий кронштейн к нижнему основанию ракы Г.
По мере устремления рамы 1 вниз происходит врезание зубьев эксцентриков 7, заклинивание их и, следовательно, останов опускающейся платформы на том участке направляющих 9, где произошел разрыв каната. При возобновлении натяжения органа б
происходит расклинивание эксцентриков 7 с поверхностями 8 направляю цих 9, и кронштейн 2 поднимается, опираясь на,жесткую опору рамы 1. Грузовая платформа находится в исходf н.ом положении.
Формула изобретенияЭксцентриковый ловитель для груQ зоподъемных механизмов, содержащий установленные на двух осях рамы грузовой платформы грузоподъемного механизма подпружиненные эксцентрики, выполненные с зубьями на периферийной части, и плавающий кронштейн, закрепленный одним концом на раме, на другом конце которого установлен на оси уравнительный блок, огибаемый тяговым органом, о. т л и ч а ющ и и с я тем, что, с целью повы-.
0 шения надежности срабатывания, он, снабжен вилкой, смонтированной в нижней части рамы, верхним дополнительным блоком, закрепленным на оси плавающего кронштейна, двумя нижними дополнительными блоками, закрепленными на оси вилки, и закрепленным концами на эксцентриках гибким тяговым органом, образующим полиспастную систему в совокупности с
0 верхним и нижними дополнительными блоками.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
5 № 205242, кл. В 66 В 5/16, 20,05.66 (прототип).
л-л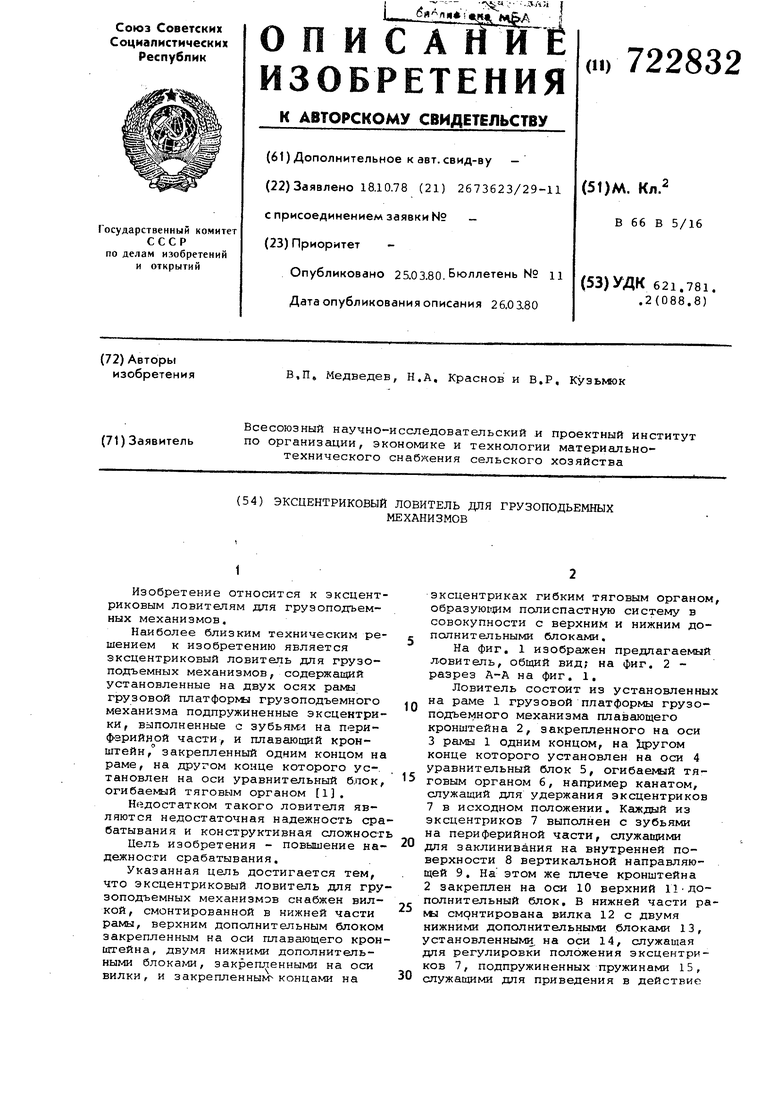
| название | год | авторы | номер документа |
|---|---|---|---|
| Эксцентриковый ловитель для грузоподъемных механизмов | 1980 |
|
SU895877A1 |
| Ловитель для грузоподъемных механизмов | 1988 |
|
SU1668268A1 |
| ЭКСЦЕНТРИКОВЫЙ ЛОВИТЕЛЬ ДЛЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2329940C2 |
| ГРУЗОВОЙ ПОДЪЕМНИК | 2014 |
|
RU2563926C1 |
| Ловитель для грузоподъемных механизмов | 1985 |
|
SU1306873A1 |
| Ловитель грузонесущего органа подъемника | 1982 |
|
SU1155555A1 |
| Ловитель для грузоподъемных механизмов | 1987 |
|
SU1482875A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| Устройство для испытания ловителей подъемника | 1980 |
|
SU901222A2 |