(54) ЭКСЦЕНТРИКОВЫЙ ЛОВИТЕЛЬ ДЛЯ ГРУЗОПОФЕМНЫХ МЕХАНИЗМОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Эксцентриковый ловитель для грузоподъемных механизмов | 1978 |
|
SU722832A1 |
| ЭКСЦЕНТРИКОВЫЙ ЛОВИТЕЛЬ ДЛЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2329940C2 |
| Ловитель для грузоподъемных механизмов | 1988 |
|
SU1668268A1 |
| Ловитель для грузоподъемных механизмов | 1985 |
|
SU1306873A1 |
| Ловитель для грузоподъемных механизмов | 1985 |
|
SU1252275A1 |
| Ловитель для грузоподъемных механизмов | 1986 |
|
SU1337333A1 |
| Ловитель для грузоподъемных механизмов | 1987 |
|
SU1482875A1 |
| Ловитель грузонесущего органа подъемника | 1982 |
|
SU1155555A1 |
| Захват-кантователь для контейнеров с цапфами | 1982 |
|
SU1066934A1 |
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
1
Изобретение относится к подъемно-транспортному машиностроению, в частности к эксцентриковым ловителям для грузоподъемных механизмов.
Известен эксцентриковый ловитель для грузоподъемных механизмов, содержащий установленные на раме платформы эксцентрики, имеющие зубья на периферийной части для взаимодействия с направляющими и уравнительный блок, огибаемый тяговым канатом, кинематически связанным с эксцентриком 1 .
Однако данное устройство имеет сложную конструкцию и недостаточно надежно в .эксплуатации.
Цель изобретения - повышение надежности конструкции.
Для этого уравнительный блок закреплен непосредственно на раме, а указанная кинематическая связь выполнена в виде шарнирно закрепленных на раме подпружиненных двуплечих рычагов, одно плечо каждого из которых снабжено роликом, контактирующим с тяговым канатом, а другое плечо - шарнирно закрепленным на нем толкателем, взаимодействующим с эксцентриком.
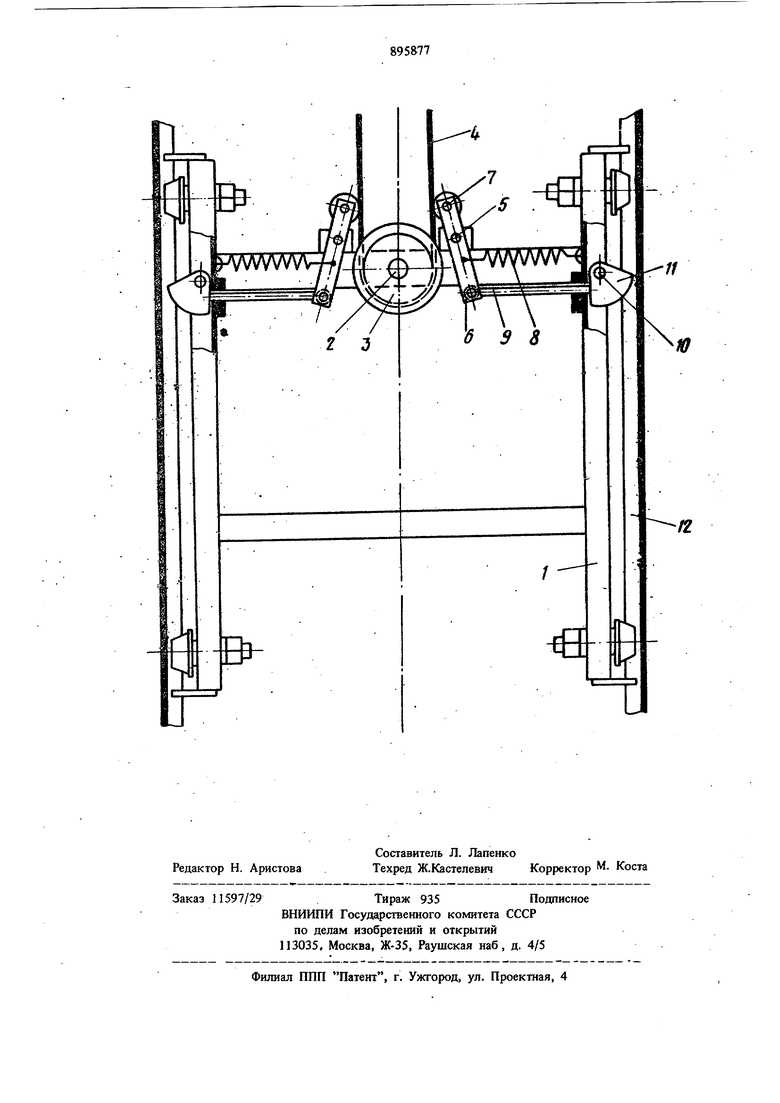
На чертеже показан общий вид устройства
Устройство состоит из рамы 1, иа оси 2 которой установлен уравнительный блок 3 огибаемый гибким тяговым органом 4, напря мер канатом. На осях 5 рамы I смонтированы подпружиненные коромысла 6, имеющие ролики 7, постоянно взаимодействунмцие с гибким тяговым органом 4, посредством пру10жин 8, соединен1П 1х с рамой 1.
В опорах рамы 1 установлены толкатели 9, щарнирно соединенные с коромыслами 6. В раме 1 на осях 10 свободно установлены эксцентрики 11, снабженные зубьями на перифе5 рийной 4acTii. Рама 1 расположена в вертикальных направляющих 12.
Работает устройство следующим образом.
Под действием пружин 8 ролики 7 постоянно прижаты к тяговому органу 4, при этом
20 толкатели 9 занимают положение, при котором эксцентрики 10 занимают крайнее нижнее положение под действием собственной массы, обеспечивая необходимый зазор для вертикального перемещения рамы 1. В момент ослабления или разрыва тягового органа 4 рама 1 стремится опуститься по вертикальным направляющим 12. Под действием пружин 8 коромысла 6 поворачиваются на осях 5. При этом толкатели 9 перемещаются в опорах рамы 1 и поворачивают эксцентрики 11 на осях 10 до соприкосновения его зубьев с вер тикальными направляющими 12. По мере движения рамы I вниз происходит врезание зубьев эксцентриков 11 и заклинивание их в вертикальных направляющих 12 и, следовательно, останов рамы 1 на том участке направляющих 12, где произошел раз|зьш тягового органа 4. При натяжении тягового органа 4 происходит отвод толкателей 9 от эксцентриков ll При подъеме рамы 1 происходит расклинивание эксцентриков 11, после чего они под дей ствием собственной массы занимают крайнее нижнее положение. Рама 1 грузовой платформы находится в исходном положении. Предлагаемое устройство позволяет упростить конструкцию эксцентриковых ловителей и снизить трудоемкость изготовления на 15-20%. Формула р е т е н и я Эксцентриковый ловитель для грузопод емных механизмов, содержащий установленные на раме платформы эксцентрики, имеющие зубья на периферийной части для взаимодействия с направляющими и уравнительный блок, огибаемый тяговым канатом, кинематически связанным с эксцентриками, отличающийся тем, что, с целью повышения надежности конструкции, уравнительный блок закреплен непосредственно на раме, а указанная кинематическая связь вьшолнена в виде щарнирно закрепленных на раме подаружиненных двуплечих рычагов, одно плечо каждого из которых снабжено роликом, контактирующим с тяговым канатом, а другое плечо - щарнирно закрепленным на нем толкателем, взаимодействующим с эксцентриком. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР N 722832, кл. В 66 В 5/16, 1978 (прототип).
