1 (O
конце штока 6 распиложен иод|11)ужинен- ный стакан 7, образующий поступательную пару со стаканом 8 рамы 1. Счака- ны 7 и 8 расположены соосно с осью блока 4-, На осях 10 рамы 1 установлены приводные двуплечие рычаги 11, один конец каждого из которых связан с штоком 6, а другие концы связаны осями 12, размещенными в пазах рычага 11, с тормозными элементами 14, на рабочей поверхности которых выполнены зубья, служащие для заклинивания в вертикальных направляющих 15. На раме 1 и тормозных элементах 14 с помощью осей 16 и 17 крепятся рычаги 18,
1
Изобретение относится к подъемно- транспортному оборудованию, в частности к ловителям для грузоподъемных механизмов.
Цель изобретения - повышение на- дежности работы ловителя.
На фиг. 1 показан.ловитель, общий вид; на фиг. 2 - разрез А-А на фиг.1.
Ловитель содержит раму 1. На оси 2, расположенной в пазу 3 рамы 1, ус тановлены уравнительный блок 4, огибаемый тяговым органом 5, например канатом, и шток 6, выполненный в виде вилки, охватывающей уравнительный блок 4. На противоположном конце штока 6 расположен стакан 7, образующий поступательную пару со стаканом 8 рамы 1. Стаканы 7 и 8 расположены соосно с осью 2 уравнительного блока 4. Внутри стакана 7 размещена пружина 9
На осях 10 рамы .1 установлены приводные двуплечие рычаги 11, один конец каждого из которых связан со штоком 6, а другие концы связаны осями 12, расположенными в пазах 13 рычага 11, с тормозными элементами 14. Тормозные элементы 14 на рабочей поверхности имеют зубья, служащие для заклинивания в вертикальных направляющих 15.
Раму 1 и тормозные элементы 14 через оси 16 и 17 связывают рычаги 18, образующие жесткие параллелограммные системы, позволяющие синхронно рабо- тать при сжатии пружины 9 в случае
J
образуя жесткие параллелограммные системы, ila тормозных элементах 14 и раме 1 установлены жесткие упоры 19 и 20 для ограничения проскальзывания тормозных элементов 14 между направляющими 15. При обрыве тягового органа 5 под действием пружины 9 шток 6 вместе со стаканом 7 перемещается внутри стакана В. Ось уравнительного блока 4 при этом перемещается в пазу 3. Рычаги 18, образующие жесткие параллелограммные системы, перемещают тормозные элементы 14 до соприкоснове- пия их зубьев с внутренней поверхностью направляющих 15. 2 ил.
обрыва тягового органа 5. На раме 1 и тормозных элементах 14 установлены жесткие упоры 19 и 20, которые не позволяют проскальзывать тормозным элементам 14 между направляющими 15.
Предлагаемое устройство работает следующим образом.
При обрыве тягового органа 5 под действием пружины 9 шток 6 вместе со стаканом 7 перемещается внутри стакана 8 рамы 1. Вместе со штоком 6 стремится вниз и уравнительный блок 4, ось 2 которого перемещается в пазу 3 рамы 1. При этом приводные двуплечие рычаги 11, установленные на осях 10 в раме 1, кинематически связывают тормозные элементы 14 со штоком 6 при помощи осей 12. Пазы 13 в рычагах 11 позволяют снимать нагрузки на осях 12 при перемещении блока 4 вниз. Одновременно рычаги 18, образующие жесткие параллелограммные системы, пово- рачиваясь на осях 16 и 17, перемещают тормозные элементы 14 до соприкосновения зубьев рабочей части с внутренней поверхностью направляющих 15. За счет соосности поступательно перемещающегося стакана 7 в стакане 8 с осью 2 блока 4 нагрузка от пружины 9 равномерно распределяется на правую и левую рычажные параллелограммные системы., По мере движения рамы 1 вниз происходит врезание зубьев тормозных .элементов 13 в направляющие 15.
3
Для блсжировкп в крайнем положении тормозных элементон 14 cjiv жат упоры 19 и 20.
Формула изобретения
Ловитель для грузоподъемных механизмов, содержащий раму, установленные на раме тормозные элементы, рабо чая поверхность которых снабжена зубьями, блок, огибаемый тяговым органом, а также подпружиненную шарнирно рычажную систему привода тормозных элементов, имеющую двуплечие рычаги с шарнирами на их концах, отличающийся тем, что, с целью повышения надежности, он снабжен штоком, один конец которого вьшолнен в виде вилки, охватывающей ось блока, а его другой конец - в виде стакана.
Составитель Л, Лапенко Редактор Л. Повхан Техред М.Ходанич
Заказ 1491/20 Тираж 721Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4.
06873 4
подпружиненного относительно рамы, при ЭТОМ в обоих плечах каждого ия упомянутых двуплечих рычагов выполнены продольные пазы, в которых размеще- 5 иы соответствующие им оси упомянутых шарниров, причем ось одного шарнира каждого из двуплечих рычагов расположена на упомянутом штоке, ось другого шарнира расположена на соответствую- 0 щем ему тормозном элементе, при этом рама и тормозные элементы снабжены выполненными с возможностью взаимодействия упорами для ограничения рабочего хода тормозных элементов, а 15 каждьй тормозной элемент шарнирно связан с рамой посредством одноплечих рычагов, образующих вместе с этим тормозным элементом и рамой шарнирный параллелограммный механизм.
Фаг. 2
Корректор Л.Патай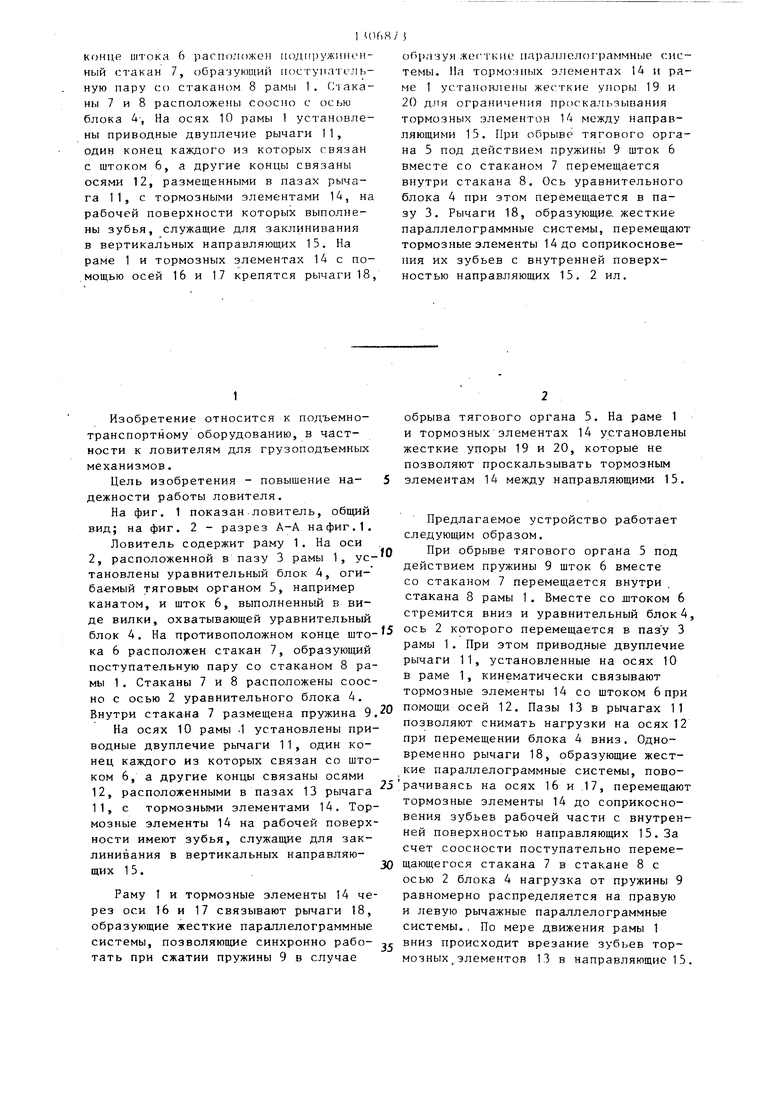

| название | год | авторы | номер документа |
|---|---|---|---|
| Ловитель для грузоподъемных механизмов | 1987 |
|
SU1482875A1 |
| Эксцентриковый ловитель для грузоподъемных механизмов | 1978 |
|
SU722832A1 |
| Эксцентриковый ловитель для грузоподъемных механизмов | 1980 |
|
SU895877A1 |
| Подъемник для проведения монтажных работ | 1987 |
|
SU1534000A1 |
| ЭКСЦЕНТРИКОВЫЙ ЛОВИТЕЛЬ ДЛЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2329940C2 |
| Телескопическое захватное устройство | 1986 |
|
SU1390133A1 |
| Лифт переменной грузоподъемности | 1982 |
|
SU1049400A1 |
| Ловитель для грузоподъемных механизмов | 1988 |
|
SU1668268A1 |
| Захватное устройство для раскрывающейся тары | 1988 |
|
SU1654226A1 |
| Шаговый транспортер для поточной линии | 1981 |
|
SU1098759A1 |
Изобретение относится к конструкции ловителей для грузоподъемных механизмов. Цель изобретения - повьше- ние надежности работы. Ловитель содержит раму 1. На оси, смонтированной в пазу 3 рамы 1, установлены уравнительный блок 4, огибаемый тяговым органом 5, и шток 6 в виде вилки, охватывающей блок 4. На противоположном (Л 00 о 9: 00 со т«.1
| Эксцентриковый ловитель для грузоподъемных механизмов | 1980 |
|
SU895877A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
