сл ел
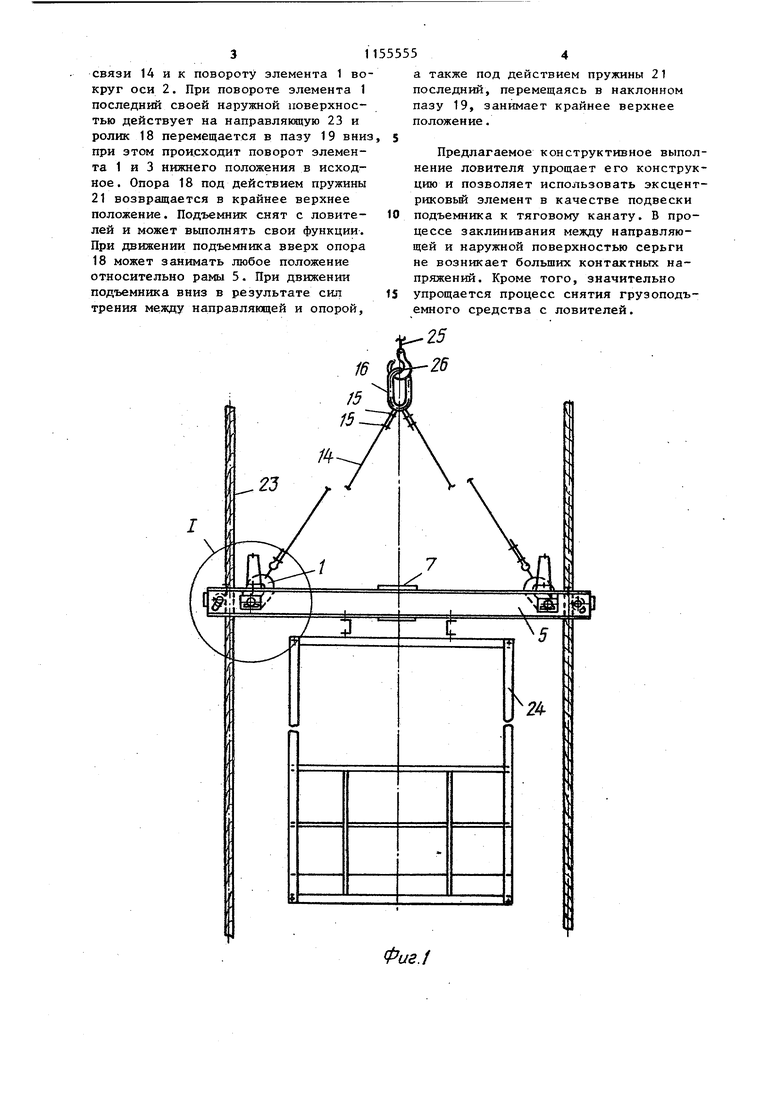
сл сл сл Изобретение относится к подъемнотранспортному машиностроению и может применяться для улавливания грузоподъемного органа подъемника, размещенного в направляющих. Оно может быть использовано в грузоподъемных механизмах, например в люльках, пере мещающихся в гибких направляющих. Известен ловитель грузонесущего органа подъемника, содержащий размещенные на раме и взаимодействующие с направляющей роликовую опору и эксцентриковый элемент, при этом последний подпружинен относительно рамы. Однако известная конструкция ловителя не может быть применена на гибких направляющих, так как в последних возникают большие контактные напряжения, возникающие между указан-20 Ной гибкой направляющей и эксцентриковьм элементом после срабатьюания ловителя, а так же возможность выхода гибкой направляющей из контакта с опорными роликовой опорой и эксцентриковым элементом во время срабатьшания ловителя. Чтобы это предотвратить необходимо установить ограничители перемещения гибкой направляющей относительно опоры и эксцентрика, что значительно усложнит конструкцию. Кроме того, при данной конструкции ловителя снять их с направляющей собственным тяговым органом очень трудно. Поставленная цель достигается тем что в ловителе грузонесущего органа подъемника, содержащем размещенные на раме и взаимодействующие с направляю зей роликовую опору и эксцентриковый элемент, при этом последний подпружи нен относительно рамы и представляет собой овальную серьгу, внутри которой размещена ось ее вращения, а на раме выполнен под углом к направляющей сквозной паз, в котором с возможностью перемещения смонтирована роликовая опора, снабженная пружиной. На фиг. 1 схематически изображен подъемншс, общий вид; на фиг. 2 узел 1 на фиг. 1; на фиг. 3 - разрез А-А на фиг, 2,Ловитель состоит из эксцентриково го элемента 1, вьшолненного в виде овальной серьги. Элемент 1 насажен на ось 2, которая при помощи оседержателя 3 и болтов.4 и прикреплена к раме 5 в виде двух швеллеров, скрепленных друг с другом при помощи накладок 6 и 7. К элементу 1 с одной его.стороны прикреплена при помощи оси 8 пружина 9 растяжения, другой конец пружины прикреплен к втулке 10 кронштейна 11. К свободному концу элемента 1 прикреплена скоба 12, а к последней - при помощи прижимов 13 гибкий тяговьй орган 14. Второй конец гибкого тягового органа при помощи прижимов 15 прикреплен к грузовой скобе 16, К раме 5 с противоположной стороны эксцентрикового элемента 1 на оси 17 установлена роликовая опора 18, которая перемещается в пазу 19. С наружной части рамы 5 к осям 17 прикреплены скобки 20 и с ними одним концом связана пружина 21, другой конец прзпкины закреплен в втулке 22. Под действием 21 опора 18 находится в крайнем верхнем положении. Между роликовой оп.орой 18 и эксцентриковым элементом 1 проходит гибкая направляющая 23, например канат. К низу рамы 5 при помощи болтового соединения подвещена люлька 24. Подъемник перемещается вдоль направляющих при помощи тягового органа 25, который при помощи крюка 26 соединен .со скобой 16. Ловитель подъемника работает след ющим образом. При обрыве тягового органа 25 под действием веса скобы 16, гибкого тягового органа 14 и пружины 9 элемент 1 поворапивается вокруг оси 2, заняв крайнее нижнее положение. При этом между направляющей 23 и наружной поверхностью элемента 1, а также между осью 2 и внутренней поверхностью элемента возникают силы трения, которые замедляют, останавливают и удерживают грузоподъемньй механизм в направлянщих 23. При движении подъемника вниз роликовая опора 18 под действием сил трения и пружин 21 занимает крайнее верхнее положение и в момент заклинивания это положение не изменяет. Снятие подъемника с ловителей происходит следующим образом. Восстанавливается обрыв тягового органа 25. При помощи лебедки крюк 26 опускается к скобе 16. Скоба 16 Зав.одится в зев крюка 26. При помощи лебедки натягивается тяговый орган , 25, что приводит к натяжению гибкой
связи 14 и к повороту элемента 1 вокруг оси 2. При повороте элемента 1 последний своей наружной поверхностью действует на направляющую 23 и ролик 18 перемещается в пазу 19 вниз при этом происходит поворот элемента 1 и 3 нижнего положения в исходное . Опора 18 под действием пружины 21 возвращается в крайнее верхнее положение. Подъемник снят с ловителей и может вьшолнять свои функции. При движении подъемника вверх опора 18 может занимать любое положение относительно рамы 5. При движении подъемника вниз в результате сил трения ме;жду направляющей и опорой,
а также под действием пружины 21 последний, перемещаясь в наклонном пазу 19, занимает крайнее верхнее положение.
Предлагаемое конструктивное выполнение ловителя упрощает его конструкцию и позволяет использовать эксцентриковый элемент в качестве подвески подъемника к тяговому канату. В процессе заклинивания между направляющей и наружной поверхностью серьги не возникает больших контактных напряжений. Кроме того, значительно упрощается процесс снятия грузоподъемного средства с ловителей.
Физ.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обслуживания рабочих оттяжек мачт | 1976 |
|
SU919919A1 |
| Транспортирующее устройство для проведения окрасочных и зачистных операций на борту судна | 1982 |
|
SU1104054A1 |
| Захватное устройство для раскрывающейся тары | 1988 |
|
SU1654226A1 |
| ЭКСЦЕНТРИКОВЫЙ ЛОВИТЕЛЬ ДЛЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2329940C2 |
| ЛОВИТЕЛЬ ДЛЯ ГРУЗОВОГО ПОДЪЕМНИКА | 2013 |
|
RU2526315C1 |
| Устройство для подвески и перемещения люльки | 1983 |
|
SU1126675A1 |
| Строительный подъемник | 1984 |
|
SU1175849A1 |
| Устройство для обслуживания рабочих оттяжек мачт | 1978 |
|
SU931903A1 |
| ЛИФТ И УСТРОЙСТВО ВКЛЮЧЕНИЯ ЛОВИТЕЛЕЙ КАБИНЫ ЛИФТА С ПОДВЕШЕННЫМ НА ТРАВЕРСЕ КУПЕ | 2003 |
|
RU2253604C2 |
| Эксцентриковый ловитель для грузоподъемных механизмов | 1980 |
|
SU895877A1 |
ЛОВИТЕЛЬ ТРУЗОНЕСУЩЕГО ОРГАНА ПОДЪЕМНИКА, содержащий размещенные на раме и взаимодействующие с направляющей роликовую опору и эксцентриковый элемент, при этом последний подпружинен относительно рамы, отличающийся тем, что, с целью улучшения эксплу атационных характеристик путем повынения надежности в работе и обеспечения быстрого снятия ловителя с направляющей, эксцентриковый элемент представляет собой овальную серьгу, внутри которой размещена ось ее вращения, а на раме выполнен под углом к направляющей сквозной паз, в котором с возможностью перемещения смонтирована роликовая опора, снабженная пружиной. о
| Ловитель грузонесущего органа подъемника | 1978 |
|
SU745846A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
