I
Изобретение относится к приборостроению и автоматике и может быть использовано в системах автоматического управления разЛичными производственными процессами, в частности в электрогидравлических механизмах.
Известны регуляторы положения, неподвижная часть которых содержит магнитную систему ю одного или нескольких электромагнитов, а подвижная часть подключена к выходу усилителя управляющего сигнала и соединена с управляемым элементом. В этих устройствах пропорциональность преобразования обеспечивается использованием уравновеишвающих элементов 1.
Наиболее близким к предложенному является регулятор положения, содержаи ий два дифференциально подключенных к усилителю электрического сигнала электромагнита, между соосно расположенными якорями которых размещен управляемый элемент. Устройство снабжено уравновешивающей пружиной, обеспечивающей гфопорциональность между задающим сигналом и перемещением якорей электромагнитов совместно с управляемым элементом 2
Быстродейстиие и точность такого регулятора положения зависят от характеристик уравновешивающей пружины. Для уменьшения ошибок по положению подвижной системы преобразователя, возникающих при воздействии на нее внешних возмущений, следует увеличить жесткость пружины, однако, это приводит к увеличению токов управления электромагнитов, т.е. к потерям мощности и уменьшению коэффициента полезного действия. Таким образом точность данного преобразователя, его способность подавлять внешние возмущения ограничены допустимым током управления и заданной величиной коэффициента полезного действия.
Недостаток устройства состоит в том, чго необходимо поддерживать электрический ток в обмотках электромагнитов даже при установившемся положении подвижной системы (если она установлена не в среднем положении), т.е. в момент, когда никакой полезной работы не совершается. Кроме того, наличие пружин уменьшает надежность преобразователя.
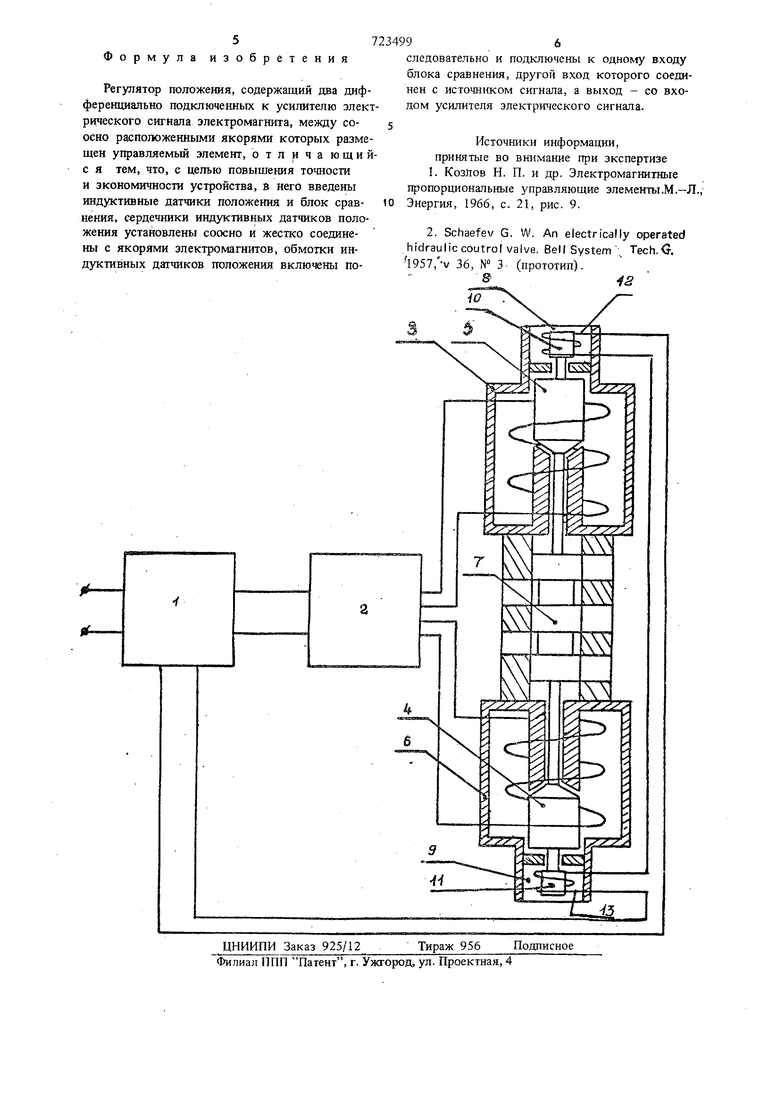
Це.ль изобретения - повышение точности и экономичности устройства. Цель достигается тем, что в устройство введены индуктивные датчики положения и блок сравнения, сердечники индуктивных датчиков положения установлены соосно и жестко соединены с якорями электромагнитов, обмотки индуктивных датчиков положения включены последовательно и подклююны к одному входу блока сравнения, другой вход которого соединен с источником сигнала, а выход со входом усилителя электрического сигнала. Сущность изобретения поясняется чертежом, на котором изображена схема устройства, управляемым элементом которого является золот ник гидроусилителя. Устройство содержит блок 1 сравнения, усилитель 2 электрического сигнала, электромагниты 3 и 4 толкающего типа с якорями 5 и 6, управляемый элемент 7 (золотник гидроусилителя) и индуктивные датчики 8 и 9 положения с сердечниками 10, 11 и обмотками 12, 13. Блок 1 сравнения электрически связан с усилителем 2, в выходные цепикоторого вклю чены обмотки электромагнитов 3, 4. Электромагниты 3, 4 не связаны между собой в магнитном отношении и выполнены в отдельных корпусах. Магнитная цепь каждого из электромагнитов 3, 4 выполнена с зазором с полюсами конической формы и подмагничена током, поступающим в обмотки указанных электромаг нитов от усилителя 2. Между расположегшыми соосно якорями 5, 6 закреплен управляемый элемент 7. Благодаря .подмагничиванию, якоря 5, 6 плотно поджаты к элементу 7, образуя единую подвижную систему. В единых с электромагнитами 3, 4 корпусах расположены индуктивные датчики 8, 9 положения. Обмотки 12 и 13 датчиков 8, 9 подклю чены к блоку 1 сравнения. Устройство работает следующим образом. Входной сигнал и сигнал датчиков 8, 9 положения сравниваются в блоке 1 сравнения, а затем их разность (сигнал рассогласования) поступает на вход усилителя 2, представляюще го собой активный фильтр с заданными частот ными характеристиками. Здесь сигнал рассогла сования усиливается и поступает на обмотки электромагнитов 3, 4. Через обмотки электромагнитов 3, 4 протекает ток, задаваемый усилителем 2, который условно можно разделить на две составляющих Первая составляющая, назьгоаемая синфазны током, одинакова для обоих электромагнитов 3, 4 и обеспечивает их подмагничивание. Вторая составляющая, называемая дифференциальным током, также одинакова - для обоих элект ромагнитов 3, 4, ее величина пропорциональна сигналу рассогласования, но подается она таким образом, что в одном из элек-тромагнитов 3, 4 синфазный и дифференциальный токи суммируются, а в другом вычитаются. Подача входного сигнала приводит к появлению равных и противоположно направленных изменений дифференциальных токов обмоток электромагнитов 3, 4, т.е. в обмотке одного из электромагнитов 3, 4 ток уменьщается на некоторую величину, а в обмотке другого увеличивается на точно такую же величину. При изменении знака входного сигнала меняется и направление дифференциального тока. При нулевом сигнале рассогласования, т.е. при полном соответствии положения элемента 7 и якорей 5, 6 задающему сигналу,.дифференциальный ток отсутствует, и в обмотках электромагнитов 3, 4 протекает только синфазный ток, подмагнисщвающий указанные электромаг- ниты и обеспечивающий надежное соединение якорей 5, 6 с элементом 7. При изменении входного сигнала на выходе блока 1 сравнения появляется сигнал рассогласования, приводящий к возникновению дифференциального тока, вследствие чего электромагниты 3, 4 развивают разлшшые по величине усилия. Разностная сила, приложенная к подвижной системе преобразователя, приводит к перемеидению этой системьгв направлении-действия силы до того момента, когда сигнал датчиков 8, 9 положения сравняется с задающим сигналом. Тогда сигнал рассогласования, дифференциальный ток и, следовательно, разностная сила электромагнитов 3, 4 примут нулевое значение. Аналогичным образом работает устройство и при воздейств ти на его подвижную систему внешних возмущений, например, гидродинамических сил, приводящих к смещению подвижной системы из заданного положения. Однако в этом случае появление дифференциального тока приводит к компенсации внешних возмуще1шй разностной силой электромагнитов 3, 4. Смещение подвижной системы, соответствующее необходимому для компенсации возмущений дифференциальному току, является ошибкой устройства, которая тем меньше, чем больше коэффициент передачи усилителя 2. Высокая точность отработки задающего сигнала и уменьшение влияния внешних возмущений обеспечены использованием чзшствительного датчика положения и большим коэффициентом передачи усилительного устройства. Уменьшение потребляемой устройством мощности обусловлено тем, что ток управления протекает через обмотки электромагнитов только при наличии сигнала рассогласования на выходе устройства сравнения и прекращается с приходом подвижной системы устройства в заданное полох е1гае.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибропривод | 1986 |
|
SU1363392A1 |
| Устройство для контроля подвижной системы электромагнитного аппарата | 1987 |
|
SU1605286A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Устройство для регулирования электрического режима дуговой многофазной электропечи | 1985 |
|
SU1259522A1 |
| Устройство для регулирования напряжения импульсной дуги | 1983 |
|
SU1098705A1 |
| Стенд для испытаний электромагнита | 1989 |
|
SU1644248A1 |
| Устройство для контроля подвижной системы электромагнитного аппарата | 1990 |
|
SU1767567A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Электромагнитный возбудитель вибрации | 1986 |
|
SU1500389A1 |
