; , . 1 . . Изобретение относится к вибрационной технике и может быть использовано при разработке устройств для вибрационных испытаний.
Известны электродинамические вибраторы с подвеской, жесткость которой может регулироваться механически йутем для настройки на резонанс 1 и 2.
Однако эти устройства сложны в регулировке.
..Наиболее близок к предлагаемому по технической сущности электродинаМический вибратор, содержащий ко.пьцевОй постоянный магнит, подвижнук) .систему с силовой катушкой, располо. женной в магнитном зазоре, задающий генератор, усилитель сигнала.и усилитель мощности , подключенный к си ловой катушке 3.
Недостатком этого вибратора является узкий рабочий диапазон частот из-за невозможности плавной регулировки жесткости системы, .4 Цель изобретения - расширение рабочего диапазона частот путем Обеспечения регулирования жесткости подвески подвижной системы.
Это достигается тем, что в вибратЬр введены акселерометр, закрепленный на подвижной системе вибратора, блок двойного интегрирования, подключенный к акселерометру, исумматор, причем усилитель сигнала выполнен с регулируемым Коэффициентом усиления и входом соединен с блоком двойного интегрирования, а выходом с сумматором, ко второму входу которого подключен задающий генератор,
а к выходу - усилитель мощности.
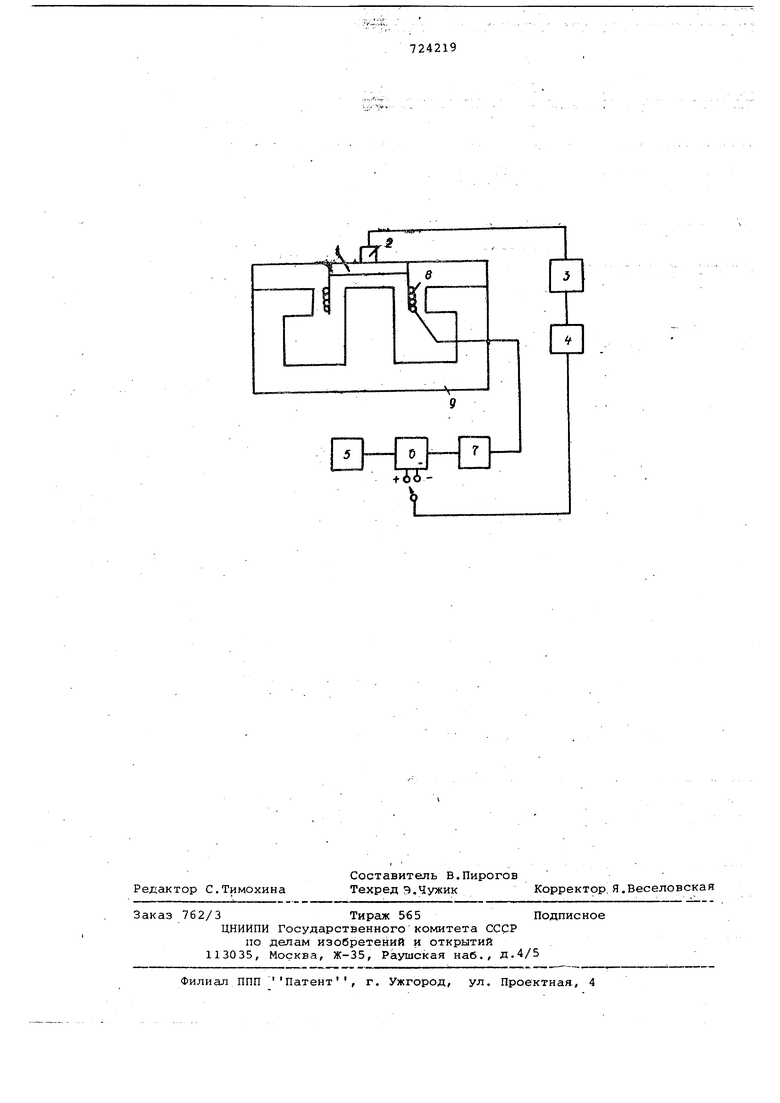
На чертеже изображена блок-схема предлагаемого электродинамического вибратора.
Вибратор состоит из подвижной
системы X,, к которой прикреплен акселерометр 2, соединенный через блок 3 двойного интегрирования с усилителем 4 сигнала. Задающий генератор 5 и усилитель 4 сигнала
присоединены к сумматору 6, который подключен к усилителю 7 мощности, питающему силовую катушку 8, помещенную в зазоре постоянного магнита 9 .
Устройство работает следующим образом.
С акселерометра 2 при кол ебаниях . идет электрический сигнал пх, пропорциональный ускорению X подвижной
системы вибратора 1 (где п - коэффициент преобразования акселерометра) . Этот- сигнал поступает на блок 3 двойного интегрирования, который совершает двойное интегрирование, и с его выхода идет сигнал , пропорциональный колебательному смещению подвижной системы вибратора (здесь суммарный коэффициент преобразования акселерометра и интегратора). При этом и в дальнейшемпредлагается что полоса пропускания всех, электронных устройств (блок двойного интегрирования, усилитель, сумматор, усилитель мощности) значительно шире частот, в которой осуществляется регулировка жесткости подвески, что технически довольно легко ёыполнимо, так как частотные свойства электронных устройств лучше, чем у механических систем. Таким образом, передаточные функции электронных устройств можно считать чисто действительными. Этот сигнал усиливается усилителем 4 сигнала с коэффициентом усиления Hg до значения п n,j X и поступает на вход сумматора 6, на второй вход которого поступает напряжение Up от задающего генератора 5. С выхода сумматора идет электрический сигнал Dpi . Знак плюс или минус здесь получается путем подключения сигнала от усилителя 4 Сигнала к прямому илиИнвертирующему входу сумматора 6. Этот сигнал усиливается усилителем 7 мощности с коэффициентом усиления п до значения U n.jUp ± njnj,njX и поступает в силовую катушку 8 вибратора.
Уравнение движения подвижной системы вибратора имеет, вид
тх -ь гх + kx I, (1)
где m - масса подвижной системы вибртора;.
г - коэффициент силы трения подвески вибратора; k - жесткость подвески; х,х,х - ускорение, скорость и пере мещйние подвижной системы
вибратора;
Л - коэффициент электромеханической связи вибратора; I - ток в силовой катушке вибратора.
Уравнение для электрической цепи сгилов.ой катушки в предположении, что протекает гармонический ток, имеет вид
(2)
- х I(R+R + ito L) ,
-к
R - выходное сопротивление усилителя мощности; сопротивление силовой катушки
индуктивность силовой катушки и
и i п . п п X, (3)
где и -напряжение усилителя мощности.
Из уравнений (2) и (3) определяется ток в силовой катушке
т - Пз Ur t n n ,,
R + i 00 Lt, H) Подстановка этого выражения в уравнение (1) после преобразований дает
Va
.. / - V5 mxv г+S xt Kt
(5)
WL
V .lwL к
1%
Из вновь полученного уравнения видно, что полная (приведенная) (Жесткость подвески вибратора теперь выражается в виде
°К ±.,- . (6)
R + i о. Ly; т.е. становится управляемой за счёт изменения коэффициентов усиления усилителей.
5 Таким образом, предлагаемый электродинамический вибратор имеет плавную регулировку жесткости подвески путем изменения коэффициентов усиления усилителей при высокой 0 надежности регулирования.
Формула изобретения Электродинамический вибратор, содержащий кольцевой постоянный магнит, подвижную систему с силовой катушкой, C расположенной в магнитном зазоре, задающий генератор, усилитель сигнала и усилитель мощности, подключенный к сило.вой катушке, отличающийся тем, что, с целью расширения рабочего диапазона частот 0 путем обеспечения регулирования жесткости подвески подвижной системы, в него введены акселерометр, закрепленный на подвижной, системе вибратора, блок ДВОЙНОГО интегрирования, 5 подключенный к акселерометру, и сумматор, причем усилитель сигнала выполнен с регулируемым коэффициентом усиления и входом соединен с блоком двойного интегрирования, а.выходом - с сумматором,ко второму входу которого подключен задающий генератор, а к выходу - усилитель мощности.
Источники информации, принятые во внимание при экспертизе 5 1. Авторское свидетельство СССР №70815, кл. В Об В 1/04, 1946.
2.Авторское свидетельство СССР №188089, кл. В 06 В 1/04, 1964.
3.Авторское свидетельство СССР 0 №178536, кл. В 06 В 1/04,- 1964
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический вибратор | 1988 |
|
SU1618458A1 |
| Электродинамический вибратор | 1980 |
|
SU977047A1 |
| Электродинамический вибратор | 1980 |
|
SU869842A1 |
| Электродинамический вибратор | 1980 |
|
SU902861A1 |
| Электродинамический вибратор | 1978 |
|
SU921637A1 |
| Электродинамический вибратор | 1975 |
|
SU546386A1 |
| Электродинамический вибратор | 1988 |
|
SU1509126A2 |
| Электродинамический вибратор | 1978 |
|
SU1041168A1 |
| Электродинамический вибратор | 1979 |
|
SU835528A1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |