1
Изобретение относится к подъемно-транспортному маШИностроению.
Известно устройство для захвата и транспортировки бочек грузоподъемным средством, содержащее средние и крайние захватные органы, поворотные Г-образные рычаги, управляемые силовыми цилиндрами со штоками 1.
Недостаток указанного устройства заключается в низкой надежности в работе и в большом объеме ручного труда -при погрузочно-разгрузочных работах.
Целью изобретения является повышение надежности в работе и уменьшение ручного труда при погрузочно-разгрузочных работах.
Для этого устройство снабжено Г-образными кронштейнами с горизонтальными плитами и подшипниками, при этом подшипники жестко закреплены на горизонтальных плитах, а каждый из Г-образных рычагов снабжен платформой, держателем и цапфой, при этом держатели жестко закреплены на платформах и расположены с разворотом в противоположные стороны, причем цапфы встроены в подшипники, а Г-образные рычаги телескопически установлены, в держателях.
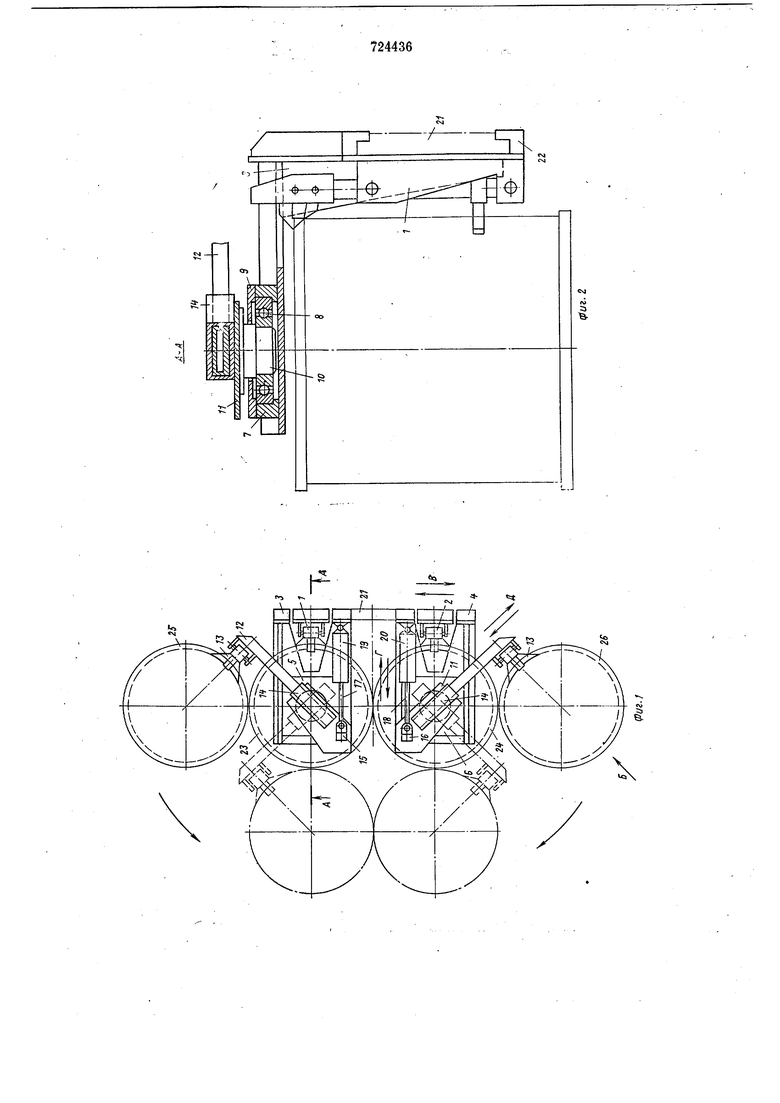
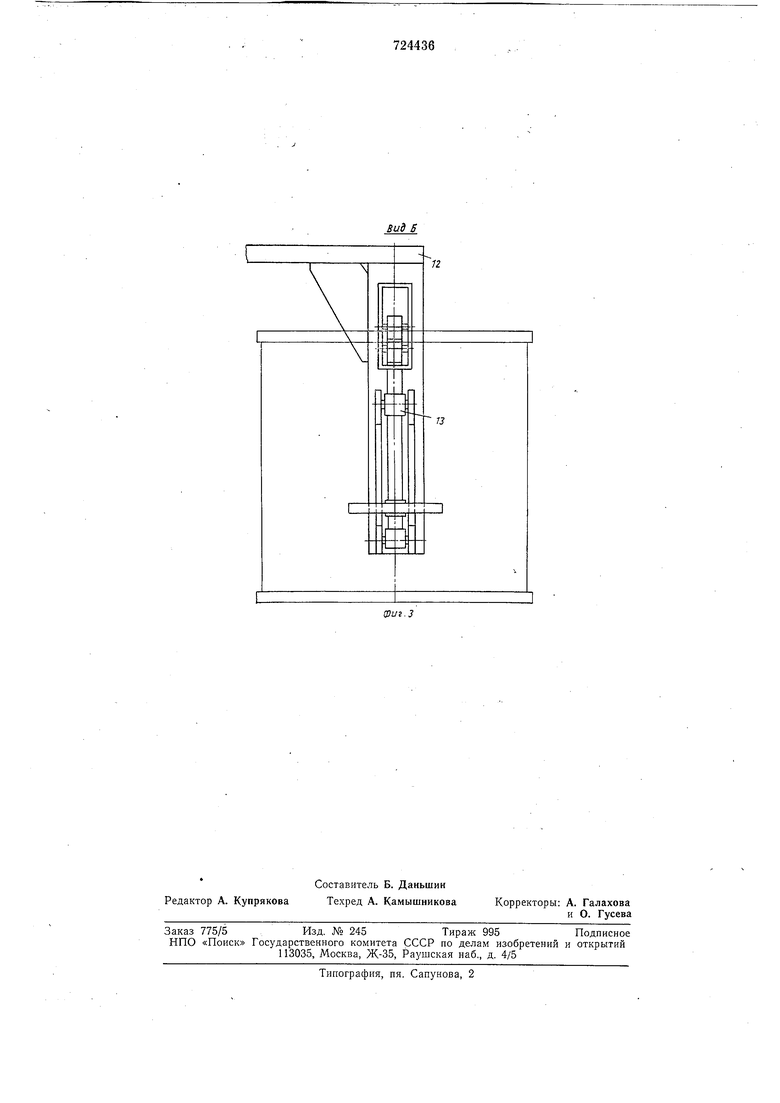
На фиг. 1 схематически изображено описываемое устройство, вид сверху; на фиг.
2 - сечение А-А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 1.
Устройство для захвата и транспортировки бочек грузоподъемным средством, например погрузчиком, содержит средние захватные органы 1, 2, установленные на Г-образных кронштейнах 3, 4, снабженных горизонтальными плитами 5, 6. На плитах 5, 6 установлены корпуса 7 подшипников 8
качения с крышками 9. В каждый подшипник 8 встроена цапфа 10, к которой прикреплена поворотная платформа И с Г-образным рычагом 12, снабженным крайним захватным органом 13. Свободный конец
Г-образного рычага 12 телескопически установлен в держателе 14, размеш;енном на платформе 11. На платформах 11 закреплены проушины 15, 16, связанные со штоками 17, 18 силовых цилиндров 19, 20.
Описанное устройство навешивается на плиту 21 погрузчика посредством навесного приспособления 22.
Средние 1, 2 и крайний 13 захватные органы захватывают средние 23, 24 и крайние
25, 26 бочки.
Устройство работает следующим обраЗОМ.
В исходном состоянии захватные органы
1, 2 расположены против средних бочек 23,
24, а захватные органы 13 - против крайних -бочек 25, 26. Погрузчик подъезжает к бочкам 23-26, расположенным в одну линию, подводит захватные органы под упоры бочек, и движением плит 5, 6 вверх обеспечивается захватывание бочек с последующим отрывом их от опоры. Затем под воздействием штоков 17, 18 силовых цилиндров 19, 20 производится поворот горизонтальных плит 5, 6; бочки устанавливаются в пакет квадратной формы.
В таком положении бочки транспортируют к месту установки, где освобождение устройства от груза производят в обратном порядке.
Перенастройка устройства на бочки определенного диаметра производится посредством выполнения трех движений:
по направлению стрелки В; при этом захватные органы 1, 2 устанавливают симметрично по отношению к средней оси погрузчика на таком расстоянии, чтобы удаление их друг от друга было равно диаметру бочки;
по направлению стрелки Г; при этом корпус 7 подшипника устанавливают и фиксируют на плите кронштейна в таком положении, чтобы геометрические оси цапфы 10 и средней бочки совпали. Одновременно производят и соответствуюп ую установку проушин 15, 16 на платформе. При этом рычаги 12 должны быть повернуты на 45° к продольной оси погрузчика;
по направлению стрелки Д; при этом
длину рычага регулируют так, чтобы ось
симметрии крайних захватных органов 13
проходила через центры крайних бочек
5 25, 26.
Формула изобретения
Устройство для захвата и транспортиров0 ки бочек грузоподъемным средством, содержащее средние и крайние захватные органы, поворотные Г-образные рычаги, управляемые силовыми цилиндрами со штоками, отличающееся тем, что, с целью по5 вышения надежности в работе и уменьшения ручного труда при погрузочно-разгру зочных работах, оно снабжено Г-образными кронштейнами с горизонтальными плитами и подшипниками, при этом подшипники л естко закреплены на горизонтальных плитах, а каждый из Г-образных рычагов снабжен платформой, держателем и цапфой, при этом держатели жестко закреплены на платформах и расположены с разворотом в противоположные стороны, причем цапфы встроены в подшипники, а Г-образные рычаги телескопически установлены в держателях.
Источники информации,
0 принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 462793, кл. В 66 С1/42, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНТОВАТЕЛЬ ДЛЯ БОЧЕК С КОНЦЕВЫМИ ОБРУЧАМИ | 2004 |
|
RU2258659C1 |
| Захватное устройство для группы цилиндрических предметов | 1982 |
|
SU1164193A1 |
| РАБОЧАЯ ПЛАТФОРМА НА ВИЛОЧНОМ ПОГРУЗЧИКЕ | 1991 |
|
RU2021972C1 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 1999 |
|
RU2173270C2 |
| Захват для бочек к погрузчику | 1988 |
|
SU1576481A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ БУКСИРОВКИ АВАРИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2081765C1 |
| Захват для бочек к погрузчику | 1987 |
|
SU1458311A1 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 2012 |
|
RU2486128C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |