Целью изобретения является повышение производительности балансировки.
Это достигается тем, что привод снабжен последовательно соединенными блоком рекуперативного торможения и двухскоростным асинхронным электродвигателем, и второй механической передачей, связывающей валы обоих электродвигателей, входы блока рекуперативного торможения соединены с третьим выходом блока логики и выходом источника переменного напряжения, а выход блока динамического торможения связан с вторым входом двухскоростного асинхронного электродвигателя.
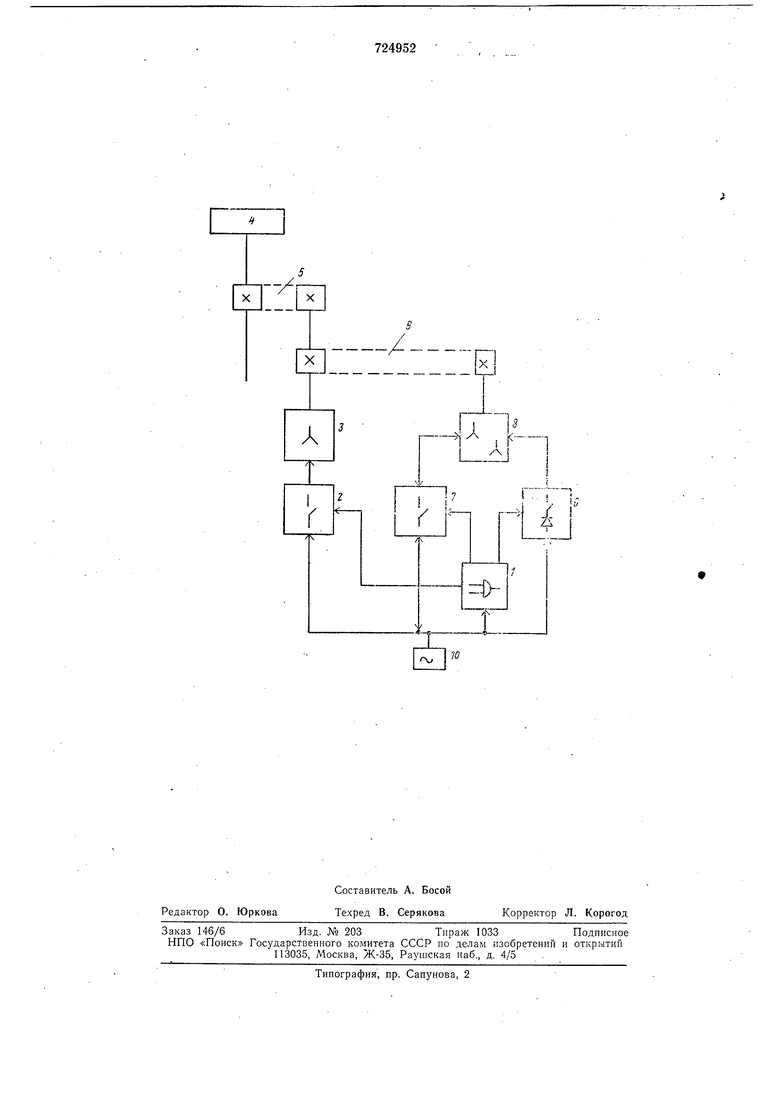
На чертеже приведена блок-схема привода.
Привод балансировочного станка содержит последовательно соединенные блок 1 логики, блок 2 включения и-односкоростной асинхронный электродвигатель 3, шпиндель 4 станка, механическую передачу 5, связывающую вал односкоростного асинхронного электродвигателя 3 со шпинделем 4 станка, блок 6 динамического торможения, вход которого соединен с вторым выходом блока 1 логики, последовательно соединенные блок 7 рекуперативного торможения и двухскоростной асинхронный электродвигатель 8, вторую механическую передачу 9, связывающую валы обоих электродвигателей 3 и 8, и источник 10 переменного напряжения, вы ход которого подключен к вторым входам блока 2 включения и блока 6 динамического торможения и входам блока 1 логики и блока 7 рекуперативного торможения, причем второй вход блока 7 рекуперативного торможения соединен с выходом блока 1 логики, а выход блока 6 динамического торможения связан с вторым входом двухскоростного асинхронного электродвигателя 8, содержащего две обмотки с различным числом пар полюсов.
Устройство работает следующим образом.
По команде блока 1 логики посредством блока 2 включения осуществляется разгон щпинделя 4 односкоростным асинхронным электродвигателем 3 через механическую передачу 5. Одновременно электродвигатель 8 приводится во вращение через механическую передачу 9, передаточное число которой обеспечивает вращение электродвигателя 8 с частотой, превышающей его меньщую синхронную. Это необходимо для обеспечения режима рекуперативного торможения, а также для создания условий интенсивного охлаждения электродвигателя 8. После окончания измерения дисбаланса балансируемого ротора из блока 1 логики подается команда на торможение шпинделя 4.
При этом электродвигатель 3 отключается, а электродвигатель 8 обмоткой с большим числом пар полюсов подключается -к источнику 10 переменного напряжения (сети) посредством блока 7 рекуперативного торможения. Так как частота вращения вала электродвигателя 8 в начальный период выще синхронной, происходит рекуперативное торможение до момента достижения им частоты вращения магнитного поля.
В этот момент из блока 1 логики подается команда в блок 7 на отключение обмотки с большим числом пар полюсов электродвигателя 8 и команда в блок 6 на подключение обмотки с меньшим числом пар полюсов электродвигателя 8. Происходит динамическое торможение. Таким образом достигается эффективное торможение на всем участке снижения частоты вращения балансируемого ротора.
Применение предлагаемого привода позволит повысить производительность балансировочного станка за счет интенсификации пуско-тормозных режимов, а использование рекуперативного торможения обеспечит
улучшение его экономических показателей.
Формула изобретения
Привод балансировочного станка, содержащий последовательно соединенные блок
логики, блок включения и односкоростной асинхронный электродвигатель, шпиндель, механическую передачу, связывающую вал односкоростного асинхронного электродвигателя со шпинделем, блок динамического
торможения, вход которого соединен с вторым выходом блока логики, и источник переменного напряжения, выход которого подключен к вторым входам блоков включения и динамического торможения и входу
блока логики, отличающийся тем, что, с целью повышения производительности балансировки, привод снабжен последовательно соединенными блоком рекуперативного торможения и двухскоростным электродвигателем, и второй механической передачей, связывающей валы обоих электродвигателей, входы блока рекуперативного торможения соединены с третьим выходом блока логики и выходом источника переменного
напряжения, а выход блока динамического торможения связан с вторым входом двухскоростного асинхронного электродвигателя. .:
Источники информации,
принятые во внимание при экспертизе
1.Васильев В. С. и Кутко П. С. Станки и приборы для динамической балансировки. М., Мащгиз, 1959, с. 52-53.
2.Руководство по эксплуатации станка модели МС989, Минск, МСЗ им. Октя-брьской революции, 1973, РЭ2, с. 4 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Привод балансировочного станка | 1980 |
|
SU968639A2 |
| Привод балансировочного станка | 1984 |
|
SU1224630A1 |
| Устройство для защиты электродвигателя постоянного тока привода шпинделя тяжелого балансировочного станка | 1979 |
|
SU873326A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1969 |
|
SU256024A1 |
| Измерительное устройство к балансировочному станку | 1973 |
|
SU694784A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ МАТЕРИАЛОВ | 1991 |
|
RU2042597C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2002 |
|
RU2225602C2 |
| Устройство управления разжимомпОдВЕСКи бАлАНСиРОВОчНОгО CTAHKA | 1979 |
|
SU815540A1 |
| Приводная муфта | 1978 |
|
SU723420A1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД ДЛЯ РОТОРНОГО СТОЛА БУРОВОГО СТАНКА | 1967 |
|
SU196685A1 |