( 54 ПРИВОД БАЛАНСИРОВОЧНОГО СТАНКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод балансировочного станка | 1978 |
|
SU724952A1 |
| Привод балансировочного станка | 1984 |
|
SU1224630A1 |
| Измерительное устройство к балансировочному станку | 1973 |
|
SU694784A1 |
| Устройство для защиты электродвигателя постоянного тока привода шпинделя тяжелого балансировочного станка | 1979 |
|
SU873326A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2002 |
|
RU2225602C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1969 |
|
SU256024A1 |
| Электропривод переменного тока | 1990 |
|
SU1735992A1 |
| Устройство управления разжимомпОдВЕСКи бАлАНСиРОВОчНОгО CTAHKA | 1979 |
|
SU815540A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| Измерительное устройство к балансировочному станку | 1979 |
|
SU911187A2 |
I Изобретение относится к динамичес кой балансировке и может бьоть использовано в автоматических балансировочных станках различных типов для разгона, торможения и установочного поворота балансируемого ротора.
По основному авт. св. № 724952 известен привод балансировочного станка, содержащий последовательно соединенные блок логики, блок включения и односкоростной асинхронный электродвигатель, шпиндель станка, механическую передачу, связывающую вал односкоростного асинхронного электродвигателя со шпинделем станка, блок динамического торможения, вход которого соединен с вторым выходом блока логики последовательно соединенные блоки рекуперативнргнэ торможения и Двухскоростной электродвигатель, вторую механическую пере; :ачу,связывающую валы обоих электродвигателей, и источник переменного напряжения, выход которого подключен к вторым входам блоков включения и динг1Мического торможения и выходам блока логики и блока рекуперативного торможения, второй вход блока рекуперативного торможения соединен выходом блока логики, а выход блока динамическогр торможения связан с вторым входом двухскоростного асинхронного электродвигателя ij.
Однако данный привод не обеспечивает точного подвода места расположения дисбаланса под корректирующий механизм, В связи с этим подвод осуществляется оператором вручную, или балансируемый ротор переносится на
10 другой станок для коррекции дисбаланса Возможна также установка дополнительного электродвигателя, связанного механической передачей со шпинделем станка, но по конструктивным
15 соображениям такое решение не всегда может быть регшизовано.
Целью изобретения является расширение технологических, возможностей балансировочного станка.
20
Поставленная цель достигается тем, что привод балансировочного станка снабжен блоком позиционирова НИН, выход которого связан с первым входом двухскоростного асинхронного
25 электродвигателя, а вход - с выходом источника переменного напряжения, блок логики выполнен четырех выход-ным, четверт;ый выход которого связан с вторым входом блока позициони30рования.
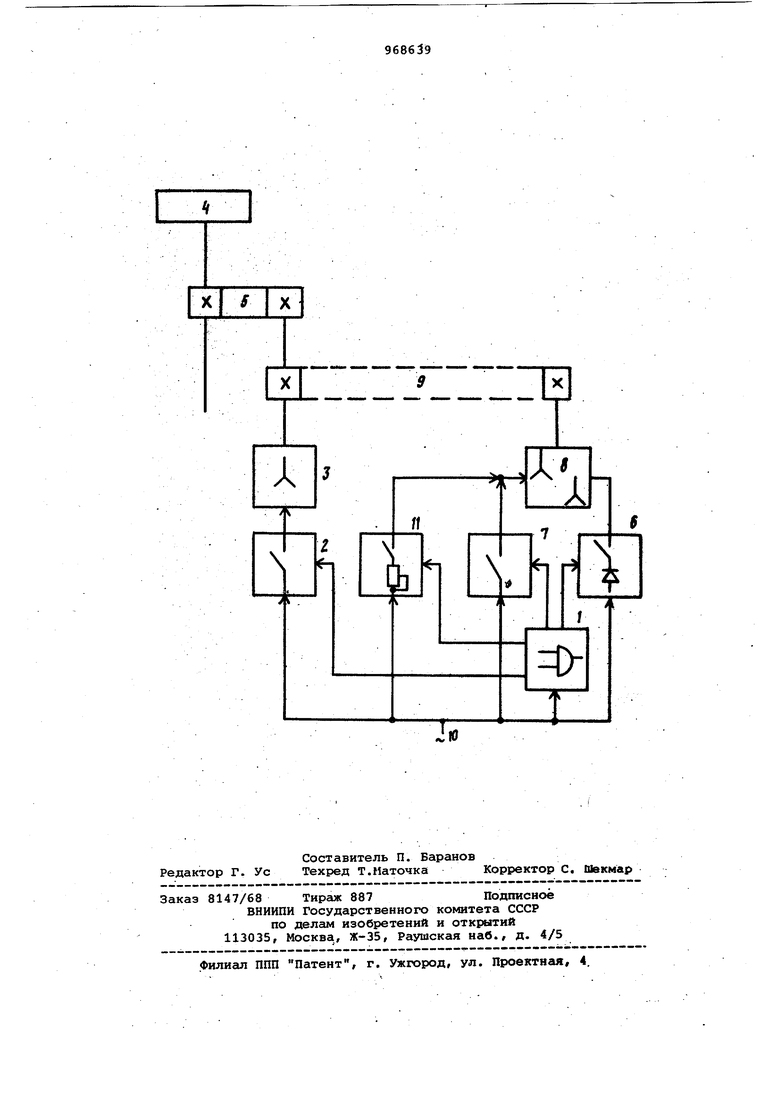
На чертеже приведена блок-схема привада.
Привод балансировочного станка содержит последовательно соединенные блок 1 логики, блок 2 включения и односкоростно асинхронный электр двигатель 3, шпиндель 4 станка, механическую передачу 5/ связывающую вад рдноскоростного асинхронного электродвигателя 3 со шпинделем 4 станка, блок 6 динамического тормр,женин, вход которого соединен с выходом блока 1 логики, последовательно соединенные блок 7 рекуперативного торможения и двухскоростной асинхронный электродвига 8, вторую механическую передачу 9, связывающую валы обоих электродвигателей 3 и 8, источник 10 переменного напряжения, выход которого подключен к вторым входам блока 2 включения, блока 6 динамического торможения и .входам блока 1 логики, блока 7 рекуперативного торможения и блок 11 позиционирования, второй вход блока 7 рекуперативного торможения соединен с третьим выходом блока 1 логики, выход блока 6 динамического торможения связан с вторым входом двухскоростного асинхронного электродвигателя 8, содержащего две обмотки с различным числом пар полюсов, а выход блока 11 . позиционирования связан с первым входом двухскоростного асинхронного электродвигателя 8, а входы соединены с четвертым выходом блока 1 логики и выходом источника 10 переменного напряжения.
Привод работает следующим образом.
По команде блока 1 логики посред CTiBOM блока 2 включения осуществляется разгон шпинделя 4 односкоростным электродвигателем 3 через механческую передачу 5. Одновременно электродвигатель 8 приводится во вращение через механическую передачу 9, передаточное число которой обеспечивает вращение электродвигатля 8 с частотой, превыша1ощей его меньшую синхронную. Это-необходимо для обеспечения режима рекуперативного торможения, а также для создания условий интенсивного охлаждения электродвигателя 8. После окончания измерения дисбаланса балансируемого ротора из блока 1 логики подается команда на торможение шпинделя 4. При этом электродвигатель В обмоткой с большим числом пар полюсов подключается к источнику 10 переменного напряжения посредством блока 7 рекуперативного торможения. Так как частота вращения вала электродвигателя 8 в начальный период выше синхронной, то происходит рекуперативное торможение до момента достижения им частоты вращения магнитного поля. В этот момент из блока 1 логики подается команда в блок 7 на отключение обмотки с большим числом пар полюсов электродвигателя 8 и команда в блок 6 на подключенные обмотки с меньшим числом пар полюсов электродвигателя 8. Происходит динамическое торможение. После окончания торможения из блока 1 логики подается команда на подвод расположения дисбаланса ротора под корректирующий механизм не.изображены . При этом электродвигатель 8 обмоткой с большим числом пар полюсов подключается к источнику 10 переменного напряжения посредством блока 1 позиционирования, а обмоткой с меньшим числом пар полюсов остается подключенным к источнику 10 посредством блока 6 динамического торможения. Таким образом, одна из обмоток двухскоростного электродвигателя 8 работает в двигательном режиме, а другая - в режиме динамического.торможения, что обеспечивает получение частоты вращения пор5адка 1% от низшей номинальной, необходимой для процесса позиционирования.
Применение предлагаемого изобре тения позволяет расширить технологические возможности станка за счет обеспечения возможности точного подвода места расположения дисбаланса под устраняющую головку.
Формула изобретения
Привод балансировочного станка по авт. св.СССР №724952,0 т л ичающийся тем, что, с целью расширения технологических возможностей, он снабжен блоком позиционирования, выход которого связан с первым входом двухскоростного асинхронного .электродвигателя, а вход с выходом источника переменного напряжения, блок логики ввгполнен четырехвыходным, четвертый выход которого связан с вторым входом блока позиционирования.
Источники информации, принятые во внимание при экспертизе
О
