жает производительность процесса балансировки.
Целью изобретения является повышение точности и производительности балансировки.
Для этого предлагаемое устройство снабжено опорным элементом и взаимодействующей с ним гибкой связью, один конец которой соединен с другим концом пружины, а другой--с рычагом, жестко соединяемым с изделием, опорный элемент расположен так, что взаимодействие его с гибкой связью происходит в точке пересечения вертикальной оси оправки и окружности, радиус которой равен расстоянию от оси оправки до места соединения гибкой связи с рычагом, а жесткость пружины выбрана из соотношения
А-- /И
-где /С - жесткость пружины;
М - величина максимального весового
дисбаланса; R - радиус окружности.
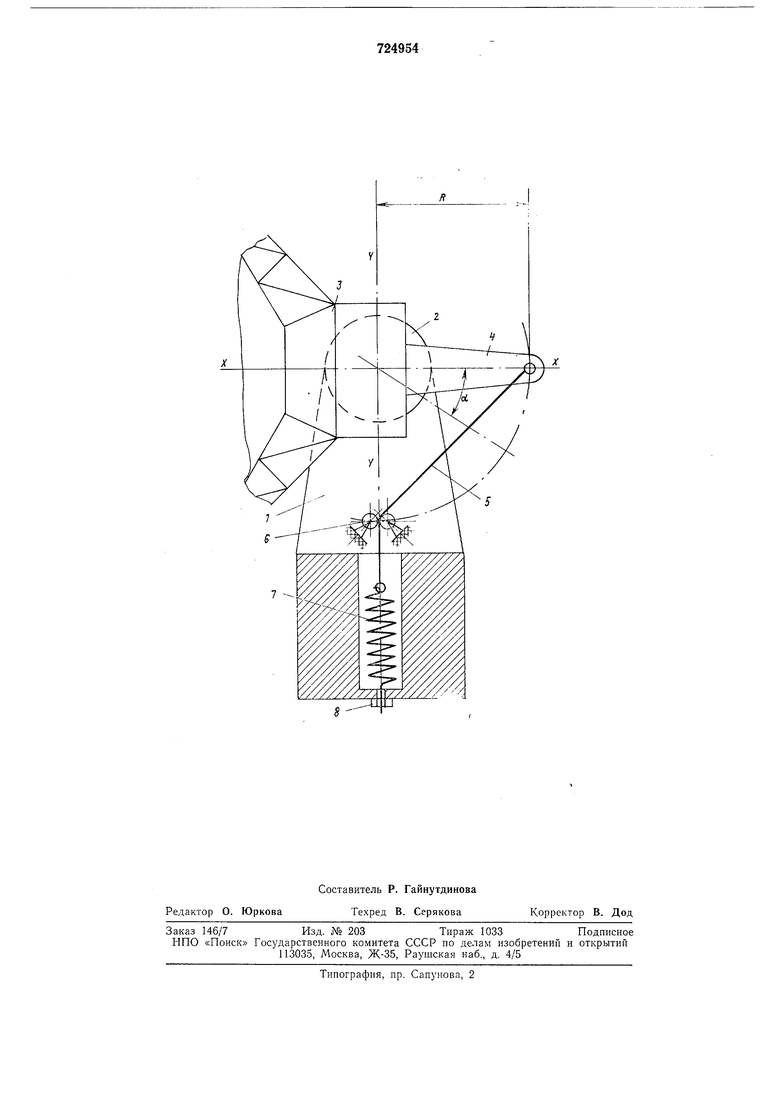
На чертеже изображено устройство для статической балансировки.
Устройство содержит основание 1, оправку 2 для крепления изделия 3, установленную на основании 1 с возможностью новорота вокруг своей оси, и механизм уравновешивания, который выполнен в виде рычага 4, жестко соединяемого с изделием 3, гибкой связи 5, один конец которой соединен с рычагом 4 онорного элемента 6, через который перекинута гибкая связь 5, при этом взаимодействие его с гибкой связью 5 происходит в точке пересечения вертикальной оси Y-У оправки 2 и окружности, радиус R которой равен расстоянию от оси оправки 2 до места соединения гибкой связи 5 с рычагом 4, и пружины 7, один конец которой соединен с гибкой связью 5, а другой закреплен на основании 1 посредством гайки 8, которая регулирует пружину 7 на заданное усилие.
Устройство работает следуюш,им образом.
Изделие 3, закрепленное на оправке 2, поворачивают вокруг своей оси и выставляют в положение максимального дисбаланса, т. е. в такое положение, когда ось X-X совпадает с осью Y-У. В этом положении изделие 3 уравновешивают изменением усилия пружины 7, для чего гайку 8 поворачивают в ту или иную сторону. При этом усилие пружины 7 будет равно KRJ2, т. е.
р„.,
где К. - жесткость пружины;
R - радиус окружности, равный расстоянию от оси у-У оправки 2 до места соединения гибкой связи 5 с рычагом 4.
Жесткость пружины К выбрана из соотношения
К
где М - величина максимального весового дисбаланса.
При изменении угла поворота изделия меняется длина гибкой связи 5 от места крепления ее с рычагом 4 до точки взаимодействия гибкой связи 5 с опориым элементом 6, в связи с чем меняется усилие поджатия пружины 7, а уравновешиБаюш,ий - момент М изменяется по косинусоидальНому закону в зависимости от угла а поворота неуравновешенного изделия, т. е. М KRcosa.
Устройство за счет определенного выполнения механизма уравновешивания позволяет с высокой точностью отслеживать угол поворота неуравновешенного изделия, создавая уравновешиваюпций момент в зависимости от жесткости пружины, которая выбирается по величине максимального весового дисбаланса изделия и расстоянию от оси опоры до места соединения гибкой связи с рычагом.Формула изобретения
Устройство для статической балансировки изделий, содержаш ее основание, оправку для крепления изделий, установленную на основании с возможностью поворота вокруг своей оси, и механизм уравновешивания, имеющий рычаг и пружину, закрепленную одннм концом на основании, отличающееся тем, что, с целью повышения точности и производительности балансировки,
оно снабжено онориым элементом и взаимодействующей с ним гибкой связью, один конец которой соединен с другим концом пружииы, а другой - с рычагом, жестко соединяемым с изделием, опорный элемент
расиоложен так, что взаимодействие его с гибкой связью нроисходит в точке нересечения вертикальной оси оправки и окружности, радиус которой равен расстоянию от оси оправки до места соединения гибкой
связи с рычагом, а жесткость пружины выбрана из соотношения
К где К - жесткость пружины;
М - величина максимального дисбаланса;R - радиус окружности.
Источники информации, принятые во внимание при экспертизе
1.Патент ФРГ № 1286589, кл. 21а4,46/01, 1971.
2.Авторское свидетельство СССР jYo 616538, кл. G 01М 1/30, 1977 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Монтировка телескопа | 1981 |
|
SU993192A1 |
| Устройство для компенсации дисбаланса вращающейся сборочной единицы | 2019 |
|
RU2710399C1 |
| Устройство для статической балансировки деталей | 1987 |
|
SU1420416A1 |
| Стиральная машина | 1989 |
|
SU1678934A2 |
| Способ статической балансировки гребных винтов | 1981 |
|
SU996882A1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2007 |
|
RU2353910C1 |
| Способ балансировки крупногабаритных объектов и устройство для его осуществления | 1977 |
|
SU616538A1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |