(54) АППАРАТ ДЛЯ МЕХАНОТЕРАПИИ НИЖНЕЙ КОНЕЧНОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механотерапевтическое устройство для разработки подвижности голеностопных суставов | 2017 |
|
RU2658760C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ПОСТИЗОМЕТРИЧЕСКОЙ РЕЛАКСАЦИИ МЫШЦ | 1996 |
|
RU2098064C1 |
| Устройство для механотерапии конечностей | 1986 |
|
SU1380748A1 |
| УСТРОЙСТВО ДЛЯ РЕАБИЛИТАЦИИ НАРУШЕННОЙ ФУНКЦИИ РАЗГИБАНИЯ СТОПЫ | 2011 |
|
RU2457817C1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ПОДВИЖНОСТИ И УКРЕПЛЕНИЯ МЫШЦ И СВЯЗОК ГОЛЕНОСТОПНОГО СУСТАВА | 2009 |
|
RU2408352C1 |
| УСТРОЙСТВО ДЛЯ ЛЕЧЕНИЯ ПОВРЕЖДЕНИЙ ГОЛЕНОСТОПНОГО СУСТАВА И СПОСОБ ФИКСАЦИИ ПРОКСИМАЛЬНОГО ОТДЕЛА ГОЛЕНИ ПРИ ПОВРЕЖДЕНИЯХ В ОБЛАСТИ ГОЛЕНОСТОПНОГО СУСТАВА | 1994 |
|
RU2098048C1 |
| Устройство для разработки суставов нижних конечностей | 1990 |
|
SU1722482A1 |
| Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией | 2016 |
|
RU2641065C2 |
| Транспортная шина для нижней конечности | 1990 |
|
SU1724218A1 |
| Устройство для реабилитации нижних конечностей | 1989 |
|
SU1725886A1 |
I
Изобретение относится к медицинской технике, а именно к средствам реабилитации и физиотерапевтического лечения нижних конечностей с поражением суставов и мышц.
Известен аппарат для механотерапии нижней конечности, который содержит основания, подстопник, жестко соединенный со съемной рукояткой ручного привода и связанный с помощью шарнирного механизма с возможностью поворота вокруг горизонтальной оси (оси, проходяшей поперек, закрепленной на подстопиике стопы, требующея разработки) и вертикальной оси с основанием. Такое устройство позволяет производить как пассивные движения-сгибание-разгибанне-пронацию-супинацию голеностопного сустава, стопа которого закреплена (иапример, ремнями) на подстопнике путем приведененя в движение подстопннк1а с помошью ручки, так и активные движения больного сустава, при этом ручка используется для создания необходимой нагрузки иа тренируемый сустав I.
Недостатком этого устройства является ограниченность его функциональных возможностей, заключающаяся в том, что самостоятельно больной не может проводить разработку больного голеностопного сустава, если у него одновременно травмированы и руки, а кроме тогб, ограниченная подвижность устройства (устройство имеет лишь две степени свободы) не обеспечивает достаточно полной тренировки голеностопного сустава.
Цель изобретения - расширение функциональных возможностей аппарата и обеспечение разработки голеностопного сустава больной ноги при помощи здоровой.
Поставленная цель достигается тем, что шарнириый механизм аппарата выполнен
в виде двухпараллелограммного многозвенника, имеющего поперечные и продольные оси с закрепленными на ннх подстопниками, установленные в П-образных кронштейнах, расположенных на поперечной оси с возможностью поворота, причем поперечная
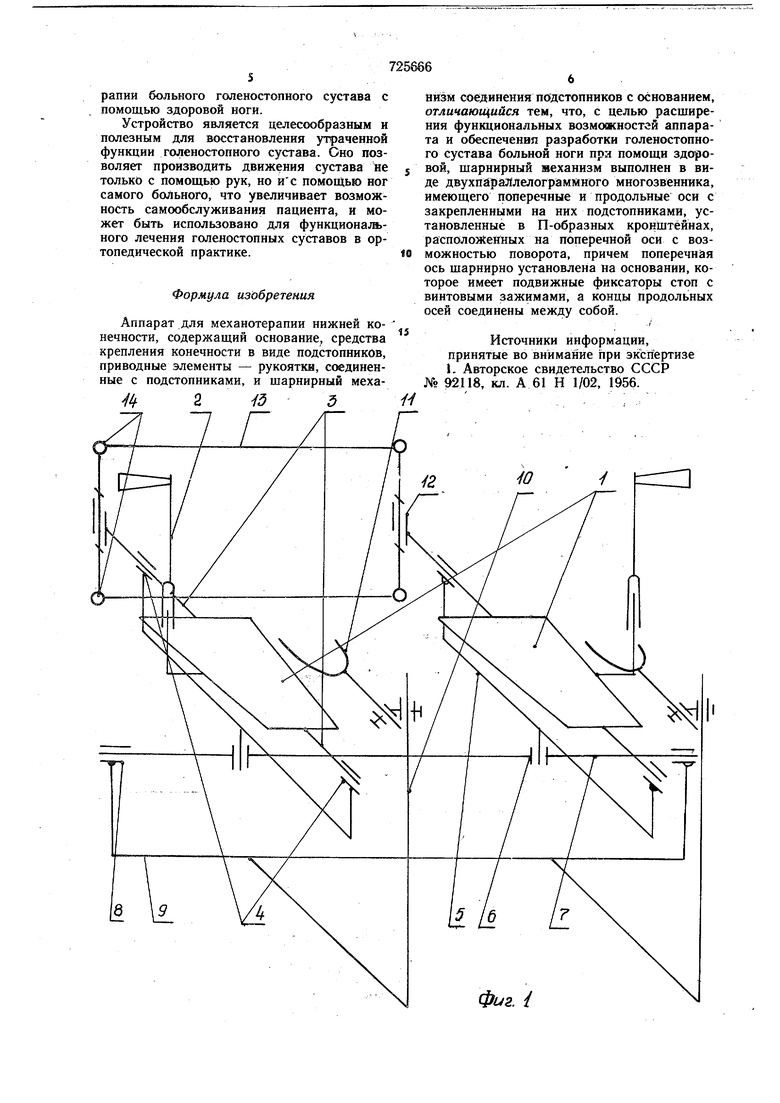
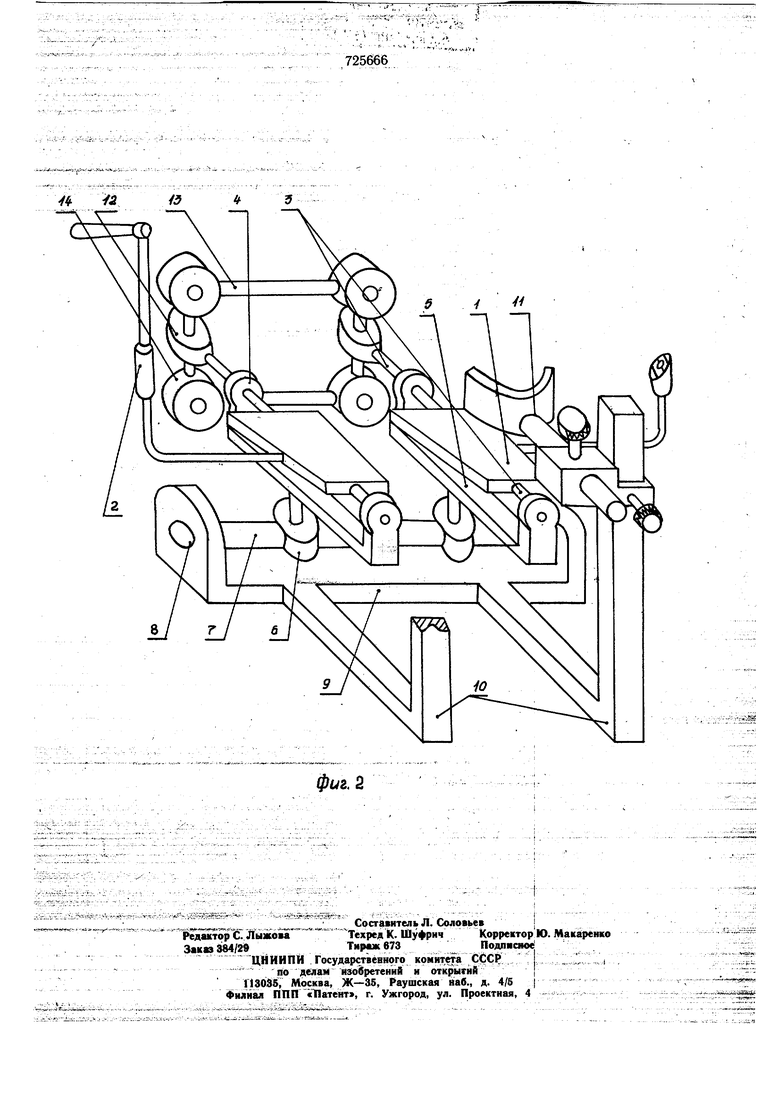
ось шарнирно установлена на основании, которое имеет подвижные фиксаторы стоп с винтовыми зажимами, а концы продольных осей соединены между собой. На фиг. I изображена кинематическая схема аппарата для механотерапии нижней конечности; на фиг. 2 аппарат, общий вид. Аппарат содержит средства крепления конечности 3 виде двух подстопников 1, каждый из которых жестко связан со съемными рукоятками 2, которые являются приводными элементами,. Каждый из этих подстопников имеет возможность вращения вокруг трех взаимно перпендикулярных осей и кинематически связан друг с другом таким образом, что любое перемещение одного подстопника повторяется другим подстбптнйком. Синхронность движения подстопников обеспечивается тем, что каждый из них жестко закреплен на продольной оси 3, укрепленной посредством щарниров 4 на П-образном кронштейне 5. П-образные кронщтейны подстопников 1 посредством щарниров 6 закреплены на поперечной оси 7, что обеспечивает синхронность поворота подстопников 1 относительно горизонтальной поперечной (относительно положения стопы) оси 7. Ось 7 посредством щарниров 8 связана с основанием 9. Таким образом, подстопники 1 соединены с основанием 9 с помощью шарнирного механизма, который выполнен в виде Двухпараллелограммного многозвенника с продольными и поперечными реями. На основании 9 жестко закреплены кронщтейны 10, на концах которых укреплены с возможностью регулировки фиксаторы 11 голеней с вннтовыми зажимами. На концах продольных осей 3 посредством щарйиров 12 закреплен щарнирный механизм, соЬтоящий из звеньев 13, соединенных шарнирами 14, обеспечивающий синхронное вращение подстопников I относительно горизонтальной продольной (относительно положения стопы) и вертикальной осей. Устройство снабжено автономными фиксаторами (не показаны), позволяющими избирательно исключать возможность вращения вокруг любой, из трех осей (одной вертикальной и двух горизонтальных). Для визуальной одецки углов поворота стопы Н ограничения их величины относительно любой из трех осей устройство снабжено шкалами и ограничителями (не показаны). Аппарат работает следующим образом. Для проведения механотерапии голеностопного сустава голени закрепляют, наприиер, ремнями (не показано) на фиксаторах 11 голеней, а стопы закрепляют фиксаторами, например ремнями (йе показано), на соответствующих подстопниках 1. При возможности проведения механотерапии с помощью рук (если руки не травмированы) устанавливают рукоятки 2. По 1Шса лам В1ыставляют ограничители углов поворота подстопников вокруг каждой из трех осей, а при необходимости исключения поворота стопы вокруг одной (или двух) осей производят фиксацию подстопников 1 относительно выбранной оси, исключающей поворот последних относительно нее. После закрепления голеней (выставки ограничителей и фиксаторов) больной самостоятельно проводит механотерапию голеностопных суставов. Причем, если в механотерапии нуждаются оба голеностопных сустава, а обе руки здоровы, то поворот подстопников I осуществляется от одной или двух рукояток 2. При этом пассивные движения стоп осуществляются за счет рукояток 2 ручного привода.. Если же эта стопа соверщает активные движения, то через рукоятки 2 ручного привода на подстопник 1 передается необходимое тормозящее усилие. Если руками механотерапию проводить нельзя, а в механотерапни нуждается только одна нога, а вторая здоровая, то механотерапию больной ноги осуществляют с помощью здоровой ноги. В этом случае, как и в предыдущем, обе голенн закрепляют на фиксаторах 11 голеней, а стопы - на подстопниках 1. Рукоятки 2 снимают. При этом движения здоровой стопы через подстопник 1 передаются на подстопник крепления стопы больной ноги. Поперечный (относительно стопы) горизонтальный поворот подстопника 1 крепления здоровой стопы передается на подстопник 1 крепления стопы больной ноги за счет поворота оси 7, на которой щарнирно через П-образный кронштейн закреплены подстопники 1. Продольный (относительно стопы) горизонтальный поворот подстопника 1 крепления стопы здоровой ноги передается на подстопннк крепления стопы больной ноги посредством механизма, состоящего из звеньев 13, соединенных между собой шарнирами 14, с которым подстопник 1 связан через продольные оси 3 и шарниры 12. Поворот подстопника 1 крепления стопы здоровой ноги передается на подстопник 1 крепления стопы больной ноги за счет механизма, короткими звеньями которого являются ось 7 и параллелограммный механизм, состоящий из звеньев 13, связанных шарнирами 14, длинными звеньями - сами подстопники, закрепленные на продольных осях 3 и П-образных кронштейнах 5, связанных между собой посредством щарниров 12 и 6. Проведение механотерапии больной ноги с помощью здоровой возможно не только при положении пациента сидя, но и в положении пациента лежа, что важно особенно в случаях травмирования позвоночника, когда пациент не может находиться в положении сидя. Аппарат может быть также использован для проведения механотерапии кистевых суставов. При этом на фиксаторах 11 голеней закрепляются предплечья, а на подстопниках 1 - кисти. Движения кисти здоровой руки передаются кисти больной руки аналогично, как и в случае проведения механотерапии больного голеностопного сустава с помощью здоровой ноги.
Устройство является целесообразным и полезным для восстановления утраченной функции голеностопного сустава. Оно позволяет производить движения сустава не только с помощью рук, но ис помощью ног самого больного, что увеличивает возможность самообслуживания пациента, и может быть использовано для функционального лечения голеностопных суставов в ортопедической практике.
Формула изобретения
Аппарат для механотерапии нижней конечности, содержащий основание, средства крепления конечности в виде подстопников, приводные элементы - рукоятки, соединенные с подстопниками, и шарнирный механи зм соединения подстопников с основанием, отличающийся тем, что, с целью расщирения функциональных возможностей аппарата и обеспечения разработки голеностопного сустава больной ноги при помощи здоровой, щарнирный яеханизм выполнен в виде двухпараЛлелограммного многозвенника, имеющего поперечные и продольные оси с закрепленными на них подстопниками, установленные в П-образных кронштейнах, расположенных на поперечной оси с воз0можностью поворота, причем поперечная ось щарнирно установлена на основании, которое имеет подвижные фиксаторы стоп с винтовыми зажимами, а концы продольных осей соедииены между собой.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 92118, кл. А 61 Н 1/02, 1956.
фиг, 2
