(54) ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1987 |
|
SU1667198A1 |
| Электродвигатель с датчиком | 1978 |
|
SU811417A1 |
| Электропривод | 1974 |
|
SU543103A1 |
| Шариковый винтовой механизм | 1985 |
|
SU1263947A1 |
| Электрическая машина постоянного тока | 1976 |
|
SU642827A1 |
| ЭЛЕКТРОПРИВОД ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2016 |
|
RU2630966C1 |
| Мотор-колесо транспортного средства | 1972 |
|
SU500087A1 |
| Безредукторный электрический привод запорной арматуры | 2016 |
|
RU2659703C2 |
| Модуль промышленного робота | 1986 |
|
SU1341016A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
1
Изобретение .относится к электротехнике и может быть использовано при создаяии линейных электроприводов.
Известен электропривод, содержащий электродвигатель с полым ротором и винтовую переда/-з:у. 1 .
Однако известный электропривод из-за отсутствия датчика положения невозможно использовать для точных следящих систем.
Наиболее близким решением к изобретению является электропривод, содержащий электродвигатель с полым ротором, шарико-винтовую передачу, состоящую из гайки и винта, проходящего через полость ротора, и датчик положения 2. .
Недостатками этого устройства являются низкая точность позиционирования и большие габариты привода
Цель изобретения - повышение точности позиционирования и уменьшение габаритов.
Для этого в электроприводе, содержащем электродвигатель с полым ротором, шарико-винтовую передачу, состоящую из гайки и винта, проходящего через полость ротора, и датчик положения, .датчик положения
выполнен с полым ротором, соединенным непосредственно с гайкой указанной передачи.
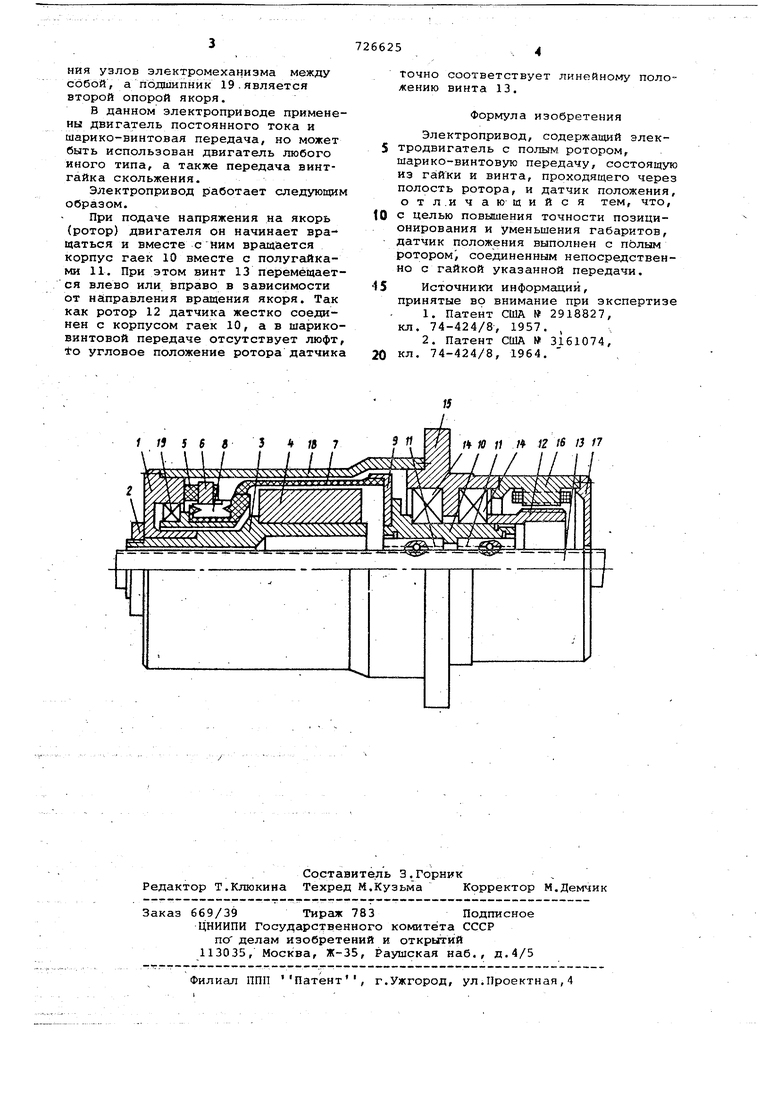
На чертеже изображен электропривод, продольный разрез.
Электропривод представляет собой совмещенную конструкцию электродвигателя и винтового преобразователя вращательного движения в по0ступательное..
Во фланце 1 с Помощью гдйки 2 закреплена втулка 3 с постоянными магнитами 4. На указанном фланце крепится траверса 5 со щетками 6.
5 Полый, якорь (ротор) 7 соединен с коллектором 8 и силовой втулкой 9. В корпусе гаек 10 установлены две полугайки .11 шарико-винтовой передачи . С одной стороны к корпусу гае.к черев силовую втулку 9 жестко
0 прикреплен полый якорь (ротор) двигателя, а с другой стороны полый ротор датчика 12, внутри которого размещен винт 13. Корпус
5 гаек установлен в подшипниках 14. Силовой фланец 15 служит для крепления электропривода. На нем закреплен статор 16 датчика, закрытый крышкой 17. Корпус 18
0 электропривода служит для сое.динения узлов электромеханизма между собой, а подшипник 19.является второй опорой якоря.
В данном электроприводе применены двигатель постоянного тока и шарико-винтовая передача, но может быть использован двигатель любого иного типа, а также передача винтгайка скольжения.
Электропривод работает следующим образом.
При подаче напряжения на якорь (ротор) двигателя он начинает вращаться и вместе с мим вращается корпус гаек 10 вместе с полугайками 11. При этом винт 13 перемещается влево или вправо в зависимости от направления враццения якоря. Так как ротор 12 датчика жестко соединен с корпусом гаек 10, а в шариковинтовой передаче отсутствует люфт, то угловое положение ротора датчика 1 19 5 6 9 3 « 7
точно соответствует линейному положению винта 13.
Формула изобретения
Электропривод, содержащий электродвигатель с полым ротором,
шарико-винтовую передачу, состоящую из гайки и винта, проходящего через полость ротора, и датчик положения, отл.и чающийся тем, что,
с целью повышения точности позиционирования и Уменьшения габаритов, датчик положения выполнен с пЬлым ротором соединенным непосредственно с гайкой указанной передачи.
Источники информации,
принятые во внимание при экспертизе
